小尺度多腔道内窥镜连续体机械臂结构及制造方法
本发明涉及连续体手术机器人领域,具体地,涉及小尺度多腔道内窥镜连续体机械臂结构及制造方法。
背景技术:
1、目前,随着微创手术的发展,柔性内窥镜连续体机械臂在医疗器械领域得到越来越广泛的应用,尤其在人体腔道介入和脏器微创手术中,连续体机械臂凭借其结构微小紧凑、柔顺性高、灵活易控制等特性,相比于传统的刚性手术器械具备较大的优越性,能有效减少与人体内器官、组织的接触碰撞,减少对身体的伤害并精确定位病灶位置。
2、聚合物连续体机械臂在柔性手术机器人中尚比较少见,其通过在管状多腔聚合物的外壁上切除一定的材料,形成一个单一整体性的柔性器械。相比于传统铰链式蛇骨连续体机构(申请号为cn109895073a的中国专利,公开了“一种片弹簧驱动的连续体机器人;申请号为cn111230845b的中国专利,公开了“一种拉弯型连续体机器人单元及机器人”),本专利提出的连续体机械臂可以通过单一材料一体化制造,并通过驱动丝的拉伸收缩来完成整体的弯曲和偏转,具备零部件数量少、装配过程简易、连续体机械臂内部弯曲摩擦小等优势。因此,挤出的连续体更适合用于制造小尺寸(3mm外径及以下)以及多个大内腔的手术器械,可以保证器械在人体腔道内有效弯曲偏转的同时,具备较大的内部腔道以通入探针和活检钳等其他检测工具。
3、目前的微创手术中往往需要柔性内窥镜连续体机械臂同时用多个手术器械对病灶区域进行手术操作,比如径向支气管超声探头和基于探头式的共聚焦显微内镜两种器械对病灶进行联合诊断,因此,在临床上使用双探头的内窥镜连续体机械臂具有较大的必要性。但是目前的内窥镜还没有在小直径的前提下(3mm)左右,实现多个大直径的内部腔道。这样的结构能实现上述的临床需求,因而这两方面的保证可以整体上提高医疗器械在病灶区域的操作、定位精度,从而提高手术过程的安全性和成功率。因此急需开发一种能同时保证双器械腔道,同时能提供多种感知能力的易于驱动和制造的小尺度多腔道的柔性内窥镜连续体机械臂。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种小尺度多腔道内窥镜连续体机械臂结构及制造方法。
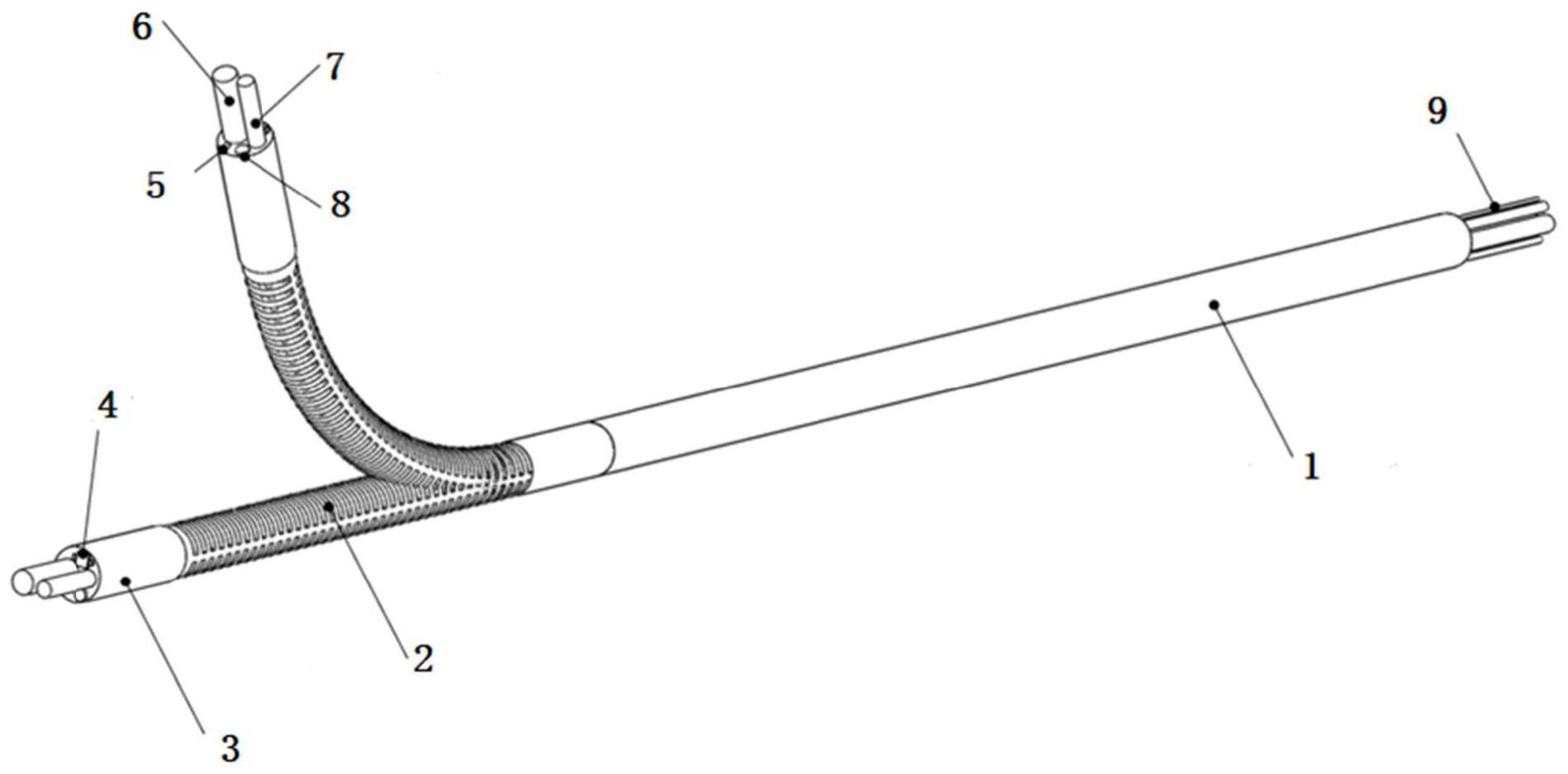
2、根据本发明提供的一种小尺度多腔道内窥镜连续体机械臂结构,包括近端运动传递段、远端柔性弯曲段、顶端座、相机和led、光纤、电磁传感器以及驱动丝,顶端座连接于远端柔性弯曲段上,远端柔性弯曲段连接于近端运动传递段上,驱动丝固定于远端柔性弯曲段上,相机和led、电磁传感器以及光纤固定在顶端座上;
3、远端柔性弯曲段通过拉动驱动丝实现弯曲,近端运动传递段将驱动丝的拉力传递给远端柔性弯曲段。
4、优选的,近端运动传递段内设有传感器通道、第一器械通道、驱动丝通道一以及第二器械通道,传感器通道内通过相机线和驱动丝,驱动丝通道一内分别通过光纤、电磁线以及驱动丝,第一器械通入第一器械通道中,第二器械通入第二器械通道中。
