连接组件及机器人的制作方法
本公开涉及机器人,特别地涉及一种连接组件和机器人。
背景技术:
1、手术机器人在临床上外科上有大量的应用。外科医生可以远离手术台操纵机器人,完全不同于传统的手术概念,因此在微创外科领域是当之无愧的革命性外科手术工具。
2、手术机器人的操作手用于固定和控制手术器械,不同类型手术需要用到不同操作手和器械。为了机器人适应不同类型手术,操作手必须通过机构实现更换。更换需要简单,并且更换后的操作手应该连接牢靠。
技术实现思路
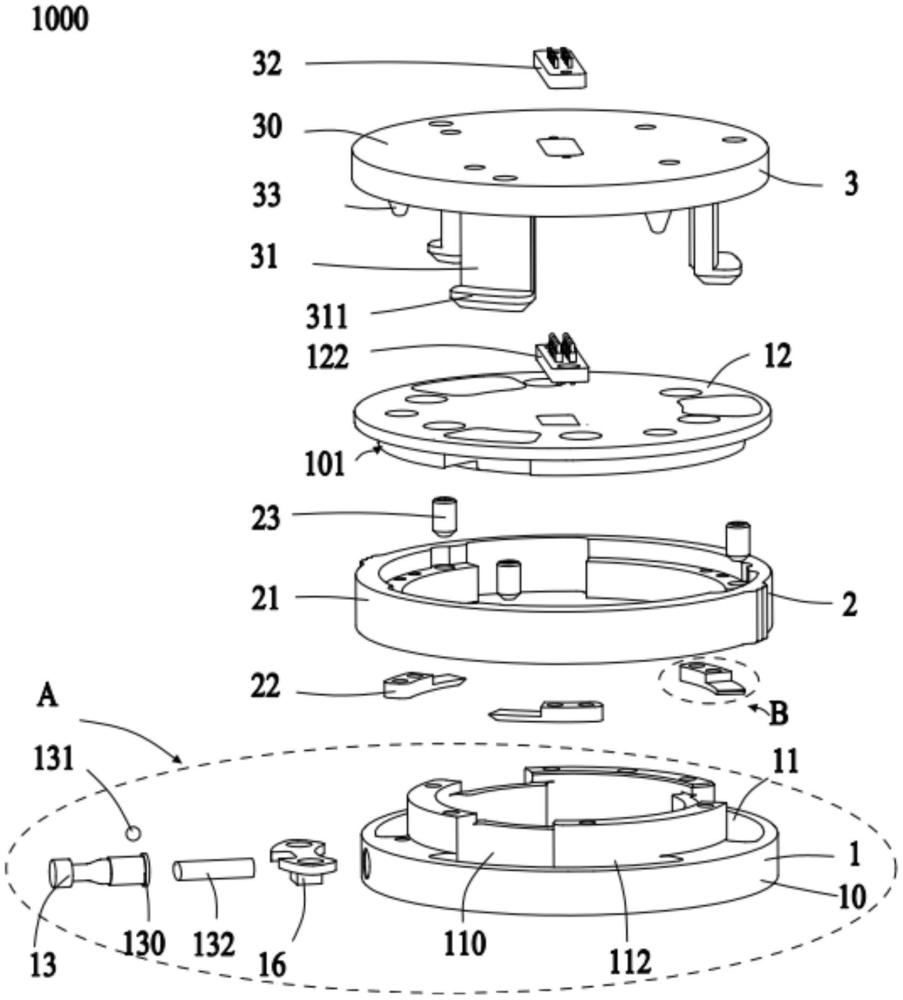
1、为了解决或至少部分地解决上述技术问题,本公开的实施例提供了一种连接组件,包括:固定座,包括固定基座和活动连接于固定基座的定位件;锁紧件,可转动地连接于固定基座以从第一位置转动到第二位置;以及活动座,包括主体以及连接于主体的阻挡臂。其中,当连接组件处于锁紧状态时,锁紧件处于第一位置,固定基座阻挡锁紧件以阻止锁紧件脱离锁紧件,定位件抵接锁紧件以阻止锁紧件相对于固定座转动,阻挡臂抵接锁紧件以阻止活动座脱离锁紧件,主体连接于固定基座以阻止活动座相对于固定座转动。当连接组件处于解锁状态时,锁紧件处于第二位置,定位件脱离锁紧件,阻挡臂脱离锁紧件,主体脱离固定基座。
2、在本公开的一些实施例中,定位件包括按钮和定位珠,按钮和定位珠均可移动地连接于固定基座,当连接组件处于锁紧状态时,按钮支撑定位珠,定位珠抵接锁紧件,当连接组件处于解锁状态时,定位珠脱离锁紧件。
3、在本公开的一些实施例中,当连接组件处于锁紧状态时,定位珠支撑于按钮的外侧面的靠近锁紧件的第一部分,当连接组件处于解锁状态时,定位珠支撑于按钮的外侧面的远离锁紧件的第二部分。
4、在本公开的一些实施例中,固定座还包括连接于固定基座的挡块,定位件还包括弹性件,弹性件连接于挡块和按钮,当连接组件处于解锁状态时,弹性件处于弹性变形状态以具有复位按钮的弹性势能。
5、在本公开的一些实施例中,锁紧件包括可转动连接于固定基座的本体、连接于本体的调节块和活动连接于本体的调节件,当连接组件处于锁紧状态时,调节件抵接调节块,调节块处于弹性变形状态以抵接阻挡臂。
6、在本公开的一些实施例中,调节件包括螺钉,调节块包括固定部和连接于固定部的调节部,固定部连接于本体,调节部的厚度小于固定部的厚度,当连接组件处于锁紧状态时,螺钉抵接调节部,调节部处于弹性变形状态。
7、在本公开的一些实施例中,固定基座包括底座和连接于底座的定位板,锁紧件套设于底座和定位板的外侧,当连接组件处于锁紧状态时,底座和定位板阻挡本体脱离固定基座。
8、在本公开的一些实施例中,按钮可移动地安装底座内,挡块固定连接于底座,弹性件连接于挡块和按钮之间,当连接组件处于锁紧状态时,弹性件处于弹性压缩状态。
9、本公开的实施例还提供一种连接组件,包括:锁紧件,包括本体、活动连接于本体的调节件和连接于本体的调节块;以及活动座,包括阻挡臂;其中,当连接组件处于锁紧状态时,调节件抵接调节块,调节块抵接阻挡臂以阻止活动座脱离锁紧件,调节块处于弹性变形状态。
