一种基于目标跟随毫米波雷达的跌倒检测方法
本发明属于跌倒检测,具体涉及一种基于毫米波雷达的浴室跌倒检测方法。
背景技术:
1、老龄化已经成为世界范围内普遍都存在的一个社会问题,人体的感官、认知能力和身体机能都会随着年龄的增长而逐渐开始衰退,因此,跌倒所带来的伤害会随着年龄的变大呈现指数型的增长。根据世卫组织的一项最新数据表明,因跌倒而受伤的老年人每年多达3700多万,其中有60多万的老年人因跌倒而直接或间接的死亡。此外,跌倒后未获得及时的救助是造成老人伤亡的重要原因。跌倒目前是一个全世界范围内的一个重要的健康问题。为了确保独居老人的健康和独居生活的安全,及时的发现跌倒事件的发生并且第一时间进行救助是十分必要的。
2、目前现有的技术公开的跌倒检测相关技术如下:(1)第一种是可穿戴设备在跌倒检测中的应用。可穿戴设备性能强大,可以准确的获得目标的各类信息,在配合性能较好的信号处理硬件时,能够实现对目标的实时跌倒检测,并且可穿戴设备结构简单,成本低。但是,由于老年人记忆力下降会时常忘记佩戴可穿戴设备,且可穿戴设备需要经常充电,在洗澡时不方便佩戴。
3、(2)第二种是基于视觉的跌倒检测设备的应用。基于视觉的跌倒检测设备在跌倒检测领域中应用最为广泛,许多应用通过深度学习的算法结合不同类型的视觉检测设备来监测跌倒事件的发生,并且基于视觉的跌倒检测检测精确率高。但是,基于视觉的跌倒检测方法不能够在涉及隐私的环境中使用,并且易受环境干扰,复杂环境下识别率不高。
4、(3)第三种是基于射频技术的跌倒检测设备的应用。基于射频技术的跌倒检测可以分为三类:多普勒雷达,无线网络和调频连续波。正常情况下,射频信号的剧烈变化需要产生幅度较大的身体动作。然而,并不是所有的跌倒动作都是大幅度的,而且这种跌倒动作与其产生的无线电频率信号的相关性往往依赖于测试时的实验环境,因此很有可能对新环境并不具有鲁棒性。
5、上述各个方法中,方法(1)需要经常充电,洗澡时不方便佩戴(2)隐私性较弱,易受环境干扰,复杂环境下识别率低(3)检测精确率较低,容易造成漏警,鲁棒性较差。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的基于毫米波雷达的浴室跌倒检测方法解决了现有的跌倒检测方法存在的不方便佩戴、隐私性弱、易受环境影响及容易虚警和漏警等问题。
2、为了达到上述发明目的,本发明采用的技术方案为:一种基于毫米波雷达的浴室跌倒检测方法,包括以下步骤:
3、步骤s1,在浴室布置毫米波雷达;
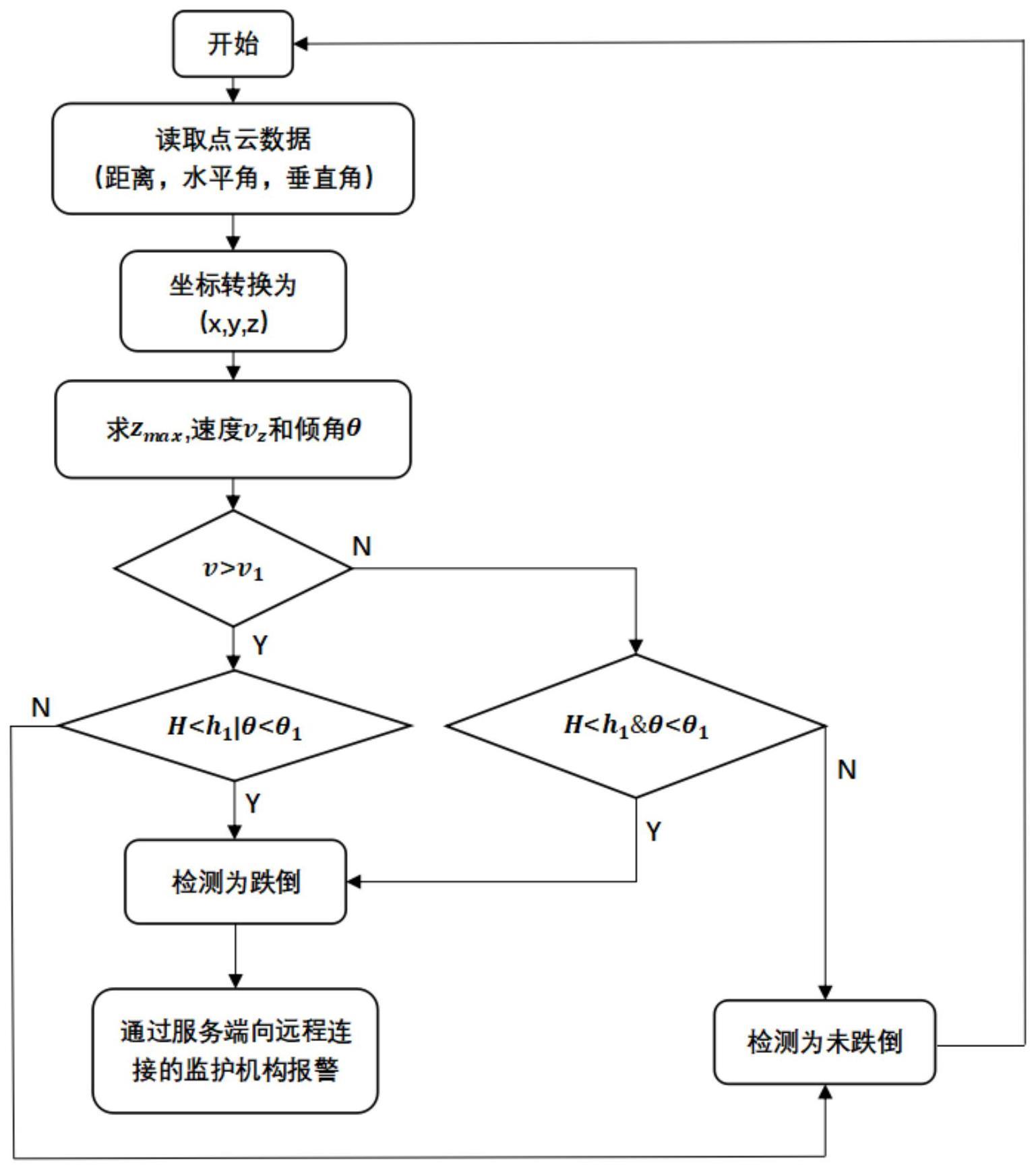
4、步骤s2,读取数据阶段,读取点云数据(距离,水平角,垂直角);
5、步骤s3,将点云数据进行三维坐标转换为(x,y,z),通过计算求出身体姿态特征值(高度,速度,倾角);
6、步骤s41,若目标的速度大于设置的阈值v1,则进入步骤s51;
7、步骤s42,若目标的速度未超过设置的阈值v1,则进入步骤s52;
8、步骤s51,判断当前目标的高度是否小于设置的阈值h1;判断当前目标的身体倾角是否小于设置的阈值θ1,若两者同时符合,则进入步骤s6;否则进入步骤s8。
9、步骤s52,判断当前目标的高度是否小于设置的阈值h2;判断当前目标的身体倾角是否小于设置的阈值θ2,若有其中任意一种符合,则进入步骤s6;否则进入步骤s8。