5、优选的,远端柔性弯曲段包括中间圆盘、槽型切口、弯曲微梁以及基座,弯曲微梁连接于基座上,基座连接近端运动传递段,弯曲微梁连接中间圆盘,中间圆盘上设有槽型切口;
6、当驱动丝长度收缩,中间圆盘在一侧靠紧,弯曲微梁弯曲。
7、优选的,槽型切口对称分布于远端柔性弯曲段两侧,远端柔性弯曲段的弯曲角度通过槽型切口尺寸进行调节。
8、优选的,驱动丝分别分布于弯曲微梁两侧,弯曲微梁位于远端柔性弯曲段中间位置。
9、优选的,顶端座包括器械通道二、电磁探头通道、光纤传感器通道、器械通道一以及相机通道,器械通道一与远端柔性弯曲段的器械通道三对齐连接,器械通道二与远端柔性弯曲段的器械通道四对齐连接,电磁传感器的探头连接于电磁探头通道内,光纤的传感器末端连接于光纤传感器通道内,相机和led连接于相机通道内。
10、优选的,远端柔性弯曲段还包括器械通道三、光纤通道、驱动丝通道二、电磁线通道、器械通道四以及相机线通道,第一器械通入器械通道三中,光纤通过光纤通道,电磁线通入电磁线通道内,驱动丝通入驱动丝通道二内,第二器械通入器械通道四内,相机线通入相机线通道内。
11、优选的,外部驱动力拉动驱动丝时,驱动丝在驱动丝通道二内滑动,受力的一侧驱动丝相对于远端柔性弯曲段的长度缩短,另一侧驱动丝长度被伸长。
12、优选的,相机和led分别与相机通道、相机线通道以及传感器通道间隙配合,光纤分别与光纤传感器通道、光纤通道以及驱动丝通道一间隙配合,第一器械分别与器械一通道、器械通道三以及第一器械通道间隙配合,第二器械分别与器械二通道、器械通道四以及第二器械通道间隙配合,电磁传感器分别与电磁探头通道、电磁线通道以及传感器通道间隙配合,驱动丝分别与驱动丝通道二以及驱动丝通道一间隙配合。
13、一种小尺度多腔道内窥镜连续体机械臂结构的制备方法,包括如下步骤:
14、s1、放置在挤出主机里的毫米级别的聚合物颗粒通过加热吹气到模具,模具挤出特定尺寸截面的管状聚合物;
15、s2、然后经过冷却水槽对热塑性管状聚合物进行冷却,由牵引机牵引冷却后的挤出管状物,最后对其进行切断;
16、s3、通过cnc切槽对远端柔性弯曲段铣削加工或者激光切割,去除多余的材料,形成槽型切口;
17、s4、将相机和led、光纤、第一器械、第二器械、电磁传感器以及驱动丝分别间隙配合于近端运动传递段、远端柔性弯曲段以及顶端座中。
18、与现有技术相比,本发明具有如下的有益效果:
19、(1)本发明通过挤出成型与机械加工或激光加工方式制造连续体机械臂,形成一个一体化的整体性的柔性连续体机械臂,相比于需要装配而成的连续体机械臂结构具有部件数量少,装配过程简单,内部弯曲产生的摩擦小等优点;
20、(2)本发明挤出成型制造的连续体机械臂结构能够解决在小直径的基础上实现大的内部腔道的技术难题,因为挤出成型能够实现多个独立腔道保持极其薄的壁厚,每个独立腔道只有一层壁厚,因此减小了连续体机械臂结构的外径尺寸,同时实现多个尽可能大的内部腔道;