10、本公开的实施例还提供一种机器人,包括连接组件。该连接组件,包括:固定座,包括固定基座和活动连接于固定基座的定位件;锁紧件,可转动地连接于固定基座以从第一位置转动到第二位置;以及活动座,包括主体以及连接于主体的阻挡臂。其中,当连接组件处于锁紧状态时,锁紧件处于第一位置,固定基座阻挡锁紧件以阻止锁紧件脱离锁紧件,定位件抵接锁紧件以阻止锁紧件相对于固定座转动,阻挡臂抵接锁紧件以阻止活动座脱离锁紧件,主体连接于固定基座以阻止活动座相对于固定座转动。当连接组件处于解锁状态时,锁紧件处于第二位置,定位件脱离锁紧件,阻挡臂脱离锁紧件,主体脱离固定基座。
11、在实施例中提供的连接组件和机器人中,固定基座阻止锁紧件脱离固定座。通过定位件实现锁紧件的转动的锁紧/解锁。阻挡臂实现活动座在脱离锁紧件的方向上的移动的锁紧/解锁。主体实现活动座相对于固定座的转动的锁紧/解锁,从而实现可更换的活动座,并且实现简单的更换和牢靠的连接。
技术特征:
1.一种连接组件,其特征在于,包括:
2.根据权利要求1所述的连接组件,其特征在于,所述定位件包括按钮和定位珠,所述按钮和所述定位珠均可移动地连接于所述固定基座,当所述连接组件处于所述锁紧状态时,所述按钮支撑所述定位珠,所述定位珠抵接所述锁紧件,当所述连接组件处于所述解锁状态时,所述定位珠脱离所述锁紧件。
3.根据权利要求2所述的连接组件,其特征在于,当所述连接组件处于所述锁紧状态时,所述定位珠支撑于所述按钮的外侧面的靠近所述锁紧件的第一部分,当所述连接组件处于所述解锁状态时,所述定位珠支撑于所述按钮的所述外侧面的远离所述锁紧件的第二部分。
4.根据权利要求2所述的连接组件,其特征在于,所述固定座还包括连接于所述固定基座的挡块,所述定位件还包括弹性件,所述弹性件连接于所述挡块和所述按钮,当所述连接组件处于所述解锁状态时,所述弹性件处于弹性变形状态以具有复位所述按钮的弹性势能。
5.根据权利要求1所述的连接组件,其特征在于,所述锁紧件包括可转动连接于所述固定基座的本体、连接于所述本体的调节块和活动连接于所述本体的调节件,当所述连接组件处于所述锁紧状态时,所述调节件抵接所述调节块,所述调节块处于弹性变形状态以抵接所述阻挡臂。
6.根据权利要求5所述的连接组件,其特征在于,所述调节件包括螺钉,所述调节块包括固定部和连接于所述固定部的调节部,所述固定部连接于所述本体,所述调节部的厚度小于所述固定部的厚度,当所述连接组件处于所述锁紧状态时,所述螺钉抵接所述调节部,所述调节部处于所述弹性变形状态。
7.根据权利要求4所述的连接组件,其特征在于,所述固定基座包括底座和连接于所述底座的定位板,所述锁紧件套设于所述底座和所述定位板的外侧,当所述连接组件处于所述锁紧状态时,所述底座和所述定位板阻挡所述本体脱离所述固定基座。
8.根据权利要求7所述的连接组件,其特征在于,所述按钮可移动地安装所述底座内,所述挡块固定连接于所述底座,所述弹性件连接于所述挡块和所述按钮之间,当所述连接组件处于所述锁紧状态时,所述弹性件处于弹性压缩状态。
