具有目标锁定自动对焦模式的立体成像平台的制作方法
本公开总体上涉及一种立体成像平台。更具体地,本公开涉及机器人辅助立体成像平台中的自动对焦模式。各种成像模态通常会被用来对人体的各个部分进行成像。例如,医疗程序(比如外科手术)可能需要实时采集图像,即经对焦的图像。自动对焦通过适当地移动成像设备中透镜组件的部分来使场景中的兴趣对象对焦。然而,在立体成像设备中执行自动对焦是具有挑战性的。立体成像设备通常包括多个透镜,每个透镜都具有单独的图像传感器。透镜被布置成使得每个透镜具有与其他透镜略微偏移的场景视场,比如来自左透镜的左图像和来自右透镜的右图像。由于视角的差异,需要对透镜的对焦进行协调,以便每个透镜都聚焦在同一对象上。否则,透镜可能会同时聚焦在场景中的不同对象上,从而降低图像质量。当立体成像设备由能够在采集图像的同时移动成像设备或相机的机器人系统辅助时,这种挑战会更大。
背景技术:
技术实现思路
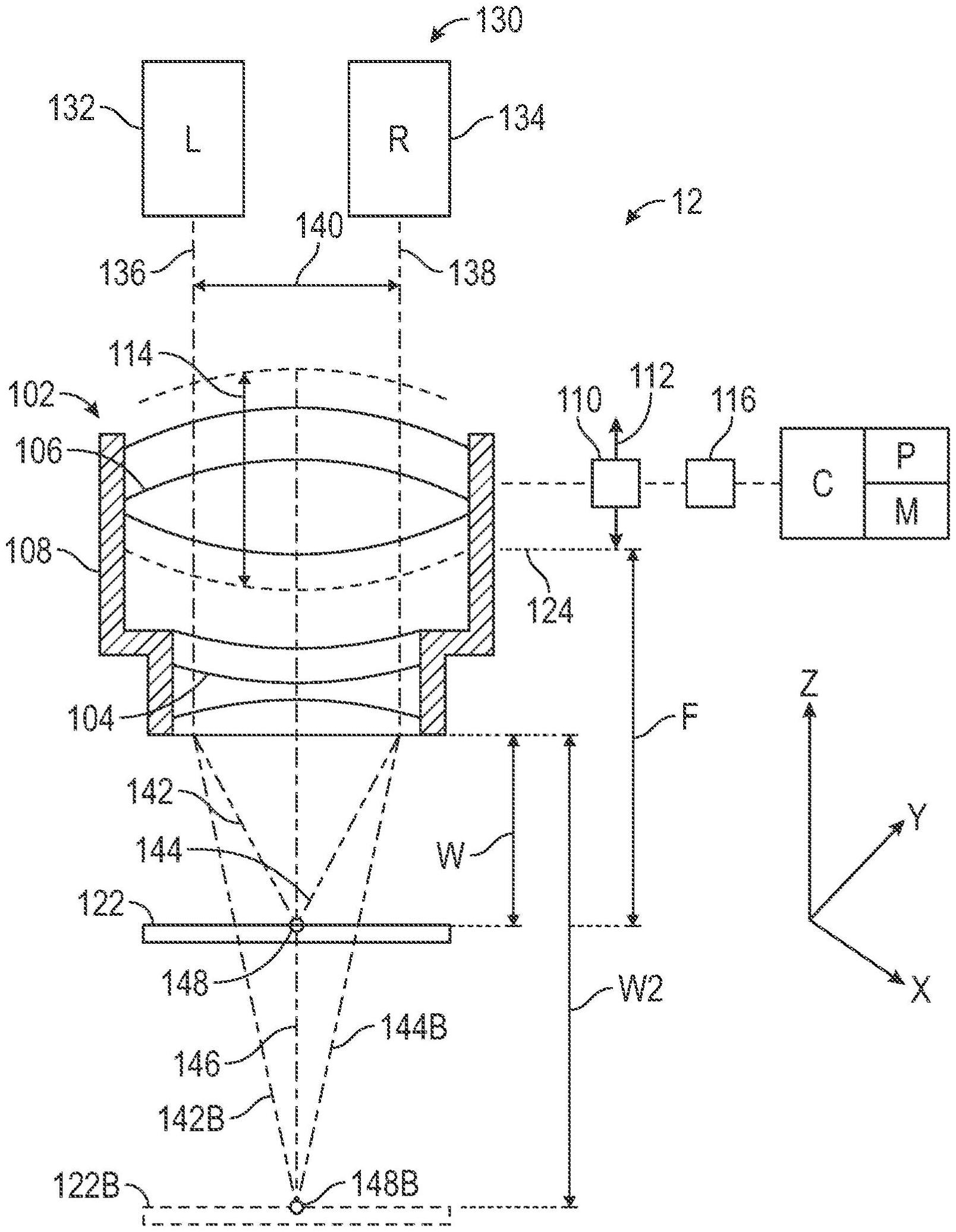
1、本文公开了一种用于对目标部位进行成像的立体成像平台。该立体成像平台包括立体相机,该立体相机被配置为记录目标部位的左图像和右图像,以用于产生目标部位的至少一个立体图像。机器人臂可操作地连接至立体相机,该机器人臂被适配为选择性地使立体相机相对于目标移动。立体相机包括具有至少一个透镜并限定工作距离的透镜组件。该透镜组件具有至少一个对焦马达,该至少一个对焦马达被适配为使该至少一个透镜移动以选择性地改变工作距离。控制器与立体相机通信并且具有处理器和其上记录有指令的有形非暂态存储器。控制器被适配为选择性地执行立体相机的一种或多种自动对焦模式,该一种或多种自动对焦模式包括目标锁定模式。目标锁定模式被适配为在机器人臂移动立体相机的同时保持至少一个立体图像的焦点。
2、当机器人臂移动时,控制器被配置为基于至少一个对焦马达的当前位置来将立体相机的运动限制在虚拟球体的表面。虚拟球体的中心对应于目标部位的位置,并且虚拟球体的半径对应于当前位置的工作距离。控制器被配置为限制工作距离的变化,使得虚拟球体的半径处于最大工作距离和最小工作距离内,控制器被配置为在机器人臂上强化人工机器人边界。
3、当机器人臂移动时,控制器被配置为将立体相机的视图向量指向虚拟球体的中心。虚拟球体的中心对应于目标部位的位置。控制器被配置为确定当目标部位移动时与目标部位中的目标点的运动相对应的动态轨迹。控制器被配置为当目标部位移动时将虚拟球体的中心的视图向量替换为动态轨迹。