21、(3)本发明在提供两个器械腔道的基础上,该连续体机械臂结构还集成有感知能力,通过在剩下的腔道里放置形状传感器和电磁定位传感器,可以解决重建绝对形状的难题,这样柔性内窥镜在人体解剖腔道的实时的绝对形状便可以重建出来;
22、(4)本发明通过调整切槽的尺寸和形状,可以对连续体机械臂结构的柔性和刚度进行优化设计,进而能够保证连续体机械臂结构具有足够大的角度还能具有较大的刚度;
23、(5)本发明通过推导连续体机械臂结构单节的静力学模型,再通过坐标变换,求得整个连续体机械臂结构末端的位置和姿态;
24、(6)本发明能够实现两个手术器械同时操作,实现器械之间的协作与配合,能够提高手术效率,同时多个腔道能够提供形状感知与电磁导航能力,提高手术操作的精度。
技术特征:
1.一种小尺度多腔道内窥镜连续体机械臂结构,其特征在于,包括近端运动传递段(1)、远端柔性弯曲段(2)、顶端座(3)、相机和led(4)、光纤(5)、电磁传感器(8)以及驱动丝(9),所述顶端座(3)连接于所述远端柔性弯曲段(2)上,所述远端柔性弯曲段(2)连接于所述近端运动传递段(1)上,所述驱动丝(9)固定于所述远端柔性弯曲段(2)上,所述相机和led(4)、所述电磁传感器(8)以及所述光纤(5)固定在所述顶端座(3)上;
2.根据权利要求1所述的小尺度多腔道内窥镜连续体机械臂结构,其特征在于,所述近端运动传递段(1)内设有传感器通道(101)、第一器械通道(102)、驱动丝通道一(103)以及第二器械通道(104),所述传感器通道(101)内通过相机线(105)和所述驱动丝(9),所述驱动丝通道一(103)内分别通过所述光纤(5)、电磁线(8)以及所述驱动丝(9),所述第一器械通道(102)中通入第一器械(6),所述第二器械通道(104)中通入第二器械(7)。
3.根据权利要求2所述的小尺度多腔道内窥镜连续体机械臂结构,其特征在于,所述远端柔性弯曲段(2)包括中间圆盘(201)、槽型切口(202)、弯曲微梁(203)以及基座(204),所述弯曲微梁(203)连接于所述基座(204)上,所述基座(204)连接所述近端运动传递段(1),所述弯曲微梁(203)连接所述中间圆盘(201),所述中间圆盘(201)上设有所述槽型切口(202);
4.根据权利要求3所述的小尺度多腔道内窥镜连续体机械臂结构,其特征在于,所述槽型切口(202)对称分布于所述远端柔性弯曲段(2)两侧,所述远端柔性弯曲段(2)的弯曲角度通过所述槽型切口(202)尺寸进行调节。
5.根据权利要求3所述的小尺度多腔道内窥镜连续体机械臂结构,其特征在于,所述驱动丝(9)分别分布于所述弯曲微梁(203)两侧,所述弯曲微梁(203)位于所述远端柔性弯曲段(2)中间位置。
6.根据权利要求2所述的小尺度多腔道内窥镜连续体机械臂结构,其特征在于,所述顶端座(3)包括器械通道二(301)、电磁探头通道(302)、光纤传感器通道(303)、器械通道一(304)以及相机通道(305),所述器械通道一(304)与所述远端柔性弯曲段(2)的器械通道三(205)对齐连接,所述器械通道二(301)与所述远端柔性弯曲段(2)的器械通道四(209)对齐连接,所述电磁传感器(8)的探头连接于所述电磁探头通道(302)内,所述光纤(5)的传感器末端连接于所述光纤传感器通道(303)内,所述相机和led(4)连接于所述相机通道(305)内。
