一种自适应式膝关节治疗软体机器人磁控系统
本发明涉及磁控医疗机器人领域,具体涉及一种自适应式膝关节治疗软体机器人磁控系统。
背景技术:
1、软体机器人具有灵活、自由度高等特点,使得其非常适合在人体相对封闭的狭窄空间或腔道进行治疗工作,尤其适于人体膝关节疾病的治疗。
2、软体机器人的磁控技术,具有控制精准、响应快、鲁棒性好等特点。通过控制空间内磁场的梯度大小和磁场方向,可以灵活地控制微机器人的运动方向和姿态。且由于通过外部磁场控制机器人,意味着微机器人内部无需集成电源或其他电路元件,不但有益于缩小微机器人尺寸,也提高了微机器人的生物相容性,降低了对人体的毒性。除此之外,磁场对人体的损伤较小且穿透性良好,使磁驱动微机器人能在更多的医疗场景下得到应用。
3、然而目前的磁控系统大多由多个固定的电磁线圈组成,其固有的刚性结构使得磁控系统的工作空间一经设计,就难以改变。且由于临床治疗上患者的膝关节尺寸,以及接受治疗时膝关节的弯曲形态各不相同,使得磁控系统的应用场景受到限制,阻碍了磁控微机器人系统迈向临床治疗的步伐。
4、因此,如何克服磁控系统的工作空间限制,实现动态的工作空间调节以及线圈空间分布的优化,是磁控软体机器人技术应用于临床的关键之一。
技术实现思路
1、针对现有技术不足,本发明提供了一种自适应式膝关节治疗磁控系统。
2、为实现上述目的,本发明的技术方案为:本发明提供了一种自适应式膝关节治疗软体机器人磁控系统,包括:
3、上位机,用于根据膝关节尺寸形态数据得到最优电磁线圈空间分布,并将其转换为电机运动量;
4、电磁线圈自适应调节模块,获取上位机发送的电机运动量,驱动电机使电磁铁运动至最优电磁线圈空间分布位置;
5、电磁线圈模块,获取上位机发送的使能信号,向各电磁线圈通流,产生耦合空间磁场;
6、软体机器人,基于电磁线圈模块产生的耦合空间磁场在膝关节腔内进行运动。
7、进一步地,上位机根据膝关节尺寸形态数据得到最优电磁线圈空间分布,并将其转换为电机运动量包括:
8、上位机获取患者的膝关节尺寸形态数据,通过粒子群优化算法将线圈磁场控制矩阵的最小奇异值作为优化目标,获得最佳电磁线圈空间分布;将计算得到的最佳电磁线圈空间分布转化为电机的运动量,并发送至电磁线圈自适应调节模块。
9、进一步地,上位机根据膝关节尺寸形态数据得到最优电磁线圈空间分布包括:
10、设不可动电磁线圈的位姿固定,将可动电磁线圈之间的距离和空间姿态作为边界条件带入粒子群优化算法中;
11、记电磁线圈的位姿可表示为(λisinθicosψi,λisinθisinψi,λisinθi,0,θi,ψi),其中,i=1,2,……,5;可动电磁线圈的编号为i=1~4,不可动电磁线圈的编号为i=5;(λisinθicosψi,λisinθisinψi,λisinθi)为电磁线圈的中心位置坐标,(0,θi,ψi)为电磁线圈的空间姿态;θi,ψi,λi分别为各电磁线圈的章动角、进动角和自身进给量;
12、以坐标原点以及其附近领域内n个点为优化点,设其中某一优化点坐标为(xop,yop,zop),可求得在电磁线圈局部坐标系下目标点的坐标(xi,l,yi,l,zi,l),表达式如下:
13、(xi,l,yi,l,zi,l)=(xop-λisinθicosψi,yop-λisinθisinψi,zop-λisinθi)·tri(0,θi,ψi),
