医疗超声检测机器人的制作方法
本发明涉及超声检测,具体为医疗超声检测机器人。
背景技术:
1、以往做超声项目,患者必须在医院,与医生面对面进行诊疗。而5g远程超声机器人项目,则分为医生端和患者端两部分。利用远程技术,市区医院的医生可以远程为区县、乡村患者远程进行诊疗。该项目的布局实施,将为县域或乡村患者就医提供便利。同时,通过建立线上远程会诊中心等方式,实现医疗资源下沉及推动分级诊疗,对更多人群疾病早筛提供条件。
2、做b超涂的凝胶是一种医用耦合剂,具有润滑的作用,涂抹凝胶可以使b超探头和皮肤平滑的连接在一起,避免空气和皮肤之间出现缝隙,提高检查效率。同时还可以减少b超探头对身体的摩擦,缓解不适。
3、现有技术的5g远程超声机器人是利用机械手带动超声探头在人体上移动,以实现对人体的超声检测,但是在检测过程中需要医护人员在一旁对人体的待检测部位涂抹凝胶,5g远程超声机器人不能自动的实现对凝胶的涂抹,远程医生不能自主的控制凝胶的涂抹,这样一来,由于部分患者检测的时间较长,每隔一定的时间就需要人工涂抹一次凝胶,还有部分患者需要检测多个部位,远程医生需要不断的沟通涂抹凝胶的时间和位置,使患者一旁的医护人员的工作异常忙碌。为此,我们提出了一种医疗超声检测机器人。
技术实现思路
1、本发明的目的在于提供医疗超声检测机器人,以解决上述背景技术中提出的问题。
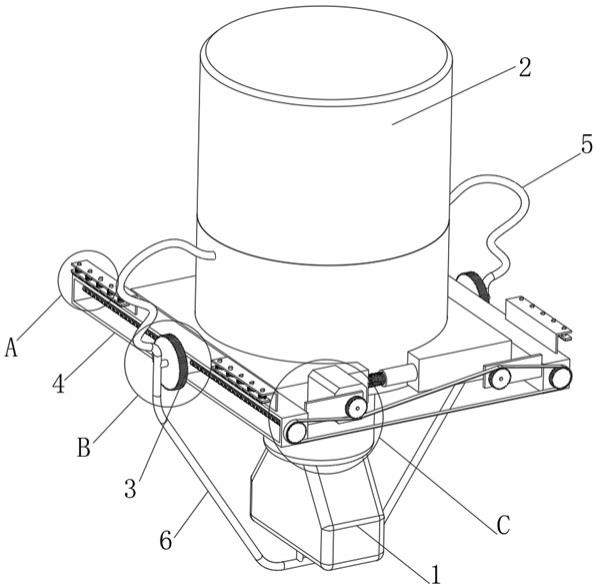
2、为实现上述目的,本发明提供如下技术方案:医疗超声检测机器人,包括超声探头、安装壳、旋转装置、移动装置、打凝胶装置、凝胶管和涂覆管,所述超声探头固定在安装壳的底部,且超声探头包括有数据线,并通过数据线与外接超声设备连接,所述安装壳固定在机械手的输出端,所述凝胶管位于超声探头的外侧,且靠近超声探头底部的外侧固定有涂覆管,所述涂覆管与凝胶管连通,所述移动装置用于带动涂覆管在超声探头的底部移动,所述旋转装置用于带动凝胶管转动至超声探头上方,所述打凝胶装置用于向凝胶管内打入凝胶。
3、优选的,所述移动装置包括连接件、传动装置和驱动装置,所述传动装置平行设置有两个,所述传动装置包括传动框、传动块、第一齿轮和第一丝杆,所述传动框通过连接件固定在安装壳上,所述第一丝杆的两端分别通过轴承与传动框转动连接,所述第一齿轮与第一丝杆的一端固定,所述驱动装置用于驱动两个传动装置上的第一齿轮转动,所述传动块与传动框的内壁滑动连接,所述传动块的中部设有螺纹孔,且传动块通过螺纹孔与第一丝杆螺纹连接,所述旋转装置固定在传动块上,所述凝胶管与旋转装置的输出端连接。
4、优选的,所述连接件包括第一连接块、第二连接块、螺纹筒和第二丝杆,所述第一连接块和第二连接块分别夹持在安装壳的外侧,所述第二丝杆固定在第一连接块上,所述螺纹筒与第二丝杆螺纹连接,所述螺纹筒通过轴承与第二连接块转动连接。
5、优选的,所述驱动装置包括驱动电机、第二齿轮、安装板和齿轮链,所述第二齿轮通过齿轮链与第一齿轮传动连接,且第二齿轮与驱动电机的输出轴固定,所述驱动电机固定在安装板上,所述安装板固定在传动框上。
