一种基于数字孪生内核的消杀机器人系统
本发明涉及医疗自动化,具体而言,涉及一种基于数字孪生内核的消杀机器人系统。
背景技术:
1、我国正处于医院信息化、自动化、智能化建设的高潮时期。传统的医院由于运维管理办法效率低,主观性强,自动化程度低且较为被动,已不能满足当前国家发展和人民生活的需要。高效的、智能化的医疗设备管控成了迫切的需要,这就对医院整体智能化管理和医疗设备的远程自动化控制提出了更高的要求。例如,仅仅针对医院的日常消毒杀菌这项繁琐和费时的工作,目前大多通过人工方式进行消杀,需要医护工作人员投入一定的时间和精力对医院设备或区域手动喷洒消毒杀菌液,不仅效率较低,消杀不全面,而且会增加工作人员被细菌病毒感染的风险。因此医院急需一种更加安全、效率更高的消杀方式。
技术实现思路
1、本发明的目的在于提供一种基于数字孪生内核的消杀机器人系统,其通过用户交互模块获取用户的消杀指令后,根据指令使定位导航模块通过数字孪生内核模型、全生命周期bim模型进行双模型的对比分析获得位置信息和导航信息,然后将信息传送给杀机器人模块并配合暗面判断模块,使消杀机器人移动到待消杀物体或区域处进行明面和暗面的消杀工作,可以使消杀机器人的导航定位更精确,解决了机器人自我迷失和室内导航定位不够精确的问题,方便用户可以更加精准地远程控制消杀机器人进行全面消杀作业,代替了人工消杀,从而有效提高医院消毒杀菌的效率和安全性。
2、本发明的实施例是这样实现的:
3、本申请实施例提供一种基于数字孪生内核的消杀机器人系统,包括:
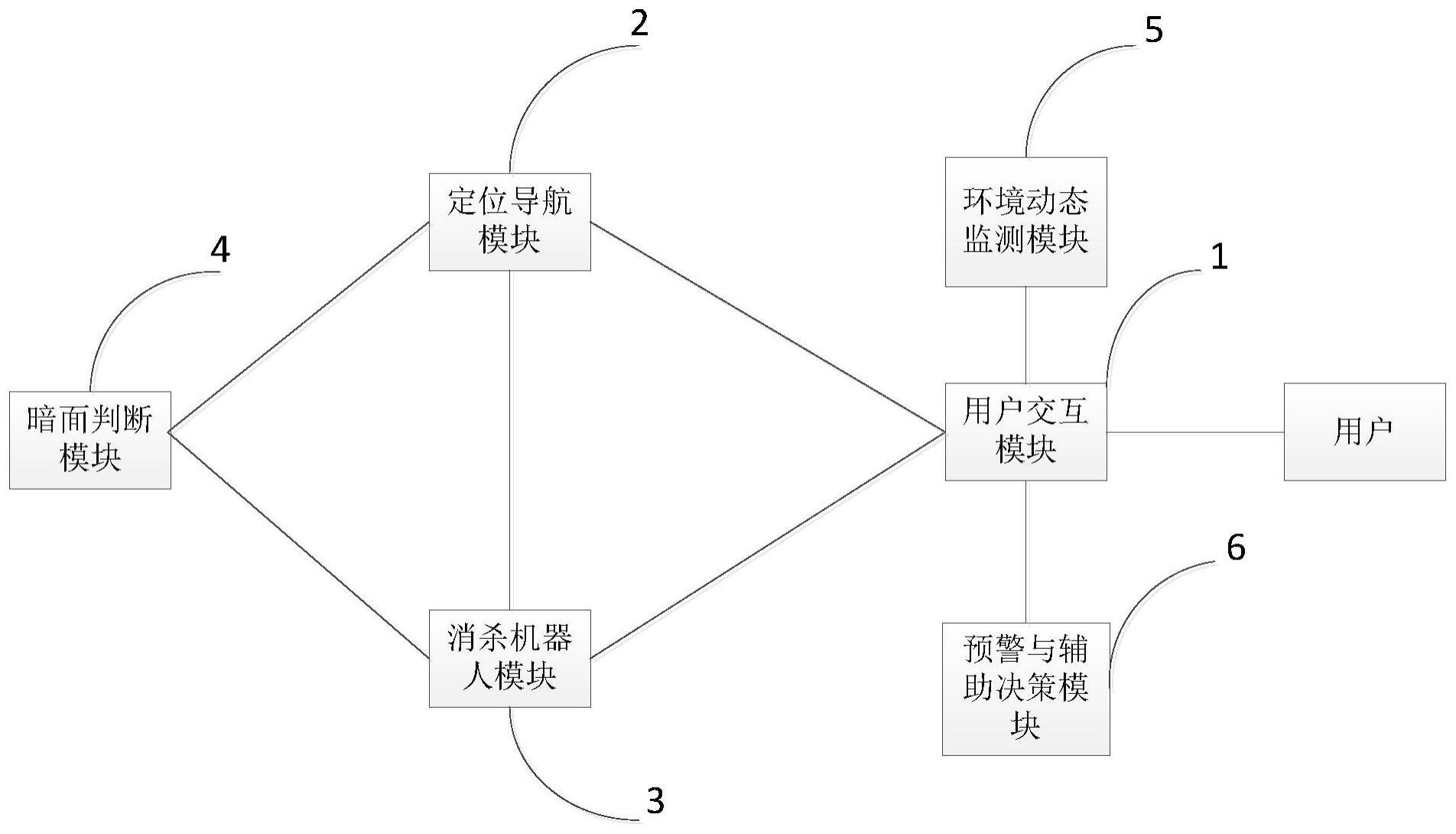
4、用户交互模块、定位导航模块和消杀机器人模块,其中,所述用户交互模块用于向用户提供和所述消杀机器人模块交互的可视化界面以及用于用户的身份权限管理、数据的存储和管理;定位导航模块用于通过数字孪生内核模型、全生命周期bim模型双模型的对比分析获得使消杀机器人模块移动的位置信息和导航信息;所述消杀机器人模块根据所述用户交互模块获取的用户消杀指令及所述定位导航模块提供的位置信息和导航信息对指定的待消杀物体或区域进行消毒杀菌。
5、在本发明的一些实施例中,所述全生命周期bim模型为通过revit构建的三维点云模型,所述数字孪生内核模型为通过unity构建的信息模型。
6、在本发明的一些实施例中,所述数字孪生内核模型包括预先设置的定位信标信息以及基于simulex分析引擎生成的导航信息,所述导航信息包括路径信息和时间信息。
7、在本发明的一些实施例中,所述系统还包括暗面判断模块,所述暗面判断模块基于所述数字孪生内核模型、所述全生命周期bim模型以及采集的现实图像信息进行堆叠对比,对待消杀物体或区域进行暗面判断,并将判断结果反馈给所述消杀机器人模块。
8、在本发明的一些实施例中,所述系统还包括环境动态监测模块,用于动态采集和监测消杀环境中的人流、设备、空气数据。
9、在本发明的一些实施例中,所述系统还包括预警与辅助决策模块,用于根据所述环境动态监测模块采集的消杀环境中的人流、设备、空气数据进行超标预警,并向用户提示解决方案。
10、在本发明的一些实施例中,所述用户交互模块包括本地和/或云端数据库,用于存储数字孪生内核模型、全生命周期bim模型的模型数据、所述环境动态监测模块的监测数据及采集的现实图像信息。
11、相对于现有技术,本发明的实施例至少具有如下优点或有益效果:
12、本发明的实施例提出了一种基于数字孪生内核的消杀机器人系统,其通过用户交互模块获取用户的消杀指令后,根据指令使定位导航模块通过数字孪生内核模型、全生命周期bim模型进行双模型的对比分析获得位置信息和导航信息,然后将信息传送给杀机器人模块并配合暗面判断模块,使消杀机器人移动到待消杀物体或区域处进行明面和暗面的消杀工作,可以使消杀机器人的导航定位更精确,解决了机器人自我迷失和室内导航定位不够精确的问题,方便用户可以更加精准地远程控制消杀机器人进行全面消杀作业,代替了人工消杀,从而有效提高医院消毒杀菌的效率和安全性。
技术特征:
1.一种基于数字孪生内核的消杀机器人系统,其特征在于,包括:用户交互模块、定位导航模块和消杀机器人模块,其中,所述用户交互模块用于向用户提供和所述消杀机器人模块交互的可视化界面以及用于用户的身份权限管理、数据的存储和管理;定位导航模块用于通过数字孪生内核模型、全生命周期bim模型双模型的对比分析获得使消杀机器人模块移动的位置信息和导航信息;所述消杀机器人模块根据所述用户交互模块获取的用户消杀指令及所述定位导航模块提供的位置信息和导航信息对指定的待消杀物体或区域进行消毒杀菌。
2.如权利要求1所述的一种基于数字孪生内核的消杀机器人系统,其特征在于,所述全生命周期bim模型为通过revit构建的三维点云模型,所述数字孪生内核模型为通过unity构建的信息模型。
3.如权利要求2所述的一种基于数字孪生内核的消杀机器人系统,其特征在于,所述数字孪生内核模型包括预先设置的定位信标信息以及基于simulex分析引擎生成的导航信息,所述导航信息包括路径信息和时间信息。
4.如权利要求1所述的一种基于数字孪生内核的消杀机器人系统,其特征在于,所述系统还包括暗面判断模块,所述暗面判断模块基于所述数字孪生内核模型、所述全生命周期bim模型以及采集的现实图像信息进行堆叠对比,对待消杀物体或区域进行暗面判断,并将判断结果反馈给所述消杀机器人模块。
5.如权利要求4所述的一种基于数字孪生内核的消杀机器人系统,其特征在于,所述系统还包括环境动态监测模块,用于动态采集和监测消杀环境中的人流、设备、空气数据。
6.如权利要求5所述的一种基于数字孪生内核的消杀机器人系统,其特征在于,所述系统还包括预警与辅助决策模块,用于根据所述环境动态监测模块采集的消杀环境中的人流、设备、空气数据进行超标预警,并向用户提示解决方案。
7.如权利要求6所述的一种基于数字孪生内核的消杀机器人系统,其特征在于,所述用户交互模块包括本地和/或云端数据库,用于存储数字孪生内核模型、全生命周期bim模型的模型数据、所述环境动态监测模块的监测数据及采集的现实图像信息。
技术总结
本发明提出了一种基于数字孪生内核的消杀机器人系统,涉及医疗自动化技术领域。该系统通过用户交互模块获取用户的消杀指令后,根据指令使定位导航模块通过数字孪生内核模型、全生命周期BIM模型进行双模型的对比分析获得位置信息和导航信息,然后将信息传送给杀机器人模块并配合暗面判断模块,使消杀机器人移动到待消杀物体或区域处进行明面和暗面的消杀工作,可以使消杀机器人的导航定位更精确,解决了机器人自我迷失和室内导航定位不够精确的问题,方便用户可以更加精准地远程控制消杀机器人进行全面消杀作业,代替了人工消杀,从而有效提高医院消毒杀菌的效率和安全性。
技术研发人员:邱榆超,阚旭博,周佶,齐玉军
受保护的技术使用者:南京工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!