一种用于辅助外科手术的持镜机器人
本发明涉及医疗器械,具体为一种用于辅助外科手术的持镜机器人。
背景技术:
1、目前,在进行腹腔镜等微创手术时,除主刀的手术医生外,还需要一名专职的医生扶持腹腔镜,负责控制腹腔镜的角度、进入腔内的深度,以控制腹腔镜的观察视野,或者在旁边操作相应器械帮助主刀医生对组织进行拉开。主刀医生把要观察的视野通过语言表达给扶镜医生,通过扶镜医生的操作来实现观察视野的要求。但有时扶镜医生并不能完全或及时领会主刀医生的意念,造成手术时间的延误;同时,在长达几小时的扶镜过程中,扶镜医生的劳动强度也大,手臂容易疲劳。同时,在临床医师紧缺的状况下,浪费一个人员专门扶镜显得过于浪费,为了节省人员,也需要一种器械完成这个工作。
2、现有的装置依靠机械臂对胸腔镜进行夹持,在调节胸腔镜的转动角度时,无法单独对胸腔镜的角度进行微调,机械臂调整动作幅度过大,容易影响调节精度,实用性较低。
技术实现思路
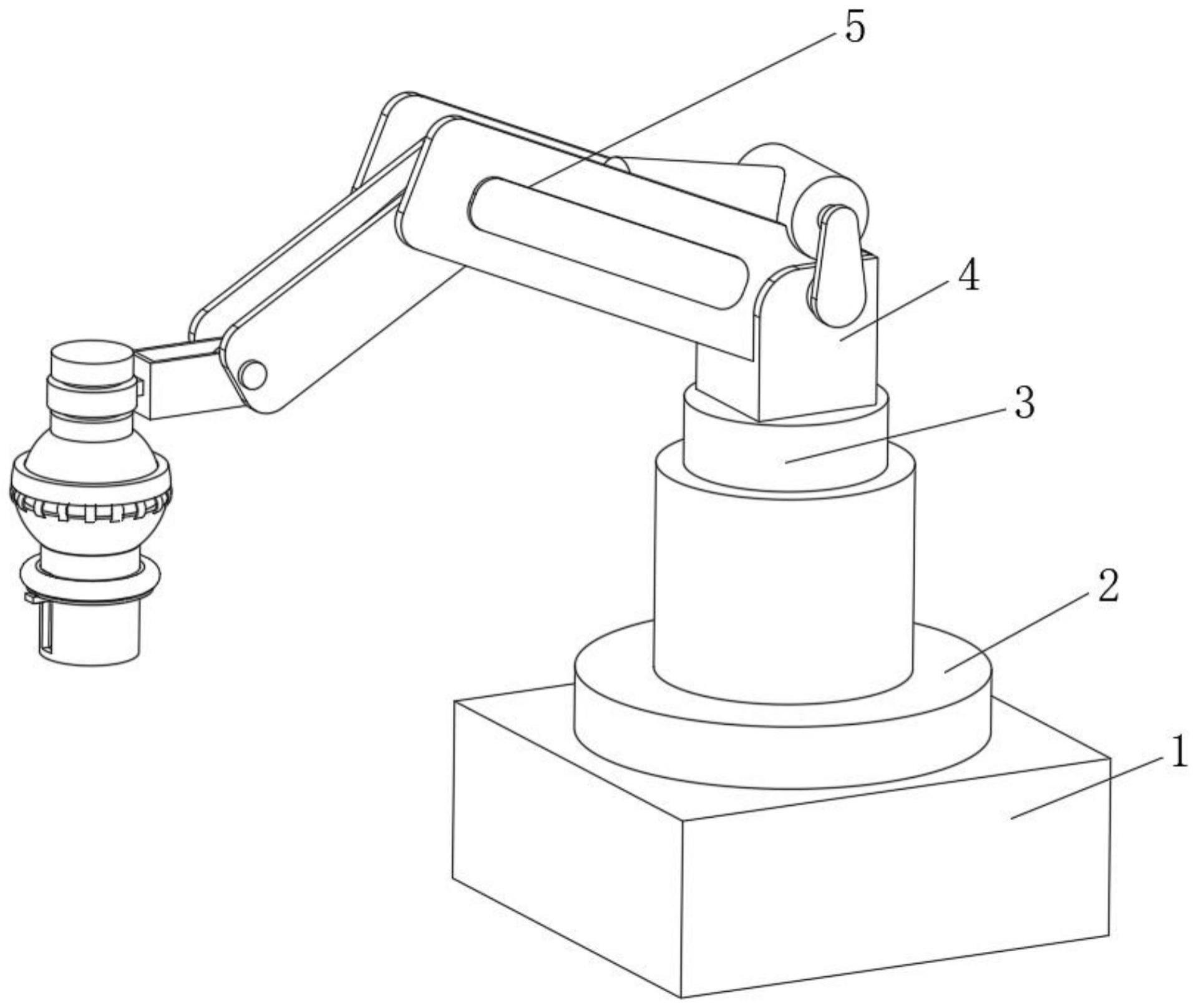
1、为解决上述技术问题,本发明提供:一种用于辅助外科手术的持镜机器人,包括驱动底座,所述驱动底座的顶部固定连接有固定座,所述固定座的顶部固定连接有升降机构,所述升降机构的顶部安装有连接件,所述连接件的顶部通过转动座转动连接有机械臂,所述机械臂的一端安装有连接框,所述连接框远离机械臂的一端安装有固定套,所述固定套的内壁安装有角度调节装置;
2、所述角度调节装置包括:
3、限位球,该限位球具有球状结构,以及设置在所述限位球顶部的支撑杆,所述支撑杆的底部与限位球的顶部固定连接;
4、调节壳,该调节壳具有半圆状结构,以及设置在所述调节壳底部的安装套筒,所述安装套筒的外侧对称开设有滑动口,所述调节壳的外侧靠近顶部的位置固定连接有弧形连接板,所述弧形连接板远离调节壳的一端安装有限位装置,所述安装套筒的外侧套设有深度调节装置。
5、将胸腔镜镜头放入安装套筒内并利用夹持装置对其固定,机械臂的移动可带动安装套筒内的胸腔镜镜头配合外科手术,在手术过程中,可手动转动调节壳,调节壳通过安装套筒带动胸腔镜沿着限位球旋转,即可调节胸腔镜的转动角度,可单独对胸腔镜的角度进行微调,防止机械臂调整动作幅度过大,影响调节精度。
6、优选的,所述连接框设置在机械臂的活动端,所述支撑杆的一端贯穿固定套并与固定套的内壁固定连接。
7、优选的,所述调节壳套设在限位球的外侧并与限位球滑动连接,所述弧形连接板设置有多组且均匀分布在调节壳外侧。