6、优选的,所述旋转装置包括两个动力装置和四个同步装置,两个所述动力装置分别位于传动装置的两个传动块上,四个所述同步装置分别位于两个传动框的两端。
7、优选的,所述动力装置包括旋转轴和第三齿轮,所述旋转轴的一端通过轴承与传动块转动连接,所述第三齿轮固定套接在旋转轴上,所述凝胶管的两端分别固定在两个旋转轴上。
8、优选的,所述同步装置包括l型板、齿板和缓冲件,所述l型板的一端固定在传动框的顶部,所述齿板通过缓冲件固定在l型板上,所述齿板的齿部向下设置。
9、优选的,所述缓冲件包括缓冲弹簧和限位轴,所述缓冲弹簧的一端与l型板固定,另一端与齿板固定,所述限位轴的一端与齿板固定,另一端贯穿l型板,且与l型板滑动连接。
10、优选的,所述打凝胶装置包括凝胶容器、第一软管、第二软管和泵组件,所述凝胶容器和泵组件均固定在安装壳内,所述第一软管的一端与凝胶容器的底部连通,另一端与泵组件的输入端连接,所述第二软管的一端与泵组件的输出端连接,另一端与凝胶管连通。
11、与现有技术相比,本发明的有益效果是:
12、1、本发明超声机器人可以自动的实现对凝胶的涂抹,远程医生可以自主的控制凝胶的涂抹,减轻了患者一旁的医护人员的工作负担。
13、2、本发明凝胶管转动的过程中绕过传动框的两端,转动至超声探头的上方,使凝胶管不影响超声探头对人体的检测工作。
技术特征:
1.医疗超声检测机器人,其特征在于:包括超声探头(1)、安装壳(2)、旋转装置(3)、移动装置(4)、打凝胶装置(5)、凝胶管(6)和涂覆管(7),所述超声探头(1)固定在安装壳(2)的底部,且超声探头(1)包括有数据线(8),并通过数据线(8)与外接超声设备连接,所述安装壳(2)固定在机械手的输出端,所述凝胶管(6)位于超声探头(1)的外侧,且靠近超声探头(1)底部的外侧固定有涂覆管(7),所述涂覆管(7)与凝胶管(6)连通,所述移动装置(4)用于带动涂覆管(7)在超声探头(1)的底部移动,所述旋转装置(3)用于带动凝胶管(6)转动至超声探头(1)上方,所述打凝胶装置(5)用于向凝胶管(6)内打入凝胶。
2.根据权利要求1所述的医疗超声检测机器人,其特征在于:所述移动装置(4)包括连接件(9)、传动装置(10)和驱动装置(11),所述传动装置(10)平行设置有两个,所述传动装置(10)包括传动框(15)、传动块(16)、第一齿轮(17)和第一丝杆(18),所述传动框(15)通过连接件(9)固定在安装壳(2)上,所述第一丝杆(18)的两端分别通过轴承与传动框(15)转动连接,所述第一齿轮(17)与第一丝杆(18)的一端固定,所述驱动装置(11)用于驱动两个传动装置(10)上的第一齿轮(17)转动,所述传动块(16)与传动框(15)的内壁滑动连接,所述传动块(16)的中部设有螺纹孔,且传动块(16)通过螺纹孔与第一丝杆(18)螺纹连接,所述旋转装置(3)固定在传动块(16)上,所述凝胶管(6)与旋转装置(3)的输出端连接。
3.根据权利要求2所述的医疗超声检测机器人,其特征在于:所述连接件(9)包括第一连接块(19)、第二连接块(20)、螺纹筒(21)和第二丝杆(22),所述第一连接块(19)和第二连接块(20)块分别夹持在安装壳(2)的外侧,所述第二丝杆(22)固定在第一连接块(19)上,所述螺纹筒(21)与第二丝杆(22)螺纹连接,所述螺纹筒(21)通过轴承与第二连接块(20)块转动连接。
