一种下肢康复机器人柔顺控制方法及实现装置
本发明涉及康复器械领域,具体涉及一种下肢康复机器人柔顺控制方法及实现装置。
背景技术:
1、目前,中国是全球康复需求量较大的国家,在众多康复患者中,肌肉骨骼疾病患者的数量较多。因此,国内医疗康复机器人的市场空间巨大。
2、目前所使用的康复机器人,在结构上,一般是由若干刚性连杆通过关节驱动模块连接,执行器驱动关节连杆按照控制器设定的算法运动。刚性连杆结构有利于控制关节角度达到精确定位的目的。但是,当用户使用康复机器人进行训练时,由于用户身体肌能退化等原因,肌肉痉挛的现象经常发生且难以避免,这种痉挛状态如果无法及时检测并告知治疗师,往往会导致康复机器人刚性关节拉伤用户肌肉组织,甚至发生骨折等严重的医疗事故。
3、因此,在康复机器人上加装柔顺控制十分必要。而目前实现柔顺控制的方式多为通过力传感器检测运动轨迹并反馈给计算机,使计算机控制康复机器人及时调整以更好地拟合患者的运动轨迹,该方法对于技术要求相对较高,且成本也会更高。
技术实现思路
1、针对现有技术的缺陷,本发明提供一种下肢康复机器人柔顺控制方法及实现装置,结构简单、使用方便,能够实现柔顺控制,避免患者二次受伤。
2、为了达到上述目的,本发明所采用的技术方案是:
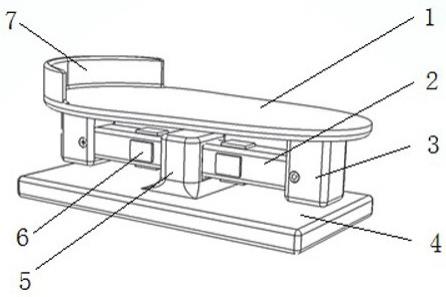
3、一种下肢康复机器人柔顺控制的实现装置,包括上踏板、底板、以及设置在踏板和底板之间的弹性梁,所述上踏板底部设有两个连接部,所述底板中部设有凸起的连接件,所述弹性梁穿过踏板底部的连接部及底板中部的连接件,将踏板和底板连接在一起,所述弹性梁上设置有应变片,用于将弹性梁的形变转化为电信号,由控制系统判断足底力变化是否处于正常范围。
4、进一步地,所述弹性梁截面为正方形,沿弹性梁的长度方向,设有两组应变片,分别位于底板连接件的两侧,每组应变片有4个,对称贴设在弹性变形梁的四个侧面上。
5、进一步地,所述上踏板和底板均采用铝合金加工而成。
6、一种下肢康复机器人的柔顺控制方法,该柔顺控制方法使用所述的实现装置对下肢康复机器人实现柔顺控制,所述实现装置作为双脚踏板安装在下肢康复机器人上,康复者站立在双脚踏板上进行康复运动,当实现装置中的上踏板受到压力时,弹性梁随之产生形变,附着在弹性梁上的应变片组将弹性梁的形变转化为电信号,当施加在踏板上的足底力发生突变时,电信号会随之异常变化,控制系统通过实时检测和判断电流信号波动是否处于正常范围,从而可以在足底力发生突变或低于正常范围时,向康复机器人发出停止信号,实现柔顺控制。
7、具体地,所述应变片连接可变电阻,弹性梁的形变转换为可变电阻的电阻变化,从而转变为电流变化,可变电阻连接触发器的输入端,触发器输出端连接下肢康复机器人的电机开关,正常运作时,触发器输出端为高电平,当踏板上的足底力突然减小或低于设定值时,可变电阻r会突然减小,触发器输入端由高电平转为低电平,输出端输出低电平,使得电机停止工作,否则,电阻值处于正常范围,输入端为高电平,输出端电平保持不变,电机正常工作。
8、有益效果:
9、1、本发明结构简单,仅通过一根弹性变形梁的形变并配合应变片组获得人机交互力的大小,通过将变形梁的形变转化为电信号,实时监测人机交互力的大小,实现柔顺控制,避免患者康复过程中二次受伤;成本较低、易于推广、后期维修成本较少。
10、2.本发明的可移植性较高,结构本身就是下肢康复机器人都会用到的踏板,可以直接安装在现有的下肢康复医疗器械上,实现柔顺控制的大范围推广,提高原有康复器械的安全性,大大降低了康复器械升级换代的成本。
技术特征:
1.一种下肢康复机器人柔顺控制的实现装置,其特征在于,包括上踏板、底板、以及设置在踏板和底板之间的弹性梁,所述上踏板底部设有两个连接部,所述底板中部设有凸起的连接件,所述弹性梁穿过踏板底部的连接部及底板中部的连接件,将踏板和底板连接在一起,所述弹性梁上设置有应变片,用于将弹性梁的形变转化为电信号,由控制系统判断足底力变化是否处于正常范围。
2.根据权利要求1所述的一种下肢康复机器人柔顺控制的实现装置,其特征在于,所述弹性梁截面为正方形,沿弹性梁的长度方向,设有两组应变片,分别位于底板连接件的两侧,每组应变片有4个,对称贴设在弹性变形梁的四个侧面上。
3.根据权利要求1所述的一种下肢康复机器人柔顺控制的实现装置,其特征在于,所述上踏板和底板均采用铝合金加工而成。
4.一种下肢康复机器人的柔顺控制方法,其特征在于,该柔顺控制方法使用权利要求1所述的实现装置对下肢康复机器人实现柔顺控制,所述实现装置作为双脚踏板安装在下肢康复机器人上,康复者站立在双脚踏板上进行康复运动,当实现装置中的上踏板受到压力时,弹性梁随之产生形变,附着在弹性梁上的应变片组将弹性梁的形变转化为电信号,当施加在踏板上的足底力发生突变时,电信号会随之异常变化,控制系统通过实时检测和判断电流信号波动是否处于正常范围,从而可以在足底力发生突变或低于正常范围时,向康复机器人发出停止信号,实现柔顺控制。
5.根据权利要求4所述的一种下肢康复机器人的柔顺控制方法,其特征在于,所述应变片连接可变电阻,弹性梁的形变转换为可变电阻的电阻变化,从而转变为电流变化,可变电阻连接触发器的输入端,触发器输出端连接下肢康复机器人的电机开关,正常运作时,触发器输出端为高电平,当踏板上的足底力突然减小或低于设定值时,可变电阻r会突然减小,触发器输入端由高电平转为低电平,输出端输出低电平,使得电机停止工作,否则,电阻值处于正常范围,输入端为高电平,输出端电平保持不变,电机正常工作。
技术总结
本发明涉及一种下肢康复机器人柔顺控制方法及实现装置,所述实现装置包括上踏板、底板、以及设置在踏板和底板之间的弹性梁,所述弹性梁穿过踏板底部的连接部及底板中部的连接件,将踏板和底板连接在一起,所述弹性梁上设置有应变片,用于将弹性梁的形变转化为电信号,当施加在踏板上的足底力发生突变时,电信号会随之异常变化,控制系统通过实时检测和判断电流信号波动是否处于正常范围,从而可以在足底力发生突变或低于正常范围时,向康复机器人发出停止信号,实现柔顺控制;结构简单、易于推广。
技术研发人员:赵萍,骆钟韬,夏雨蒙,何淼
受保护的技术使用者:合肥工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!