8、优选的,所述限位装置包括环形圈,所述环形圈的内壁开设有环形凹槽,所述环形凹槽的内壁固定连接有电动伸缩杆,所述电动伸缩杆的活动端固定连接有橡胶挤压块,当需要对调节后的胸腔镜进行角度固定时,可开启电动伸缩杆将橡胶挤压块从环形凹槽内推出,橡胶挤压块挤压在限位球的外壁上,即可通过橡胶挤压块与限位球外壁的摩擦力将安装套筒转动的角度固定,方便通过调节壳将胸腔镜固定在合适角度,调节壳可在限位球外部沿着限位球转动至任意角度,转动自由度较高,调节方便。
9、优选的,所述环形圈的底部与弧形连接板的顶部固定连接,所述电动伸缩杆设置有多组,所述橡胶挤压块远离电动伸缩杆的一端延伸至限位球的外侧。
10、优选的,所述深度调节装置包括调节环,所述调节环的底部通过旋转轴承转动连接有调节板,所述调节板远离旋转轴承的一端安装有夹持装置,转动调节环使其沿着安装套筒外的螺纹进行螺旋转动,调节环转动时带动调节板沿着滑动口移动,可通过调节环带动调节板控制夹持装置移动,夹持装置带动胸腔镜移动,胸腔镜的深度可调节,使胸腔镜进入体内的深度能够突破腹腔镜手术持镜机器人的机械极限位置,使胸腔镜的调整更灵活。
11、优选的,所述调节环套设在安装套筒上并与安装套筒的外壁螺纹连接,所述调节板靠近夹持装置的一端贯穿滑动口并与滑动口内壁滑动连接。
12、优选的,所述夹持装置包括环形管,所述环形管的外侧连通有延伸套筒,所述延伸套筒的内壁安装有电动推杆,所述电动推杆的活动端固定连接有密封活塞头,所述环形管的内侧均匀连通有滑动套筒,所述滑动套筒的内壁滑动连接有活塞杆,所述活塞杆的一端延伸至滑动套筒的外部并固定连接有摩擦垫,所述摩擦垫远离活塞杆的一侧安装有橡胶条,胸腔镜镜头的一端插入环形管内侧,开启电动推杆将延伸套筒内部的密封活塞头推动,密封活塞头挤压液压并推出活塞杆,活塞杆带动摩擦垫挤压胸腔镜镜头的外壁,并通过橡胶条增加摩擦垫与胸腔镜镜头之间的摩擦力,将胸腔镜固定在安装套筒内,便于快速安装拆卸和安装胸腔镜,不仅节省了手术的准备时间,而且能够为胸腔镜的维修和保养提供了便利条件。
13、优选的,所述密封活塞头的外侧与延伸套筒的内壁滑动连接,所述延伸套筒远离环形管的一端与调节板固定连接。
14、优选的,所述橡胶条设置有多组且均匀分布在摩擦垫上,所述环形管的内部填充有液压油。
15、本发明提供了一种用于辅助外科手术的持镜机器人。具备以下有益效果:
16、1、该一种用于辅助外科手术的持镜机器人,通过角度调节装置的安装,将胸腔镜镜头放入安装套筒内并利用夹持装置对其固定,机械臂的移动可带动安装套筒内的胸腔镜镜头配合外科手术,在手术过程中,可手动转动调节壳,调节壳通过安装套筒带动胸腔镜沿着限位球旋转,即可调节胸腔镜的转动角度,可单独对胸腔镜的角度进行微调,防止机械臂调整动作幅度过大,影响调节精度。