4.根据权利要求3所述的医疗超声检测机器人,其特征在于:所述驱动装置(11)包括驱动电机(23)、第二齿轮(24)、安装板(25)和齿轮链(26),所述第二齿轮(24)通过齿轮链(26)与第一齿轮(17)传动连接,且第二齿轮(24)与驱动电机(23)的输出轴固定,所述驱动电机(23)固定在安装板(25)上,所述安装板(25)固定在传动框(15)上。
5.根据权利要求4所述的医疗超声检测机器人,其特征在于:所述旋转装置(3)包括两个动力装置(27)和四个同步装置(28),两个所述动力装置(27)分别位于传动装置(10)的两个传动块(16)上,四个所述同步装置(28)分别位于两个传动框(15)的两端。
6.根据权利要求5所述的医疗超声检测机器人,其特征在于:所述动力装置(27)包括旋转轴(29)和第三齿轮(30),所述旋转轴(29)的一端通过轴承与传动块(16)转动连接,所述第三齿轮(30)固定套接在旋转轴(29)上,所述凝胶管(6)的两端分别固定在两个旋转轴(29)上。
7.根据权利要求6所述的医疗超声检测机器人,其特征在于:所述同步装置(28)包括l型板(31)、齿板(32)和缓冲件(33),所述l型板(31)的一端固定在传动框(15)的顶部,所述齿板(32)通过缓冲件(33)固定在l型板(31)上,所述齿板(32)的齿部向下设置。
8.根据权利要求7所述的医疗超声检测机器人,其特征在于:所述缓冲件(33)包括缓冲弹簧(34)和限位轴(35),所述缓冲弹簧(34)的一端与l型板(31)固定,另一端与齿板(32)固定,所述限位轴(35)的一端与齿板(32)固定,另一端贯穿l型板(31),且与l型板(31)滑动连接。
9.根据权利要求8所述的医疗超声检测机器人,其特征在于:所述打凝胶装置(5)包括凝胶容器、第一软管(36)、第二软管(37)和泵组件(38),所述凝胶容器和泵组件(38)均固定在安装壳(2)内,所述第一软管(36)的一端与凝胶容器的底部连通,另一端与泵组件(38)的输入端连接,所述第二软管(37)的一端与泵组件(38)的输出端连接,另一端与凝胶管(6)连通。
技术总结
本发明公开了医疗超声检测机器人,包括超声探头、安装壳、旋转装置、移动装置、打凝胶装置、凝胶管和涂覆管,所述超声探头固定在安装壳的底部,且超声探头包括有数据线,并通过数据线与外接超声设备连接,所述安装壳固定在机械手的输出端,所述凝胶管位于超声探头的外侧,且靠近超声探头底部的外侧固定有涂覆管,所述涂覆管与凝胶管连通,所述移动装置用于带动涂覆管在超声探头的底部移动,所述旋转装置用于带动凝胶管转动至超声探头上方,所述打凝胶装置用于向凝胶管内打入凝胶,此医疗超声检测机器人,可以自动的实现对凝胶的涂抹,远程医生可以自主的控制凝胶的涂抹,减轻了患者一旁的医护人员的工作负担。
技术研发人员:李奇轩
受保护的技术使用者:李奇轩
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!