一种机械式超声驱动装置、三维重建方法及系统与流程
本发明涉及超声扫描,尤其涉及一种机械式超声驱动装置、三维重建方法及系统。
背景技术:
1、在医疗中,超声扫描成像可以提供巨大的参考帮助,使得医师更好地判断患者的情况。而在超声扫描中,人们现在更偏向于4d超声探头。4d超声探头的第四维是指时间这个向量。基于4d超声探头,可以获取患者的患处的三维成像。
2、但是,4d超声探头具有成本高、兼容性差的缺点,而传统的2d超声探头,只能平面成像。因此,如果可以通过控制2d超声探头运动来实现三维成像,则可以解决两者的缺点。
技术实现思路
1、鉴于以上技术问题,本发明提供了一种机械式超声驱动装置、三维重建方法及系统,以使得2d超声探头可以实现三维成像。
2、本公开的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本公开的实践而习得。
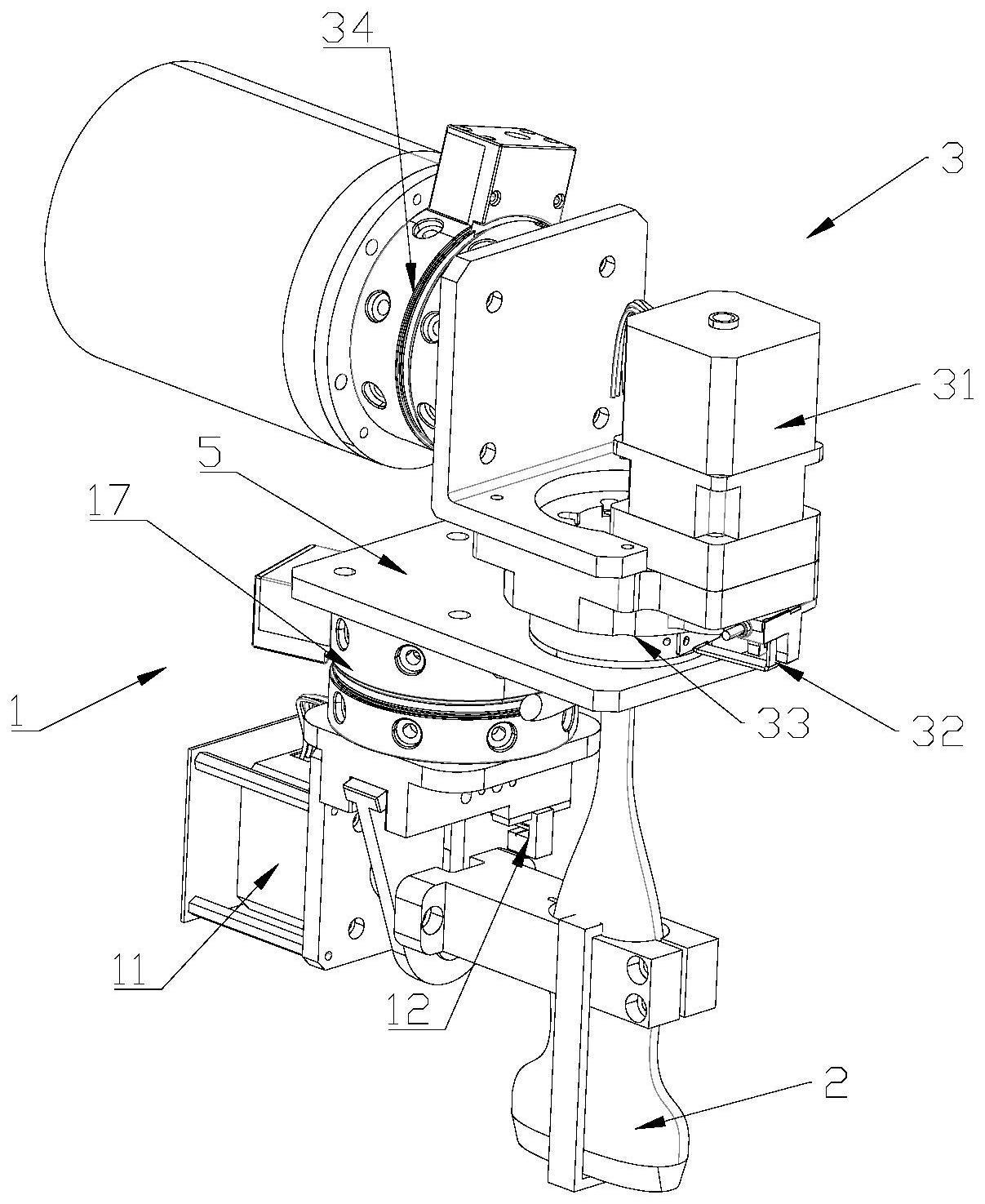
3、根据本发明的一方面,公开一种机械式超声驱动装置,包括:第一驱动模组,所述第一驱动模组包括一用于带动超声探头的发生端沿着第一轴线在预设角度内往复旋转的第一电机,和包括第一位置传感器,所述第一位置传感器用于记录所述第一电机的角位置;
4、第二驱动模组,所述第二驱动模组包括一用于带动所述第一驱动模组沿着第二轴线转动的第二电机和用于记录所述第二电机的角位置的第二位置传感器,所述第二轴线与所述第一轴线相垂直。
5、进一步的,所述第二轴线与所述超声探头的扫描面的中轴线重合或在预设范围内浮动。
6、进一步的,所述第二驱动模组中还包括减速器,所述减速器与所述第二电机的输出轴连接,所述减速器的输出轴为所述第二轴线。
7、进一步的,所述第一驱动模组还包括:旋转板,所述旋转板中设置有限位槽,及其顶部设置为弧形;连杆,所述连杆的一端连接于所述第一电机的转轴,其另一端被限位于所述限位槽内;固定座,所述固定座形成对所述旋转板的顶部的滑动限位;其中,所述超声探头与所述旋转板相连接。
8、进一步的,所述第一驱动模组还包括:安装支架,所述安装支架连接于所述旋转板,所述安装支架形成对所述超声探头的安装。
9、进一步的,所述安装支架形成对所述超声探头的夹持,以及,其上安装有一支撑所述超声探头的底部的托架。
10、进一步的,所述驱动装置还包括:第一力传感器,其连接于所述第一驱动模组与所述第二驱动模组之间;第二力传感器,其连接于所述第二驱动模组与机械臂之间。
11、进一步的,所述驱动装置还包括:连接板,所述第一驱动模组通过所述第一力传感器与所述连接板连接,所述第二驱动模组用于驱动所述连接板旋转;连接座,所述连接座与所述第二力传感器连接,以及,所述连接座形成对所述第二电机的固定。
12、根据本发明的第二方面,提供一种机械式超声三维重建方法,包括如上述的驱动装置,所述重建方法包括:
13、实时获取多个所述超声探头拍摄的超声图像;
14、获取在产生所述超声图像时所述超声探头的物理信息,所述物理信息包括角位置、接触位置;