10、步骤s6,检测目标为跌倒状态;进入步骤s7。
11、步骤s7,通过服务端向远程连接的监护机构报警。
12、步骤s8,检测目标为未跌倒状态;进入步骤s2。
13、本发明的有益效果为:
14、(1)本发明的应用场景是浴室,浴室的特点是湿滑,在洗澡时会产生大量的水雾,并且对隐私保护的要求很高。因此本发明采用了毫米波雷达技术,毫米波雷达可以穿透水雾,并且很好的保护隐私。
15、(2)本发明采用的身体倾角作为跌倒判别的依据之一,有效的避免了诸如坐下或者蹲下这种类似跌倒现象的虚警,提高了跌倒识别的准确性。
16、(3)本发明采用了点云去噪算法,去除了多余的噪声点和玻璃反射的信号,使人物成像、高度判断、速度判断和身体倾角的计算更加精确,有效地提高了判别的准确性。
17、(4)本发明采用了一种简单、有效的跌倒检测识别算法,通过毫米波雷达获取目标的点云信息,基于多个阈值进行跌倒检测,有效的减少了虚警和漏警。
18、(5)总体来说,本发明中的整个检测过程其检测设备只用到了毫米波雷达,无需使用其他的传感器和辅助设备,减小了设备占用的场地空间,使监测变得更加简便,在使用该系统的过程中不会出现人物的声音,图片等信息,避免了用户的隐私泄露。
技术特征:
1.一种基于目标跟随毫米波雷达的跌倒检测方法,其特征在于,具体步骤如下:
2.如权利要求1所述的一种基于目标跟随毫米波雷达的跌倒检测方法,其特征在于,步骤s1中,将毫米波雷达安装在浴室房顶的角落,下倾角设置为30度,毫米波雷达选用了ti公司的iwr6843isk-ods,该款毫米波雷达天线在垂直方向有120度的视角。
3.如权利要求1所述的一种基于目标跟随毫米波雷达的跌倒检测方法,其特征在于,步骤s2中,云数据包括距离,水平角,垂直角。
4.如权利要求1所述的一种基于目标跟随毫米波雷达的跌倒检测方法,其特征在于,步骤s3中,身体姿态特征值包括高度,速度,倾角。
5.如权利要求1所述的一种基于目标跟随毫米波雷达的跌倒检测方法,其特征在于,步骤s41和步骤s42中,阈值v1为4m/s。
6.如权利要求1所述的一种基于目标跟随毫米波雷达的跌倒检测方法,其特征在于,步骤s51和步骤s52中,阈值h1为500mm,阈值h2为500mm;阈值θ1和阈值θ2均为30度。
7.如权利要求1所述的一种基于目标跟随毫米波雷达的跌倒检测方法,其特征在于,步骤s51和步骤s52中,身体倾角计算公式为:
技术总结
本发明属于跌倒检测技术领域,具体涉及一种基于毫米波雷达的浴室跌倒检测方法。根据毫米波雷达收集目标所反射的毫米波信号,并基于毫米波信号生成运动目标的三维点云作为跌倒监测系统的输入信息,计算出人体的关键身体姿态特征值﹐用于判断人员当前所处状态,并在检测到跌倒行为时报警。在进入跌倒判决逻辑后,在速度达到所设定的阈值同时,高度和倾角的任意一个也要达到所设定的阈值,才可判断为跌倒。为了防止漏警,当速度的条件无法满足时,若目标的高度特征值和倾角都低于所设置的进阶阈值,即使速度的条件不满足,也可直接判定为跌倒动作。本发明采用了点云去噪算法,去除了多余的噪声点和玻璃反射的信号,有效地提高了判别的准确性。
技术研发人员:丁建宁,吴磊,程广贵,王冰,张忠强
受保护的技术使用者:江苏大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!