9.一种连接组件,其特征在于,包括:
10.一种机器人,其特征在于,包括:
11.根据权利要求10所述的机器人,其特征在于,所述定位件包括按钮和定位珠,所述按钮和所述定位珠均可移动地连接于所述固定基座,当所述连接组件处于所述锁紧状态时,所述按钮支撑所述定位珠,所述定位珠抵接所述锁紧件,当所述连接组件处于所述解锁状态时,所述定位珠脱离所述锁紧件。
12.根据权利要求11所述的机器人,其特征在于,当所述连接组件处于所述锁紧状态时,所述定位珠支撑于所述按钮的外侧面的靠近所述锁紧件的第一部分,当所述连接组件处于所述解锁状态时,所述定位珠支撑于所述按钮的所述外侧面的远离所述锁紧件的第二部分。
13.根据权利要求11所述的机器人,其特征在于,所述固定座还包括连接于所述固定基座的挡块,所述定位件还包括弹性件,所述弹性件连接于所述挡块和所述按钮,当所述连接组件处于所述解锁状态时,所述弹性件处于弹性变形状态以具有复位所述按钮的弹性势能。
14.根据权利要求10所述的机器人,其特征在于,所述锁紧件包括可转动连接于所述固定基座的本体、连接于所述本体的调节块和活动连接于所述本体的调节件,当所述连接组件处于所述锁紧状态时,所述调节件抵接所述调节块,所述调节块处于弹性变形状态以抵接所述阻挡臂。
15.根据权利要求14所述的机器人,其特征在于,所述调节件包括螺钉,所述调节块包括固定部和连接于所述固定部的调节部,所述固定部连接于所述本体,所述调节部的厚度小于所述固定部的厚度,当所述连接组件处于所述锁紧状态时,所述螺钉抵接所述调节部,所述调节部处于所述弹性变形状态。
16.根据权利要求13所述的机器人,其特征在于,所述固定基座包括底座和连接于所述底座的定位板,所述锁紧件套设于所述底座和所述定位板的外侧,当所述连接组件处于所述锁紧状态时,所述底座和所述定位板阻挡所述本体脱离所述固定基座。
17.根据权利要求16所述的机器人,其特征在于,所述按钮可移动地安装所述底座内,所述挡块固定连接于所述底座,所述弹性件连接于所述挡块和所述按钮之间,当所述连接组件处于所述锁紧状态时,所述弹性件处于弹性压缩状态。
技术总结
提供了一种连接组件和机器人。连接组件包括:固定座(1),包括固定基座(10)和定位件(13);锁紧件(2),可转动地连接于所述固定基座(1),以从第一位置旋转到第二位置;以及活动座(3),包括主体(30)以及阻挡臂(31)。在所述连接组件中,固定基座(10)阻止锁紧件(2)脱离固定座(10)。定位件实现锁紧件(2)的旋转的锁紧或解锁。阻挡臂(31)实现活动座(3)在与锁紧件(2)分离的方向上移动的锁紧或解锁。主体(1)实现活动座(3)相对于固定座(10)旋转的锁紧或解锁,实现可更换活动座(3)。
技术研发人员:钟清文,冯佳林
受保护的技术使用者:普锐医疗(香港)有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!