腹腔镜机器人系统及控制方法与流程
本申请涉及医疗器械,更具体地,涉及一种腹腔镜机器人系统及控制方法。
背景技术:
1、随着远程医疗的发展,腹腔镜机器人系统已经被广泛应用。腹腔镜机器人系统一般包括控制装置和机械臂,两者通信连接,控制装置将医生的手术操作信息传递给机械臂,机械臂模拟医生的手臂动作,将腹腔镜的镜管插入患者的身体,从而配合医生进行远程手术。腹腔镜的可见范围称为视野角,而腹腔镜轴线方向与视野角中分线所成角度称为视角,腹腔镜的视角有0°、30°、45°、70°等。
2、现有技术中,不同厂商的腹腔镜是无法通用的;原因在于,每个厂商只会将自己生产的腹腔镜的规格、型号存储在控制装置中,也就是说,每台腹腔镜机器人只能识别出本厂商生产的腹腔镜,然后控制机械臂运动。这就造成了,如果b厂商生产的一款45°视角的腹腔镜,安装到a厂商的腹腔镜机器人的机械臂上,而a厂商的控制装置中仅存储了对应0°、30°视角的腹腔镜的运动学参数的话,则b厂商的这个腹腔镜将找不到自己的旋转极限位置,这会导致b厂商的腹腔镜的旋转范围过大或者过小。
3、有鉴于此,需要提供一种新的技术方案,以解决上述技术问题。
技术实现思路
1、本申请的一个目的是提供一种腹腔镜机器人系统及控制方法的新技术方案。
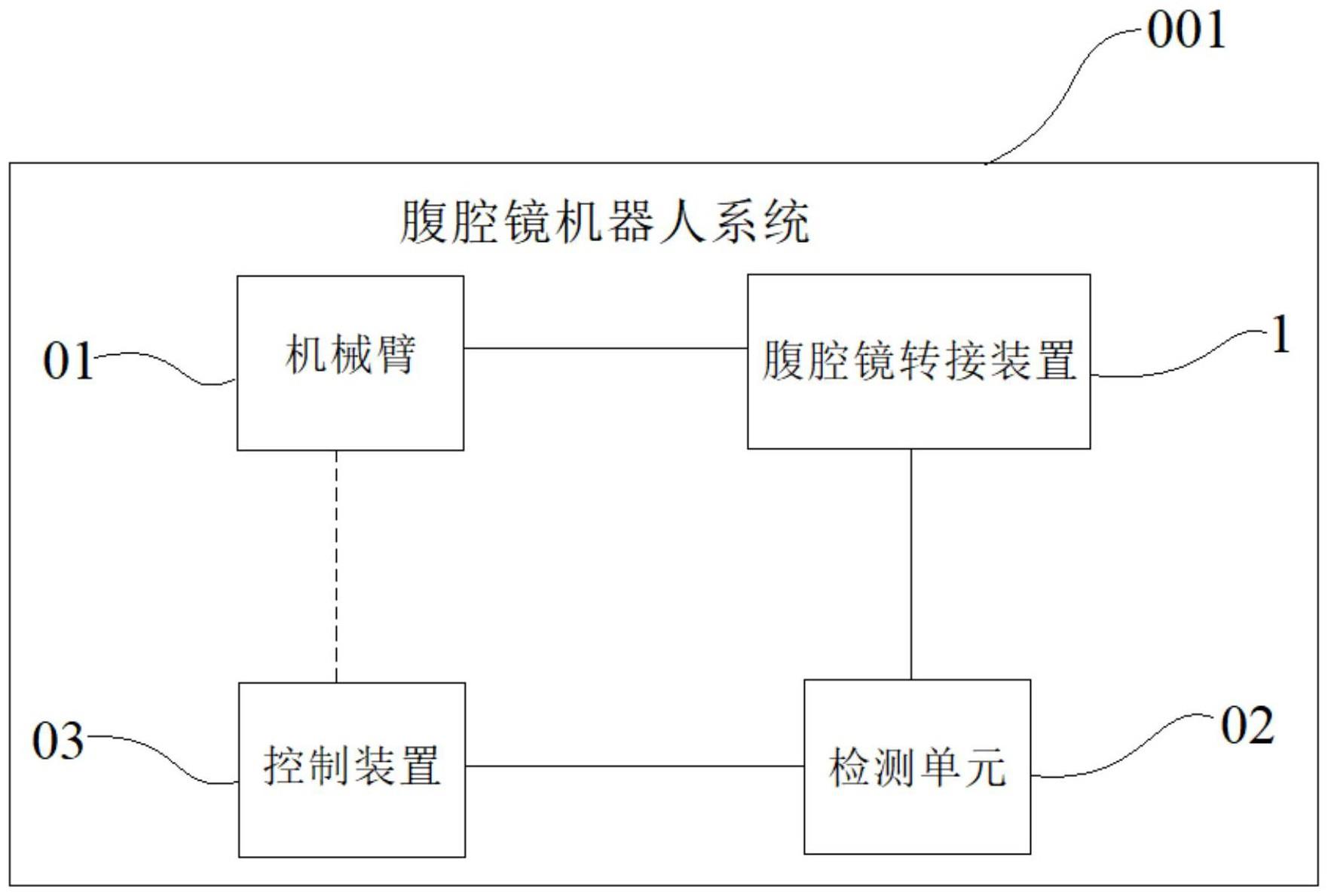
2、根据本申请的第一方面,提供了一种腹腔镜机器人系统,所述腹腔镜机器人系统包括:机械臂、检测单元和控制装置;
3、所述控制装置与所述机械臂通信连接,所述控制装置控制所述机械臂的运动,所述机械臂安装有腹腔镜转接装置;
4、所述检测单元用于检测所述腹腔镜转接装置连接的腹腔镜的视角,并将检测结果反馈给所述控制装置;
5、所述控制装置根据所述检测结果,设定运动学参数极限值,使得所述腹腔镜转接装置驱动所述腹腔镜的转动过程不超过与所述视角对应的运动学参数极限值。
6、可选地,所述机械臂与所述控制装置通过远程通信连接。
7、可选地,所述检测单元还用于检测所述腹腔镜转接装置是否连接腹腔镜,当检测结果为是时,所述检测单元向所述控制装置发送可写入信号,所述控制装置接收到所述可写入信号后,允许对所述运动学参数极限值进行重新设定。
8、可选地,所述腹腔镜转接装置包括:
9、固定基座;
10、连接组件,所述连接组件安装于所述固定基座,所述连接组件内具有容纳空间,腹腔镜的部分结构穿设于所述容纳空间以使腹腔镜与所述连接组件可拆卸连接;所述连接组件包括约束件及传动件,所述约束件可沿其径向收缩或展开;所述连接组件具有锁定状态和解锁状态;
11、第一驱动件,所述第一驱动件与所述约束件连接;
