行走训练康复系统
本发明涉及医疗康复设备领域,具体涉及一种行走训练康复系统。
背景技术:
1、神经重症,即因重型颅脑创伤、急性脑血管病变、颅内感染、颅内肿瘤、癫痫持续状态或其他神经系统疾病需要生命支持、医疗监测和治疗的患者,此类患者由于需要长时间的恢复周期,且在恢复期内均是卧床,在加上神经损伤,因此在病症恢复后大多存在行走困难的问题。
2、神经重症患者在治疗完成后就已经需要进行康复训练了,通常在术后的一个月内被称为急性期,大多仅能在床上或者设备上进行肢体的被动运动;通常2-6月的被称之为恢复期,在经历急性期的被动运动后,患者在恢复期其实已经具备部分支撑身体的力量,能够在拐杖或者其他辅助工具的带动下主动发力进行康复训练。
3、对于急性期的康复训练,目前已经针对性的研发了多种装置;例如,申请号为201810206304.1的一种人体下肢康复训练机器人,其主要由外骨骼动力装置、跑台、悬挂减重装置及其控制系统组成,其主要原理是由外骨骼动力装置带动患者的下肢在跑台上运动,再由悬挂减重装置降低患者自身承重,进而达到锻炼效果,然而此种方式患者是被动的被装置带动,悬挂减重装置也无法跟随患者锻炼时的体态变化进行调整,与实际行走相比,还原度不佳,对于患者行走平衡感的训练效果不够好。
技术实现思路
1、本发明意在提供一种行走训练康复系统,以帮助患者在恢复期主动的进行下肢康复训练,与实际的行走更加贴合,更有助患者行走的平衡感训练。
2、为达到上述目的,本发明采用如下技术方案:
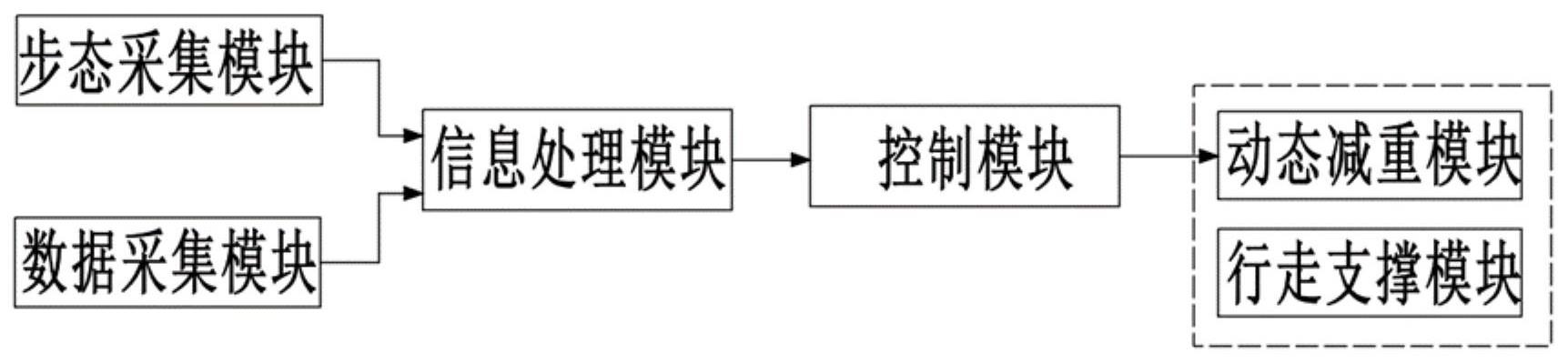
3、一种行走训练康复系统,包括步态采集模块、数据采集模块、信息处理模块、控制模块和行走支撑模块;所述步态采集单元用于采集患者在辅助装置带动下的第一步态参数;所述数据采集模块用于实时采集患者在实际康复训练时的第二步态参数;所述信息处理模块用于根据第一步态参数生成第一控制参数,还用于对所采集的第一步态参数和采集的第二步态参数进行实时分析对比,并基于实时分析对比的结果生成第二控制参数,并将生成的第一控制参数和第二控制参数传输给控制模块;所述控制模块根据控制参数生成控制指令,并基于控制指令对动态减重模块进行驱动,在患者训练过程中进行动态减重;所述行走支撑模块用于安装动态减重模块,还用于跟随患者移动,为患者提供行走支撑。
4、本方案的原理是:
5、先通过辅助装置,如下肢机器人或者外骨骼机器人帮助患者进行行走,步态采集模块基于患者在辅助装置带动行走时,采集患者行走时的第一步态参数,并将第一步态参数传递到信息处理模块;信息处理模块基于采集的第一步态参数生成第一控制参数,并将第一控制参数传递到控制模块,控制模块基于控制参数生成控制指令控制动态减重模块为患者在训练时精准的提供支撑力,行走支撑模块则带动动态减重模块在患者行走训练时跟随患者提供动态支撑,使患者能够较为自然的行走;在实际康复训练时,信息采集模块实时的采集患者康复训练过程中的第二步态参数,信息处理模块还对第二步态参数和第一步态参数进行分析比较,利用分析比较的结果生成第二控制参数,控制模块还根据第二控制参数生成新的控制指令对提供的助力进行动态的调整,以便于适应患者的实际行走状况;
6、本方案的优点是:
7、1、目前,虽然已经有了多种关于行走训练的康复设备,但是其大多采取的是利用装置或者设备带动患者进行康复训练,以达到帮助患者肌肉和神经恢复的目的;然而采用此种方式进行训练,患者大多是处于一种被动状态,对患者的主动发力需求较少,与实际的行走也存在较大的差异,对患者的行走平衡感恢复较差;相较而言,采用本方案所提供的行走训练康复系统,更多的是依靠于患者进行主动发力,而系统本身则是伴随患者实际行走时的步态或者体态变化提供合适的助力或是承载力,减轻患者对于自身的负重,帮助患者自主的行走,由患者主动行走的方式能够更好地锻炼患者行走时的平衡感。
8、2、本系统是基于患者在辅助装置带动下的步态参数提供助力数据,能够更加贴近于患者自然行走时对助力的需求,更有利于患者的行走恢复及行走中的平衡感恢复;在实际行走过程中,还实时的采集患者的第二步态参数对提供的承载力或助力进行微调,能够更精准的为患者提供助力帮助患者自主行走,效果更佳。
9、作为一种改进,所述辅助装置为用于带动患者自由行走的下肢外骨骼,所述步态参数包括辅助装置为患者行走提供的助力数据和患者行走时的体态变换参数;
10、本改进的有益效果在于:患者在恢复之前并不能独立进行行走,但是通过目前成熟的外骨骼能够带动患者自然行走,也能采集到患者自然行走所需的助力数据及患者自然行走时的体态变换参数,基于所采集到的第一步态参数而为患者在训练时提供助力,更佳精准,也不会对患者产生较大束缚,有利于患者的平衡感训练。
11、作为一种改进,所述行走支撑模块包括的竖向框架,所述竖向框架底部对称设置有两组行走底座,所述动态减重模块设置在竖向框架上;所述动态减重模块包括减重机构、悬架和悬吊背心带,所述悬架包括一体式设置的连接板和悬挂板,所述连接板安装在竖向框架上并可沿竖向框架滑动;
12、本改进的有益效果在于:在实际训练时,行走底座可以跟随患者进行移动方便为患者提供助力;患者实际行走时,肩部姿态会存在一定的高度变化,连接板跟随患者的肩部变化在竖向框架上移动,为患者的肩部在竖直方向的变化提供补偿,使患者行走更加自然。
13、作为一种改进,所述动态减重机构和悬架均为两组,对称的设置在竖向框架上。
14、作为一种改进,所述竖向框架上可拆卸的安装有手扶杆,所述手扶杆在竖向框架上的位置可调;
15、本改进的效果在于:针对于恢复情况较差的患者,手扶杆能够对患者起到一定的支撑作用,手扶杆的高度可以调节,能够适应于不同高度的患者。
16、作为一种改进,所述减重机构具体包括驱动电机、绞盘、滑轮组、牵引绳和拉力传感器;所述驱动电机的输出轴与绞盘连接,所述牵引绳一端缠绕在绞盘上,牵引绳的另一端通过滑轮组与悬挂背心带连接,所述拉力传感器设置在牵引绳与悬挂背心带连接的一侧。
17、作为一种改进,所述悬挂板上滑动连接有安装座,所述安装座固定设置有滑轮组的一个定滑轮,所述牵引绳通过安装座上的定滑轮与所述悬挂背心带连接;
18、本改进的有益效果在于:安装座能够带动定滑轮在悬挂板上进行移动,能够对患者行走时在水平方向的姿态变化进行补偿,提供的承载力在水平方向变化更小,承载效果也更加稳定,使患者的行走更加自然。
19、作为一种改进,还包括图像显示模块,所述图像显示模块用于显示患者的行走步态图像,所述图像显示模块包括图像采集单元、图像处理单元和图像显示单元,所述图像采集单元用于采集患者行走步态图像,所述图像处理单元用于将图像采集单元所采集的行走步态图像的格式和尺寸进行规格化。
技术特征:
1.一种行走训练康复系统,其特征在于:包括步态采集模块、数据采集模块、信息处理模块、控制模块和行走支撑模块;所述步态采集单元用于采集患者在辅助装置带动下的第一步态参数;所述数据采集模块用于实时采集患者在实际康复训练时的第二步态参数;所述信息处理模块用于根据第一步态参数生成第一控制参数,还用于对所采集的第一步态参数和采集的第二步态参数进行实时分析对比,并基于实时分析对比的结果生成第二控制参数,并将生成的第一控制参数和第二控制参数传输给控制模块;所述控制模块根据第一控制参数和第二控制参数生成控制指令,并基于控制指令对动态减重模块进行驱动,在患者训练过程中进行动态减重;所述行走支撑模块用于安装动态减重模块,还用于跟随患者移动,为患者提供行走支撑。
2.根据权利要求1所述的行走训练康复系统,其特征在于:所述辅助装置为用于带动患者自由行走的下肢外骨骼,所述第一步态参数包括辅助装置为患者行走提供的助力数据和患者在辅助装置带动行走时的体态变换参数。
3.根据权利要求1所述的行走训练康复系统,其特征在于:所述行走支撑模块包括的竖向框架,所述竖向框架底部对称设置有两组行走底座,所述动态减重模块设置在竖向框架上;所述动态减重模块包括减重机构、悬架和悬吊背心带,所述悬架包括一体式设置的连接板和悬挂板,所述连接板安装在竖向框架上并可沿竖向框架滑动。
4.根据权利要求3所述的行走训练康复系统,其特征在于:所述动态减重机构和悬架均为两组,对称的设置在竖向框架上。
5.根据权利要求3所述的行走训练康复系统,其特征在于:所述竖向框架上可拆卸的安装有手扶杆,所述手扶杆在竖向框架上的位置可调。
6.根据权利要求3所述的行走训练康复系统,其特征在于:所述减重机构具体包括驱动电机、绞盘、滑轮组、牵引绳和拉力传感器;所述驱动电机的输出轴与绞盘连接,所述牵引绳一端缠绕在绞盘上,牵引绳的另一端通过滑轮组与悬挂背心带连接,所述拉力传感器设置在牵引绳与悬挂背心带连接的一侧。
7.根据权利要求6所述的行走训练康复系统,其特征在于:所述悬挂板上滑动连接有安装座,所述安装座固定设置有滑轮组中的一个定滑轮,所述牵引绳通过安装座上的定滑轮与所述悬挂背心带连接。
8.根据权利要求1所述的行走训练康复系统,其特征在于:还包括图像显示模块,所述图像显示模块用于显示患者的行走步态图像,所述图像显示模块包括图像采集单元、图像处理单元和图像显示单元,所述图像采集单元用于采集患者行走步态图像,所述图像处理单元用于将图像采集单元所采集的行走步态图像的格式和尺寸进行规格化。
技术总结
本发明涉及医疗康复设备技术领域,公开了一种行走训练康复系统;主体方案包括步态采集模块,所述步态采集单元用于采集患者在辅助装置带动下的步态参数;动态减重模块,所述动态减重单元用于患者在进行训练康复时按照实际步态进行动态减重;行走支撑模块,所述行走支撑模块用于安装动态减重模块,还用于跟随患者移动,为患者提供行走支撑;信息处理模块,所述信息处理模块基于步态采集模块所采集的步态参数生成控制参数,并将控制参数传递给控制模块;控制模块,根据控制参数对动态减重模块进行控制,在患者运动过程中进行动态减重。与患者实际行走更加贴合,更有助于患者行走时的平衡感训练。
技术研发人员:李建萍,胡颖,唐斌
受保护的技术使用者:遵义市第一人民医院(遵义医学院第三附属医院)
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!