用于验证用于医疗或外科远程操作的主从式机器人系统的主设备的完整性的方法和相关机器人系统与流程
背景技术:
技术实现思路
1、本发明的目的是提供一种用于验证用于医疗或外科远程操作的主从式机器人系统的主设备的结构和/或功能完整性的方法,该方法允许至少部分地克服前述参考现有技术的缺点,并且对在所考虑的技术领域中特别感受到的前述需求做出响应。这种目的通过根据权利要求1所述的方法来实现。
2、这种方法的另外的实施例由权利要求2至26来限定。
3、本发明的另一个目的是提供一种用于管理主设备的异常的方法,该方法包括执行前述用于验证主设备的完整性的方法。这种方法由权利要求27至28来限定。
4、本发明还有一个目的是提供一种用于医疗或外科远程操作的机器人系统,该机器人系统被配备为执行前述控制方法。这种目的通过根据权利要求29所述的系统来实现。
5、这种系统的另外的实施例由权利要求30至45来限定。
技术特征:
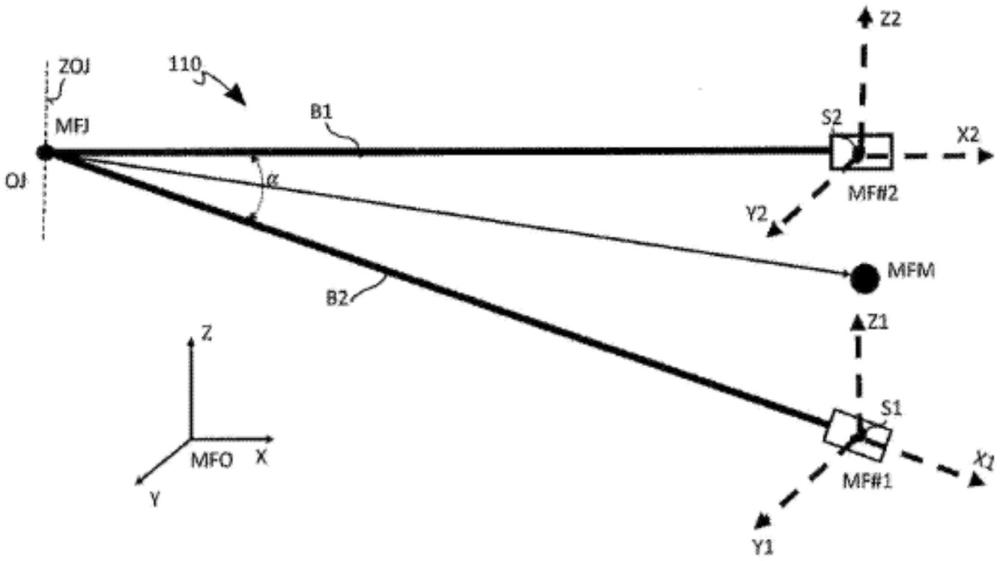
1.一种用于验证主设备(110;1110;1210、1220;1310;1410;1510;1610)的结构和/或功能完整性的方法,所述主设备是手持式的并且是无约束的,所述方法用于控制用于医疗或外科远程操作的机器人系统,其中,所述主设备包括主体,所述主体包括被约束为关于公共轴线(zoj;x-x)相对旋转和/或平移的两个刚性部分(b1、b2;1180、1190;1380、1390;1480、1490;1580、1590;1680、1690),
2.根据权利要求1所述的方法,其中,用于医疗或外科远程操作的所述机器人系统包括:
3.根据权利要求1或2所述的方法,其中,所述测量和/或检测步骤包括:
4.根据权利要求3所述的方法,其中,用于外科或医疗远程操作的所述机器人系统还包括至少一个追踪系统,所述至少一个追踪系统适合于在预定追踪体积内检测所述主设备的输入位置和取向,使得所述从手术器械的致动取决于所述外科医生通过所述主设备给出的所述手动命令和/或所述主设备的位置和取向。
5.根据权利要求3或4所述的方法,其中,所述测量和/或检测步骤由两个或更多个磁传感器执行,所述两个或更多个磁传感器中的每个磁传感器布置在属于所述主设备或与所述主设备集成的所述至少两个点中的相应一个点处,并且被配置为检测由被约束到用于外科或医疗远程操作的所述机器人系统的一部分的磁场发生器所生成的磁场的相应局部值,
6.根据权利要求3或4所述的方法,其中,所述测量和/或检测步骤由至少一个光学传感器或摄像头来执行,所述至少一个光学传感器或摄像头与用于远程操作手术的所述机器人系统相关联和/或受约束于用于远程操作手术的所述机器人系统,
7.根据权利要求3至6中任一项所述的方法,其中,所述方法还包括:
8.根据前述权利要求中任一项所述的方法,其中,属于所述主设备或与所述主设备集成的所述至少两个点包括:
9.根据权利要求1至8中任一项所述的方法,其中,所述主设备包括主体,所述主体包括两个刚性部分(b1、b2;1380、1390;1480、1490;1580、1590;1680、1690),所述两个刚性部分被约束为关于公共轴线相对旋转,其中,由所述外科医生给出的命令与所述两个刚性部分之间的张开角的变化对应,
10.根据权利要求1至8中任一项所述的方法,其中,所述主设备包括两个刚性部分(1180;1190),所述两个刚性部分被约束为在与主设备主体的纵向延伸部一致的方向上关于彼此平移,所述两个刚性部分在围绕所述主设备主体的所述纵向延伸部的旋转中彼此是集成一体的,其中,由所述外科医生给出的命令对应于一个刚性部分关于另一个刚性部分的平移,
11.根据前述权利要求中任一项所述的方法,其中,确定完整性的状态的步骤包括:
12.根据权利要求1至11中任一项所述的方法,其中,所述约束包括:
13.根据权利要求12所述的方法,其中,所述共面度公差界限规定每个点与由另一点定义的平面之间的距离小于或等于0.5mm。
14.根据权利要求1至11中任一项所述的方法,其中,所述主设备包括旋转接头,其中,所述约束包括:
15.根据权利要求1至11中任一项所述的方法,其中,所述主设备包括移动接头,其中,所述约束包括:
16.根据权利要求1至11中任一项所述的方法,其中,所述约束包括:
17.根据权利要求16所述的方法,其中,所述平行度可接受性界限由所述轴线(z1,z2)定义的角的最大可接受界限8°来定义。
18.根据权利要求1至11中任一项所述的方法,其中,所述约束包括:
19.根据权利要求18所述的方法,其中,对于具有旋转接头的主设备,所述最大允许距离是1cm,对于具有移动接头的主设备,所述最大允许距离等于所述两个点之间的距离减去0.5cm的裕度。
20.根据权利要求1至11中任一项所述的方法,其中,所述约束包括:
21.根据权利要求1至11中任一项所述的方法,其中,凭借提供12个自由度执行的测量来实时检测或计算所述约束的所有量,所述12个自由度中的5个自由度是冗余的,
22.根据前述权利要求中任一项所述的方法,其中,所有所述约束被考虑用于完整性验证。
23.根据前述权利要求中任一项所述的方法,所述方法还包括步骤:基于所检测到的量计算以下参数:
24.根据前述权利要求中任一项所述的方法,其中,待验证的所述约束为:
25.根据前述权利要求中任一项所述的方法,其中,验证所述主设备的所述结构完整性。
26.根据前述权利要求中任一项所述的方法,其中,通过进一步包括检测/量化与检测的瞬时位置向量相关联的噪声以了解是否存在由外部磁场引起的扰动,和/或定义瞬时可接受性阈值的步骤,来执行验证所述主设备的所述功能完整性的步骤。
27.一种用于管理主设备的异常的方法,所述方法包括执行根据权利要求1至25中任一项所述的用于验证所述结构完整性的所述方法。
28.根据权利要求27所述的方法,所述方法还包括以下步骤:
29.一种机器人系统,所述机器人系统用于医疗或外科远程操作,所述机器人系统包括:
30.根据权利要求29所述的机器人系统,其中,所述控制单元可操作地连接到一个或多个传感器(s1、s2),所述一个或多个传感器被配置为执行所述检测和/或测量步骤;
31.根据权利要求29或30所述的机器人系统,其中,所述测量和/或检测步骤包括:关于第一参考系(x,y,z)测量和/或检测所述位置向量和所述取向以及随时间的相关的演变,所述第一参考系与用于外科或医疗远程操作的所述机器人系统相关联并且在预设点处具有预定的轴线和原点。
32.根据权利要求31所述的机器人系统,所述机器人系统还包括至少一个追踪系统,所述至少一个追踪系统适合于在预定追踪体积内检测所述主设备的输入位置和取向,使得所述从手术器械的致动取决于所述外科医生通过所述主设备给出的所述手动命令和/或所述主设备的位置和取向。
33.根据权利要求31或32所述的机器人系统,其中,所述测量和/或检测步骤由两个或更多个磁传感器来执行,所述两个或更多个磁传感器中的每个磁传感器布置在属于所述主设备或与所述主设备集成的所述至少两个点中的相应一个点处,并且被配置为检测由被约束到所述系统的一部分的磁场发生器所生成的磁场的相应局部值,其中,所述第一参考系源自于所述磁发射器,所述第一参考系包括三个正交轴线(x,y,z),其中,优选地,所述磁场发生器属于所述追踪系统。
34.根据权利要求31或32所述的机器人系统,所述机器人系统还包括至少一个光学传感器或摄像头,所述至少一个光学传感器或摄像头与用于远程操作手术的所述机器人系统相关联和/或受约束于用于远程操作手术的所述机器人系统,其中,所述测量和/或检测步骤由所述至少一个光学传感器或摄像头来执行,其中,所述第一参考系是所述光学传感器或摄像头的内部参考系,其中,优选地,所述光学传感器或摄像头属于所述追踪系统。
35.根据前述权利要求中任一项所述的机器人系统,其中,属于所述主设备或与所述主设备集成的所述至少两个点包括:
36.根据权利要求29至35中任一项所述的机器人系统,其中,所述主设备包括主体,所述主体包括两个刚性部分(b1、b2;1380、1390;1480、1490;1580、1590;1680、1690),所述两个刚性部分被约束为关于公共轴线相对旋转,其中,由所述外科医生给出的命令与所述两个刚性部分之间的张开角的变化对应,其中,所述系统被配置为执行另一步骤:基于前述检测到的向量,计算参考点的三个数字的位置集合和三个数字的旋转集合和所述主设备的所述张开角,其中,所述参考点包括以下点中的一个点:两个末端之间的中点、和/或主设备重心、和/或主设备接头。
37.根据权利要求29至35中任一项所述的机器人系统,其中,所述主设备包括两个刚性部分(1180;1190),所述两个刚性部分被约束为在与主设备主体的纵向延伸部一致的方向上关于彼此平移,所述两个刚性部分在围绕所述主设备主体的所述纵向延伸部的旋转中彼此是集成一体的,其中,由所述外科医生给出的命令对应于所述刚性部分关于另一个刚性部分的平移,其中,所述系统被配置为执行另一步骤:基于前述检测到的向量,计算与第一刚性部分上的第一参考点相关联的第一传感器和与第二刚性部分上的第二参考点相关联的第二传感器的三个数字的位置集合和三个数字的旋转集合。
38.根据权利要求29至37中任一项所述的机器人系统,其中,确定完整性的状态的步骤包括:
39.根据权利要求29至38中任一项所述的机器人系统,其中,所述约束包括:在共面度公差界限内,与所述至少两个点相对应的检测点(p1,p2)需要位于同一平面上,所述至少两个点的位置向量被测量或检测,
40.根据权利要求29至39中任一项所述的机器人系统,所述机器人系统还被配置为执行步骤:基于所检测到的量计算以下参数:
41.根据权利要求29至40中任一项所述的机器人系统,所述机器人系统被配置为基于所述约束中的一个或多个约束,验证所述主设备的所述结构完整性。
42.根据权利要求41所述的机器人系统,其中,通过进一步包括检测/量化与检测的瞬时位置向量相关联的噪声以了解是否存在由外部磁场引起的扰动,和/或定义瞬时可接受性阈值的步骤,来执行验证所述主设备的所述功能完整性的步骤。
43.根据权利要求32和权利要求41或42中任一项所述的机器人系统,所述机器人系统还被配置为检测由所述追踪系统生成的电磁追踪场的干扰和/或扭曲。
44.根据权利要求29至43中任一项所述的机器人系统,所述机器人系统被配置为执行根据权利要求1至26中任一项所述的用于验证主设备的所述结构完整性的方法。
45.根据权利要求29至43中任一项所述的机器人系统,所述机器人系统还被配置为管理主设备的异常,管理主设备的异常包括执行根据权利要求27至28中任一项所述的用于管理异常的所述方法。
技术总结
描述了一种用于验证主设备的结构和/或功能完整性的方法,该主设备是手持式的且无约束的,该方法用于控制用于医疗或外科远程操作的机器人系统,其中,这种主设备包括主体,该主体包括被约束为关于公共轴线相对旋转和/或平移的两个刚性部分。该方法包括步骤:测量和/或检测至少两个点的位置向量,该至少两个点中的每个点属于主设备的前述两个刚性部分中的相应一个刚性部分;以及测量和/或检测该至少两个位置向量随时间的演变。该方法然后包括步骤:测量和/或检测该至少两个点中的每个点的取向(表示为三个数字的相应集合),以及测量和/或检测该取向随时间的演变。定义由主设备的构造特征或结构特征施加的一个或多个约束,该一个或多个约束源自于定义主设备的状态所需的自由度的数量与检测到的信息项的数量之间的差异,其中,在主设备的完整性的情况下,每个约束与需要遵守的数学关系相关联。该方法然后包括步骤:基于前述检测和/或测量的位置向量和取向以及随时间的相应的演变,计算与所定义的每个约束相关联的数学关系;以及基于对是否遵守与所定义的每个约束相关联的数学关系的验证,利用所检测到的、与关于确定主设备的状态所需的信息冗余的自由度相关的信息,最终确定主设备的功能/结构完整性或非完整性的状态。还描述了一种用于医疗或外科远程操作的主从式机器人系统,该主从式机器人系统被配备为执行前述方法。
技术研发人员:伊曼纽尔·鲁法尔第,马西米利亚诺·思米
受保护的技术使用者:医疗显微器具股份公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!