12、第二驱动件,所述第二驱动件与所述传动件连接;
13、在所述连接组件处于锁定状态下,所述第一驱动件驱动所述约束件沿其径向收缩以锁紧腹腔镜、或者沿其径向展开以释放腹腔镜;
14、在所述连接组件处于解锁状态下,所述第二驱动件通过所述传动件驱动所述连接组件转动,所述连接组件带动腹腔镜转动以调节腹腔镜的视角。
15、可选地,所述第一驱动件包括旋钮部及连接部,所述旋钮部与所述连接部固定连接,所述连接部套接在所述约束件的外部;
16、所述旋钮部被配置为:用于在外力作用下带动所述连接部转动,所述连接部作用于所述约束件以使所述约束件沿其径向收缩或展开。
17、可选地,所述约束件包括沿其周向分布的多个伸缩块,相邻两个所述伸缩块之间设置有伸缩缝;
18、在所述第一驱动件作用于所述约束件以使多个所述伸缩块相互靠近的情况下,所述约束件锁紧腹腔镜;
19、在所述第一驱动件作用于所述约束件以使多个所述伸缩块相互远离的情况下,所述约束件释放腹腔镜。
20、可选地,所述第二驱动件包括驱动电机及主动齿轮,所述驱动电机的输出轴与所述主动齿轮连接,所述传动件为与所述主动齿轮相啮合的从动齿轮。
21、可选地,所述第二驱动件还包括传动轮,所述驱动电机的输出轴与所述传动轮连接,所述传动轮与所述主动齿轮连接。
22、可选地,所述传动轮设置有第一定位凸起,所述传动轮安装于所述固定基座,所述固定基座设置有第二定位凸起,所述第一定位凸起被配置为与所述第二定位凸起抵接以对所述传动轮进行零点位置识别。
23、可选地,所述腹腔镜转接装置还包括锁控组件,所述锁控组件安装于所述固定基座,所述锁控组件被配置为与所述传动件连接以使所述连接组件处于锁定状态,或者脱离所述传动件以使所述连接组件处于解锁状态。
24、可选地,所述锁控组件包括锁定件及控制件;所述锁定件具有第一卡接部,所述传动件具有第二卡接部;
25、所述控制件与所述锁定件连接并驱动所述锁定件在第一位置与第二位置之间切换;
26、在所述锁定件处于第一位置的情况下,所述第一卡接部与所述第二卡接部配合卡接、所述连接组件处于锁定状态;
27、在所述锁定件处于第二位置的情况下,所述第一卡接部与所述第二卡接部分离、所述连接组件处于解锁状态。
28、可选地,所述控制件包括顶杆及弹簧,所述固定基座开设有容置槽,所述锁定件位于所述容置槽外,所述顶杆的一部分位于所述容置槽内;所述顶杆与所述锁定件顶推配合连接;
29、所述弹簧设置在所述容置槽内,且所述弹簧沿其弹性形变方向的一端与固定基座抵接、另一端与所述顶杆抵接;
30、所述顶杆被配置为在外力作用下顶推所述锁定件以使所述锁定件从第一位置切换至第二位置。