4、控制器被配置为确定当机器人臂移动时工作距离的更新值,并将虚拟球体的半径重置为述工作距离的更新值。控制器被配置为确定与工作距离的更新值相对应的至少一个对焦马达的马达命令。控制器被配置为传输与更新值相对应的马达命令,使得在机器人臂移动时至少一个立体图像的焦点保持对准。
5、当不再检测到机器人臂的移动时,控制器被配置为部分地基于清晰度信号、最大清晰度信号和最大清晰度的导数来确定用于至少一个对焦马达的马达命令。清晰度信号可以被定义为至少一个立体图像中的对象的各边缘之间的对比度。最大清晰度信号可以被定义为在扫描时段期间观察到的最大清晰度值。当不再检测到机器人臂的移动时,控制器被配置为传输与最大清晰度信号的最高值相对应的马达命令。
6、传感器可以可操作地连接到机器人臂,该传感器被配置为检测由操作者对立体相机施加的一个或多个力。一个或多个力包括平移力和旋转力。机器人臂包括至少一个关节、关节马达和关节传感器,该关节马达和该关节传感器耦接到至少一个关节。关节马达被配置为使至少一个关节绕轴线旋转。关节传感器被配置为传输至少一个关节的位置。
7、本文公开了一种用于对目标部位进行成像的机器人成像平台。该机器人成像平台包括立体相机,该立体相机被配置为记录目标部位的左图像和右图像,以用于产生目标部位的至少一个立体图像。机器人臂可操作地连接至立体相机,该机器人臂被适配为选择性地使立体相机相对于目标部位移动。立体相机包括具有至少一个透镜并限定工作距离的透镜组件,该透镜组件具有至少一个对焦马达,该至少一个对焦马达被适配为使至少一个透镜移动以选择性地改变工作距离。控制器与立体相机通信,并且具有处理器和其上记录有指令的有形非暂态存储器。控制器被适配为选择性地执行立体相机的一种或多种自动对焦模式,该一种或多种自动对焦模式包括目标锁定模式。目标锁定模式被适配为在机器人臂移动立体相机的同时使目标部位实时锁定,该目标锁定模式允许工作距离的变化。
8、控制器被配置为确定机器人臂是否移动。当机器人臂移动时,控制器被配置为基于至少一个对焦马达的当前位置将立体相机的运动限制在虚拟球体的表面,虚拟球体的中心对应于目标部位的位置,并且虚拟球体的半径对应于当前位置的工作距离。当机器人臂移动时,控制器被配置为将立体相机的视图向量指向虚拟球体的中心,使得虚拟球体的中心对应于目标部位。
9、控制器可以被配置为确定当目标部位移动时与目标部位中的目标点的运动相对应的动态轨迹。控制器可以被配置为当目标部位移动时将虚拟球体的中心的视图向量替换为动态轨迹。控制器被配置为确定当机器人臂移动时工作距离的更新值,并将虚拟球体的半径重置为述工作距离的更新值。控制器被配置为确定与工作距离的更新值相对应的对焦马达的马达命令。控制器被配置为传输与更新值相对应的马达命令,使得在机器人臂移动时至少一个立体图像的焦点保持对准。
