用于控制手术机器人的操作手
本公开涉及医疗器械,更具体地,涉及一种用于控制手术机器人的操作手。
背景技术:
1、经自然腔道手术(notes)机器人系统是临床手术技术、机器人技术、计算机技术等多学科协同发展的产物。主操作手作为notes手术机器人系统的重要组成部分,在手术操作中起着至关重要的作用。
2、现今已有的通用型主手或者腹腔镜手术机器人的操作手在手术过程中,若医生因各种突发情况而需要暂停手术时,操作手若不能实现锁止,则可能发生医生或他人误操作该操作手造成手术机器人在人体内部发生动作,从而对手术的安全性造成影响。
技术实现思路
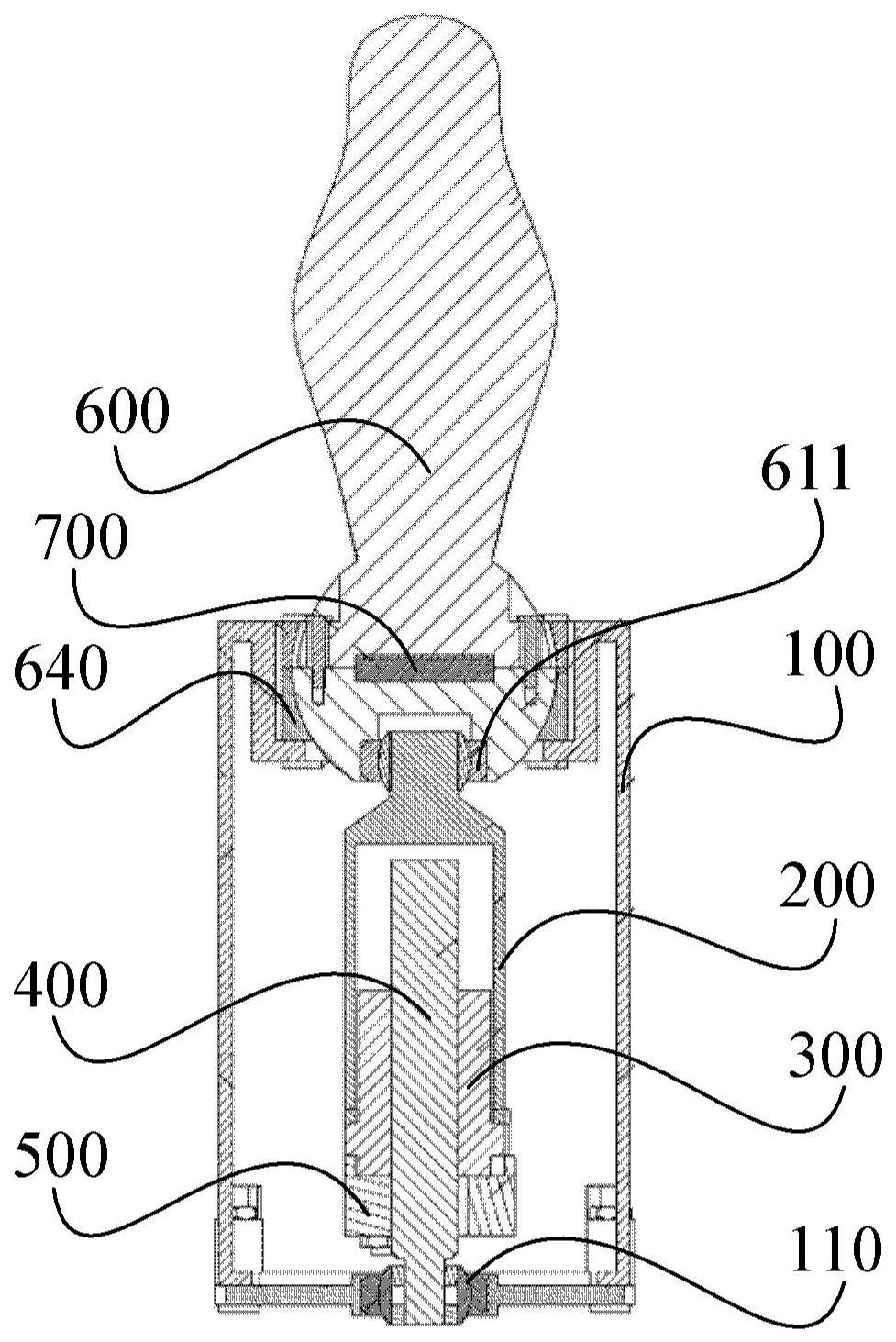
1、有鉴于此,本公开实施例提供了一种用于控制手术机器人的操作手,包括:
2、第一外壳,其中,上述第一外壳的顶面设置有第一通孔;
3、第二外壳,安装在上述第一外壳内;
4、滚珠螺母,安装在上述第二外壳的底端;
5、丝杠,与上述滚珠螺母螺接,上述丝杠的底端可转动地安装在上述第一外壳的底面;
6、磁吸式锁止装置,安装在上述滚珠螺母上,上述磁吸式锁止装置被构造成在通电的情况下将上述丝杠抱紧,以阻止上述丝杠的转动;
7、球式操作手,通过上述第一通孔可转动地安装在上述第二外壳上;
8、其中,在上述球式操作手的角度发生改变的情况下,对上述手术机器人的工作状态进行控制。
9、根据本公开的实施例,上述磁吸式锁止装置包括:
10、固定部,安装在上述滚珠螺母上;
11、活动部,上述活动部的第一端通过枢轴与上述固定部可转动地连接;
12、电磁铁,安装在上述活动部的第二端,上述电磁铁被构造成在通电的情况下对上述固定部进行吸附,以改变上述固定部与上述活动部之间的夹角,使得上述丝杠的转动被限制。
13、根据本公开的实施例,上述固定部和上述活动部中的任一个包括:
14、夹紧块,上述夹紧块朝向上述丝杠的一侧设置有与上述丝杠配合的弧形开口;
15、其中,上述固定部的夹紧块上设置有与上述电磁铁配合的金属片。
16、根据本公开的实施例,上述球式操作手包括:
17、球形部,上述球形部上设置有凹槽,上述凹槽被构造成与上述第二外壳可转动地连接,其中,在上述球形部发生旋转的情况下,对上述手术机器人的工作状态进行控制;
18、连接部,一端安装在上述球形部上;
19、操作部,与上述连接部的另一端连接,上述操作部适用于改变上述球形部的旋转角度。
20、根据本公开的实施例,上述凹槽通过第一关节轴承与上述第二外壳可转动地连接。
21、根据本公开的实施例,上述球形部中安装有陀螺仪,上述陀螺仪被构造成采集上述球形部的旋转角度。
22、根据本公开的实施例,操作手还包括:
23、环形支座,安装在上述第一通孔处的上述第一外壳侧壁上,上述球形部在上述支座内转动,上述支座内壁设置有与上述球形部外形相匹配的弧形端面。
24、根据本公开的实施例,操作手还包括:
25、多个控制按钮,安装在上述操作部的顶端,其中,至少一个上述控制按钮被构造成控制上述磁吸式锁止装置的通电状态,剩下的上述控制按钮被构造成控制上述手术机器人的工作状态。
26、根据本公开的实施例,上述第一外壳的底面设置有第二通孔,上述丝杠的底端通过第二关节轴承与上述第二通孔可转动地连接。
27、根据本公开的实施例,上述丝杠上的螺距大小范围为5~20mm。
28、根据本公开的实施例,通过在操作手中设置第二外壳、丝杠以及磁吸式锁止装置,能够在不需要操作手术机器人的情况下对丝杠和第二外壳的整体长度和转动进行锁止,从而避免在非手术时的错误操作使得手术机器人做出错误动作,降低了手术期间的失误风险,提高了病患的手术成功率。
技术特征:
1.一种用于控制手术机器人的操作手,其特征在于,包括:
2.根据权利要求1所述的操作手,其特征在于,所述磁吸式锁止装置包括:
3.根据权利要求2所述的操作手,其特征在于,所述固定部和所述活动部中的任一个包括:
4.根据权利要求3所述的操作手,其特征在于,所述球式操作手包括:
5.根据权利要求4所述的操作手,其特征在于,所述凹槽通过第一关节轴承与所述第二外壳可转动地连接。
6.根据权利要求4所述的操作手,其特征在于,所述球形部中安装有陀螺仪,所述陀螺仪被构造成采集所述球形部的旋转角度。
7.根据权利要求4所述的操作手,其特征在于,还包括:
8.根据权利要求1所述的操作手,其特征在于,还包括:
9.根据权利要求1所述的操作手,其特征在于,所述第一外壳的底面设置有第二通孔,所述丝杠的底端通过第二关节轴承与所述第二通孔可转动地连接。
10.根据权利要求1所述的操作手,其特征在于,其中,所述丝杠上的螺距大小范围为5~20mm。
技术总结
本公开提供了一种用于控制手术机器人的操作手,包括:第一外壳,其中,第一外壳的顶面设置有第一通孔;第二外壳,安装在第一外壳内;滚珠螺母,安装在第二外壳的底端;丝杠,与滚珠螺母螺接,丝杠的底端可转动地安装在第一外壳的底面;磁吸式锁止装置,安装在滚珠螺母上,磁吸式锁止装置被构造成在通电的情况下将丝杠抱紧,以阻止丝杠的转动;球式操作手,通过第一通孔可转动地安装在第二外壳上;其中,在球式操作手的角度发生改变的情况下,对手术机器人的工作状态进行控制。
技术研发人员:孔康,代迎凯,梁涛
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!