17、2、该一种用于辅助外科手术的持镜机器人,通过限位装置和角度调节装置的安装,当需要对调节后的胸腔镜进行角度固定时,可开启电动伸缩杆将橡胶挤压块从环形凹槽内推出,橡胶挤压块挤压在限位球的外壁上,即可通过橡胶挤压块与限位球外壁的摩擦力将安装套筒转动的角度固定,方便通过调节壳将胸腔镜固定在合适角度,调节壳可在限位球外部沿着限位球转动至任意角度,转动自由度较高,调节方便。
18、3、该一种用于辅助外科手术的持镜机器人,通过深度调节装置的安装,转动调节环使其沿着安装套筒外的螺纹进行螺旋转动,调节环转动时带动调节板沿着滑动口移动,可通过调节环带动调节板控制夹持装置移动,夹持装置带动胸腔镜移动,胸腔镜的深度可调节,使胸腔镜进入体内的深度能够突破腹腔镜手术持镜机器人的机械极限位置,使胸腔镜的调整更灵活。
19、4、该一种用于辅助外科手术的持镜机器人,通过夹持装置的安装,胸腔镜镜头的一端插入环形管内侧,开启电动推杆将延伸套筒内部的密封活塞头推动,密封活塞头挤压液压并推出活塞杆,活塞杆带动摩擦垫挤压胸腔镜镜头的外壁,并通过橡胶条增加摩擦垫与胸腔镜镜头之间的摩擦力,将胸腔镜固定在安装套筒内,便于快速安装拆卸和安装胸腔镜,不仅节省了手术的准备时间,而且能够为胸腔镜的维修和保养提供了便利条件。
技术特征:
1.一种用于辅助外科手术的持镜机器人,包括驱动底座(1),其特征在于:
2.根据权利要求1所述的一种用于辅助外科手术的持镜机器人,其特征在于:所述连接框(6)设置在机械臂(5)的活动端,所述支撑杆(82)的一端贯穿固定套(7)并与固定套(7)的内壁固定连接。
3.根据权利要求1所述的一种用于辅助外科手术的持镜机器人,其特征在于:所述调节壳(83)套设在限位球(81)的外侧并与限位球(81)滑动连接,所述弧形连接板(86)设置有多组且均匀分布在调节壳(83)外侧。
4.根据权利要求1所述的一种用于辅助外科手术的持镜机器人,其特征在于:所述限位装置(87)包括环形圈(871),所述环形圈(871)的内壁开设有环形凹槽(872),所述环形凹槽(872)的内壁固定连接有电动伸缩杆(873),所述电动伸缩杆(873)的活动端固定连接有橡胶挤压块(874)。
5.根据权利要求4所述的一种用于辅助外科手术的持镜机器人,其特征在于:所述环形圈(871)的底部与弧形连接板(86)的顶部固定连接,所述电动伸缩杆(873)设置有多组,所述橡胶挤压块(874)远离电动伸缩杆(873)的一端延伸至限位球(81)的外侧。