31、可选地,所述固定基座包括座体及板体,所述座体与所述板体可拆卸连接;
32、所述座体开设有第一通孔,所述板体开设有第二通孔;在所述座体与所述板体连接的情况下,所述第一通孔与所述第二通孔连通并形成用于穿设所述连接组件的通孔部。
33、根据本申请的第二方面,提供了一种腹腔镜机器人控制方法,所述控制方法包括:
34、检测所述腹腔镜机器人的机械臂上连接的腹腔镜的视角;
35、根据所述视角,设定所述腹腔镜的运动学参数极限值;
36、检测所述腹腔镜在运动过程中,是否达到所述运动学参数极限值,如果达到,则停止驱动所述腹腔镜的旋转。
37、可选地,所述控制方法还包括:
38、检测所述腹腔镜的视角是否发生改变,如果是,则重新设定所述运动学参数极限值。
39、采用本申请实施例提供的腹腔镜机器人系统,能够确保机械臂通过腹腔镜转接装置驱动腹腔镜的运动在腹腔镜允许的视角极限值范围内;避免腹腔镜的运动超出视角极限值范围而对手术的安全性带来不良影响。
40、通过以下参照附图对本申请的示例性实施例的详细描述,本申请的其它特征及其优点将会变得清楚。
技术特征:
1.一种腹腔镜机器人系统,其特征在于,所述腹腔镜机器人系统包括:机械臂(01)、检测单元(02)和控制装置(03);
2.根据权利要求1所述的腹腔镜机器人系统,其特征在于,所述机械臂(01)与所述控制装置(03)通过远程通信连接。
3.根据权利要求1所述的腹腔镜机器人系统,其特征在于,所述检测单元(02)还用于检测所述腹腔镜转接装置(1)是否连接腹腔镜,当检测结果为是时,所述检测单元(02)向所述控制装置(03)发送可写入信号,所述控制装置(03)接收到所述可写入信号后,允许对所述运动学参数极限值进行重新设定。
4.根据权利要求1-3中任一项所述的腹腔镜机器人系统,其特征在于,所述腹腔镜转接装置(1)包括:
5.根据权利要求4所述的腹腔镜机器人系统,其特征在于,所述第一驱动件(13)包括旋钮部(131)及连接部(132),所述旋钮部(131)与所述连接部(132)固定连接,所述连接部(132)套接在所述约束件(121)的外部;
6.根据权利要求4所述的腹腔镜机器人系统,其特征在于,所述约束件(121)包括沿其周向分布的多个伸缩块(1211),相邻两个所述伸缩块(1211)之间设置有伸缩缝(1210);
7.根据权利要求4所述的腹腔镜机器人系统,其特征在于,所述第二驱动件(14)包括驱动电机及主动齿轮(141),所述驱动电机的输出轴与所述主动齿轮(141)连接,所述传动件(122)为与所述主动齿轮(141)相啮合的从动齿轮。