10、当不再检测到机器人臂的移动时,控制器被配置为部分地基于清晰度信号、最大清晰度信号和最大清晰度的导数来确定用于对焦马达的马达命令。清晰度信号可以被定义为至少一个立体图像中的对象的各边缘之间的对比度。最大清晰度信号被定义为在扫描时段期间观察到的最高清晰度值。当不再检测到机器人臂的移动时,控制器被配置为传输与最大清晰度的导数的最大值相对应的马达命令。
11、通过以下结合附图对实施本公开的最佳模式的详细描述,本公开的上述特征和优点以及其他特征和优点将显而易见。
技术特征:
1.一种用于对目标部位进行成像的立体成像平台,所述立体成像平台包括:
2.如权利要求1所述的立体成像平台,其中:
3.如权利要求2所述的立体成像平台,其中:
4.如权利要求2所述的立体成像平台,其中:
5.如权利要求4所述的立体成像平台,其中:
6.如权利要求2所述的立体成像平台,其中:
7.如权利要求6所述的立体成像平台,其中:
8.如权利要求2所述的立体成像平台,其中:
9.如权利要求8所述的立体成像平台,其中:
10.如权利要求1所述的立体成像平台,进一步包括:
11.如权利要求1所述的立体成像平台,其中:
12.一种用于对目标部位进行成像的机器人成像平台,所述机器人成像平台包括:
13.如权利要求12所述的机器人成像平台,其中:
14.如权利要求13所述的机器人成像平台,其中:
15.如权利要求13所述的机器人成像平台,其中:
16.如权利要求15所述的机器人成像平台,其中:
17.如权利要求12所述的机器人成像平台,其中:
18.如权利要求17所述的机器人成像平台,其中:
技术总结
一种立体成像平台包括被配置为记录目标部位的左图像和右图像的立体相机。机器人臂可操作地连接至立体相机,该机器人臂被适配为选择性地使立体相机相对于目标移动。立体相机包括具有至少一个透镜并限定工作距离的透镜组件。该透镜组件具有至少一个对焦马达,该至少一个对焦马达被适配为使该至少一个透镜移动以选择性地改变工作距离。控制器被适配为选择性地执行立体相机的一种或多种自动对焦模式。该控制器具有处理器和有形的非暂态存储器,该存储器上记录有指令。自动对焦模式包括目标锁定模式。目标锁定模式被适配为在机器人臂移动立体相机的同时保持至少一个立体图像的焦点。
技术研发人员:P·特里,D·罗
受保护的技术使用者:爱尔康公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!