15、将多个所述超声图像按照时间序列对应的所述物理信息拼接成3d图像。
16、基于本发明的第三方面,提供一种机械式超声三维重建系统,所述系统包括如上述的驱动装置,还包括:
17、存储器,用于存储指令;
18、控制器,用于执行所述指令以执行如上述的重建方法。
19、本公开的技术方案具有以下有益效果:
20、基于该机械式超声驱动装置,可以带动2d超声探头以绕着轴心点旋转,超声探头的角位置信息可通过第一位置传感器和第二位置传感器得到,进而可以使得2d图像重建为3d模型。因此成本低,兼容性好,且当该装置被当安装至机械臂末端时,可减少机械臂的运动范围及运动精度的需求。
技术特征:
1.一种机械式超声驱动装置,其特征在于,包括:
2.根据权利要求1所述的机械式超声驱动装置,其特征在于,所述第二轴线与所述超声探头的扫描面的中轴线重合或在预设范围内浮动。
3.根据权利要求1所述的机械式超声驱动装置,其特征在于,所述第二驱动模组中还包括减速器,所述减速器与所述第二电机的输出轴连接,所述减速器的输出轴为所述第二轴线。
4.根据权利要求1所述的机械式超声驱动装置,其特征在于,所述第一驱动模组还包括:
5.根据权利要求4所述的机械式超声驱动装置,其特征在于,所述第一驱动模组还包括:安装支架,所述安装支架连接于所述旋转板,所述安装支架形成对所述超声探头的安装。
6.根据权利要求5所述的机械式超声驱动装置,其特征在于,所述安装支架形成对所述超声探头的夹持,以及,其上安装有一支撑所述超声探头的底部的托架。
7.根据权利要求1所述的机械式超声驱动装置,其特征在于,所述驱动装置还包括:
8.根据权利要求7所述的机械式超声驱动装置,其特征在于,所述驱动装置还包括:连接板,所述第一驱动模组通过所述第一力传感器与所述连接板连接,所述第二驱动模组用于驱动所述连接板旋转;
9.一种机械式超声三维重建方法,其特征在于,包括如权利要求1-8任一项所述的驱动装置,所述重建方法包括:
10.一种机械式超声三维重建系统,其特征在于,所述系统包括如权利要求1-8任一项所述的驱动装置,还包括:
技术总结
本发明公开一种机械式超声驱动装置、三维重建方法及系统,驱动装置包括:第一驱动模组,第一驱动模组包括一用于带动超声探头的发生端沿着第一轴线在预设角度内往复旋转的第一电机,和用于记录第一电机的角位置的第一位置传感器;第二驱动模组,第二驱动模组包括一用于带动第一驱动模组沿着第二轴线转动的第二电机和用于记录第二电机的角位置的第二位置传感器,第二轴线与第一轴线相垂直。基于本发明,可以带动2D超声探头以绕着轴心点旋转,超声探头的角位置信息可通过第一位置传感器和第二位置传感器得到,进而可以使得2D图像重建为3D模型,因此成本低,兼容性好,且当该装置被当安装至机械臂末端时,可减少机械臂的运动范围及运动精度的需求。
技术研发人员:白仲皖,鱼晨,谭婷姗
受保护的技术使用者:华力创科学(深圳)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!