7.根据权利要求6所述的小尺度多腔道内窥镜连续体机械臂结构,其特征在于,所述远端柔性弯曲段(2)还包括器械通道三(205)、光纤通道(206)、驱动丝通道二(207)、电磁线通道(208)、器械通道四(209)以及相机线通道(210),所述第一器械(6)通入所述器械通道三(205)中,所述光纤(5)通过所述光纤通道(206),所述电磁线(8)通入所述电磁线通道(208)内,所述驱动丝(9)通入所述驱动丝通道二(207)内,所述第二器械(7)通入所述器械通道四(209)内,所述相机线(105)通入所述相机线通道(210)内。
8.根据权利要求7所述的小尺度多腔道内窥镜连续体机械臂结构,其特征在于,外部驱动力拉动所述驱动丝(9)时,所述驱动丝(9)在所述驱动丝通道二(207)内滑动,受力的一侧所述驱动丝(9)相对于所述远端柔性弯曲段(2)的长度缩短,另一侧所述驱动丝(9)长度被伸长。
9.根据权利要求7所述的小尺度多腔道内窥镜连续体机械臂结构,其特征在于,所述相机和led(4)分别与相机通道(305)、相机线通道(210)以及传感器通道(101)间隙配合,所述光纤(5)分别与光纤传感器通道(303)、光纤通道(206)以及驱动丝通道一(103)间隙配合,所述第一器械(6)分别与器械一通道(304)、器械通道三(205)以及第一器械通道(101)间隙配合,所述第二器械(7)分别与器械二通道(301)、器械通道四(209)以及第二器械通道(104)间隙配合,所述电磁传感器(8)分别与所述电磁探头通道(302)、电磁线通道(208)以及传感器通道(101)间隙配合,所述驱动丝(9)分别与驱动丝通道二(207)以及驱动丝通道一(103)间隙配合。
10.一种根据权利要求1-9任一项所述的小尺度多腔道内窥镜连续体机械臂结构的制备方法,其特征在于,包括如下步骤:
技术总结
本发明提供了一种涉及连续体手术机器人领域的小尺度多腔道内窥镜连续体机械臂结构及制造方法,包括近端运动传递段、远端柔性弯曲段、顶端座、相机和LED、光纤、第一器械、第二器械、电磁传感器以及驱动丝,顶端座连接于远端柔性弯曲段上,远端柔性弯曲段连接于近端运动传递段上,驱动丝固定于远端柔性弯曲段上,相机和LED、电磁传感器以及光纤固定在顶端座上,远端柔性弯曲段通过拉动驱动丝实现弯曲,近端运动传递段将驱动丝的拉力传递给远端柔性弯曲段。本发明能够实现小尺度多腔道连续体机械臂的跨尺度制造方法,同时为小尺度内窥镜提供多个大直径内部器械腔道,实现器械之间的协作与配合,提高手术效率和精度,还能提供形状感知与电磁导航能力。
技术研发人员:陈卫东,艾孝杰,高安柱
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!