8.根据权利要求7所述的腹腔镜机器人系统,其特征在于,所述第二驱动件(14)还包括传动轮(142),所述驱动电机的输出轴与所述传动轮(142)连接,所述传动轮(142)与所述主动齿轮(141)连接。
9.根据权利要求8所述的腹腔镜机器人系统,其特征在于,所述传动轮(142)设置有第一定位凸起(1420),所述传动轮(142)安装于所述固定基座(11),所述固定基座(11)设置有第二定位凸起(100),所述第一定位凸起(1420)被配置为与所述第二定位凸起(100)抵接以对所述传动轮(142)进行零点位置识别。
10.根据权利要求4所述的腹腔镜机器人系统,其特征在于,所述腹腔镜转接装置还包括锁控组件(15),所述锁控组件(15)安装于所述固定基座(11),所述锁控组件(15)被配置为与所述传动件(122)连接以使所述连接组件(12)处于锁定状态,或者脱离所述传动件(122)以使所述连接组件(12)处于解锁状态。
11.根据权利要求10所述的腹腔镜机器人系统,其特征在于,所述锁控组件(15)包括锁定件(151)及控制件(152);所述锁定件(151)具有第一卡接部(1510),所述传动件(122)具有第二卡接部(1220);
12.根据权利要求11所述的腹腔镜机器人系统,其特征在于,所述控制件(152)包括顶杆(1521)及弹簧(1522),所述固定基座(11)开设有容置槽,所述锁定件(151)位于所述容置槽外,所述顶杆(1521)的一部分位于所述容置槽内;所述顶杆(1521)与所述锁定件(151)顶推配合连接;
13.根据权利要求4所述的腹腔镜机器人系统,其特征在于,所述固定基座(11)包括座体(111)及板体(112),所述座体(111)与所述板体(112)可拆卸连接;
14.一种腹腔镜机器人控制方法,其特征在于,所述控制方法包括:
15.根据权利要求14所述的腹腔镜机器人控制方法,其特征在于,所述控制方法还包括:
技术总结
本申请公开了一种腹腔镜机器人系统及控制方法。该腹腔镜机器人系统包括机械臂、检测单元和控制装置;所述控制装置与所述机械臂通信连接,所述控制装置控制所述机械臂的运动,所述机械臂安装有腹腔镜转接装置;所述检测单元用于检测所述腹腔镜转接装置连接的腹腔镜的视角,并将检测结果反馈给所述控制装置;所述控制装置根据所述检测结果,设定运动学参数极限值,使得所述腹腔镜转接装置驱动所述腹腔镜的转动过程不超过与所述视角对应的运动学参数极限值。
技术研发人员:苏衍宇,王晓伟,袁宝武,冯海生
受保护的技术使用者:哈尔滨思哲睿智能医疗设备股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!