6.根据权利要求1所述的一种用于辅助外科手术的持镜机器人,其特征在于:所述深度调节装置(88)包括调节环(881),所述调节环(881)的底部通过旋转轴承(882)转动连接有调节板(883),所述调节板(883)远离旋转轴承(882)的一端安装有夹持装置(884)。
7.根据权利要求6所述的一种用于辅助外科手术的持镜机器人,其特征在于:所述调节环(881)套设在安装套筒(84)上并与安装套筒(84)的外壁螺纹连接,所述调节板(883)靠近夹持装置(884)的一端贯穿滑动口(85)并与滑动口(85)内壁滑动连接。
8.根据权利要求6所述的一种用于辅助外科手术的持镜机器人,其特征在于:所述夹持装置(884)包括环形管(8841),所述环形管(8841)的外侧连通有延伸套筒(8842),所述延伸套筒(8842)的内壁安装有电动推杆(8843),所述电动推杆(8843)的活动端固定连接有密封活塞头(8844),所述环形管(8841)的内侧均匀连通有滑动套筒(8845),所述滑动套筒(8845)的内壁滑动连接有活塞杆(8846),所述活塞杆(8846)的一端延伸至滑动套筒(8845)的外部并固定连接有摩擦垫(8847),所述摩擦垫(8847)远离活塞杆(8846)的一侧安装有橡胶条(8848)。
9.根据权利要求8所述的一种用于辅助外科手术的持镜机器人,其特征在于:所述密封活塞头(8844)的外侧与延伸套筒(8842)的内壁滑动连接,所述延伸套筒(8842)远离环形管(8841)的一端与调节板(883)固定连接。
10.根据权利要求8所述的一种用于辅助外科手术的持镜机器人,其特征在于:所述橡胶条(8848)设置有多组且均匀分布在摩擦垫(8847)上,所述环形管(8841)的内部填充有液压油。
技术总结
本发明公开了一种用于辅助外科手术的持镜机器人,包括驱动底座,所述驱动底座的顶部固定连接有固定座,所述固定座的顶部固定连接有升降机构,所述升降机构的顶部安装有连接件,所述连接件的顶部通过转动座转动连接有机械臂,所述机械臂的一端安装有连接框,所述连接框远离机械臂的一端安装有固定套,所述固定套的内壁安装有角度调节装置;所述角度调节装置包括:限位球,该限位球具有球状结构,以及设置在所述限位球顶部的支撑杆,所述支撑杆的底部与限位球的顶部固定连接,本发明涉及医疗器械技术领域。该一种用于辅助外科手术的持镜机器人,可单独对胸腔镜的角度进行微调,防止机械臂调整动作幅度过大,影响调节精度。
技术研发人员:王春光,高沿航,金成彦,李金东,郭航
受保护的技术使用者:吉林大学第二医院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!