14、计算单个电磁线圈在目标点的磁场强度矩阵:
15、bi=fcoil(xi,l,yi,l,zi,l)·tri-1(0,θi,ψi)
16、其中,fcoil为电磁线圈数学模型,tri(0,θi,ψi)为坐标变换矩阵;
17、得到磁场强度控制矩阵a3×5,对其进行奇异值分解可得(σ1,σ2,σ3);
18、对各个优化点进行重复计算,得到所有优化点对应的磁场强度控制矩阵的奇异值σ3;
19、记σ3min为所有奇异值σ3中的最小值,以最小奇异值σ3min作为优化目标,将可动线圈的位姿作为变量,通过粒子群优化算法求得最优电磁线圈布局。
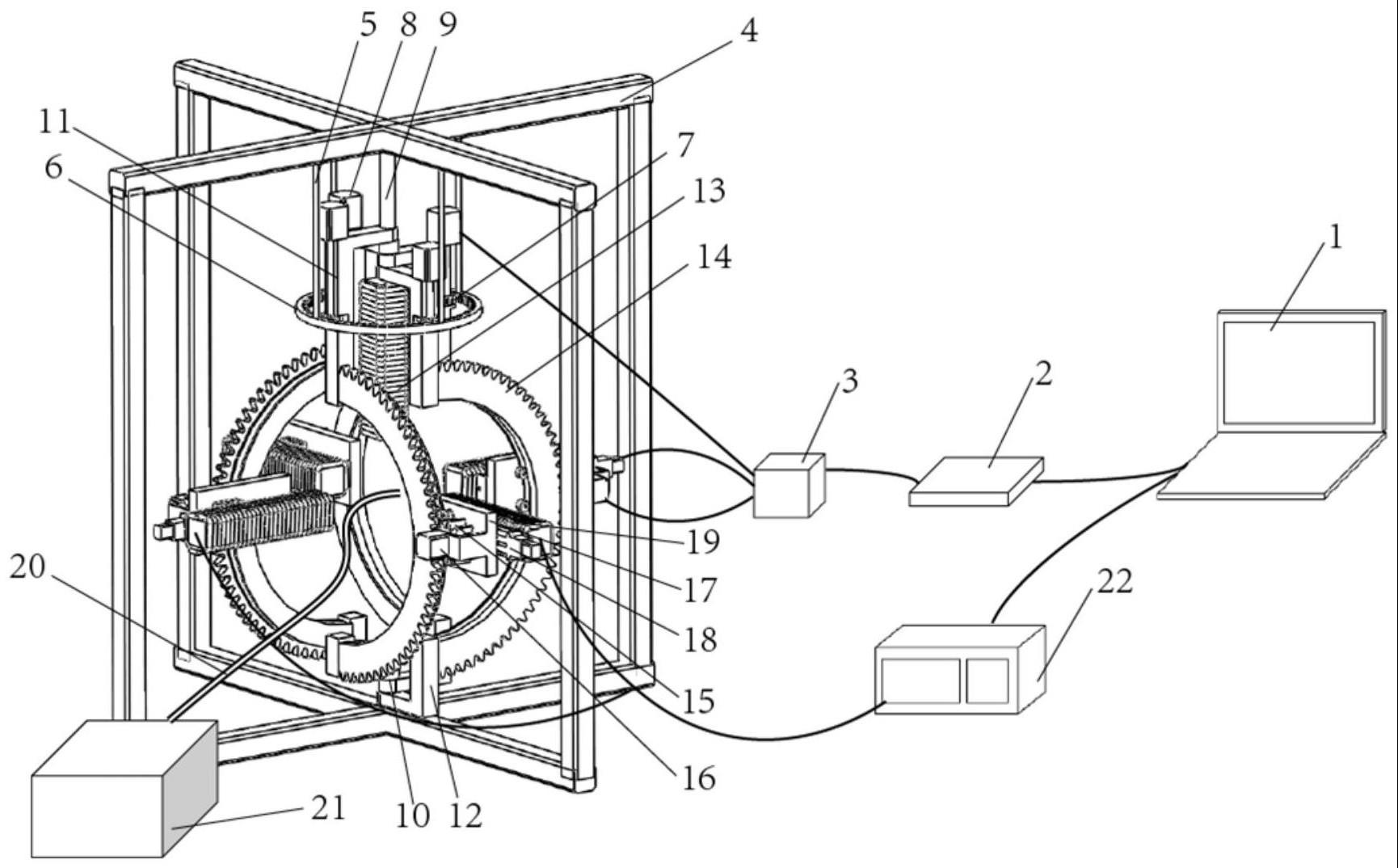
20、进一步地,电磁线圈自适应调节模块基于电磁线圈装置实现,所述电磁线圈装置包括:机架,机架的上部中心位置处设置有第一导向柱,第一导向柱上安装有不可动电磁线圈;机架的下部中心位置处设置有第二导向柱;在第一导向柱和第二导向柱间按圆周均匀分布有四个可动电磁线圈组件。
21、进一步地,可动电磁线圈组件包括:
22、第一电机,所述第一电机的输出轴与第二齿轮连接,第二齿轮与第一齿轮啮合,将第一齿轮的转动量变换转化为可动电磁线圈的进动角变化;
23、安装于第一导向柱上的上部l型连接杆;
24、安装于第二导向柱上的下部l型连接杆;
25、安装于上部l型连接杆与下部l型连接杆间的齿轮滑轨;
26、第二电机,所述第二电机的输出轴与第三齿轮连接,第三齿轮与齿轮滑轨上的外圈齿轮啮合,将齿轮滑轨上的外圈齿轮的转动量变换转化为可动电磁线圈的章动角变化;
27、电机滑轨,所述电机滑轨与可动电磁线圈相连,控制可动电磁线圈的进给量变化。
28、进一步地,所述第一齿轮通过四个按圆周均匀分布的支撑柱与机架连接。
29、进一步地,所述第二电机通过电机支架安装于连接板上,所述连接板上安装有电机滑轨。
30、进一步地,所述连接板和齿轮滑轨间还安装有若干个滚动轴承。
31、进一步地,所述电磁线圈模块具体包括:
32、将上位机发送的使能信号传输至可编程电源模组,可编程电源模组将使能信号转化为相应的电流通入各电磁线圈,产生耦合空间磁场,以控制软体机器人的运动。
33、进一步地,所述软体机器人上还安装有注射泵。
34、本发明的有益效果为:本发明提供了一种自适应式膝关节治疗软体机器人磁控系统,通过上位机根据膝关节尺寸形态数据得到最优电磁线圈空间分布,并将其转换为电机运动量,设置了一种电磁线圈装置以驱动电机运动将电机运动量转换为可动电磁线圈的章动角、进动角和自身进给量,使电磁铁运动至最优电磁线圈空间分布位置,实现磁控装置的自适应调节,解决了目前磁控系统受限于工作空间,造成其应用场景的限制,使得磁控系统能根据患者的实际膝关节尺寸与弯曲形态,进行动态的自适应调节。
技术特征:
1.一种自适应式膝关节治疗软体机器人磁控系统,其特征在于,包括:
2.根据权利要求1所述的自适应式膝关节治疗软体机器人磁控系统,其特征在于,上位机根据膝关节尺寸形态数据得到最优电磁线圈空间分布,并将其转换为电机运动量包括:
3.根据权利要求2所述的自适应式膝关节治疗软体机器人磁控系统,其特征在于,上位机根据膝关节尺寸形态数据得到最优电磁线圈空间分布包括:
4.根据权利要求1所述的自适应式膝关节治疗软体机器人磁控系统,其特征在于,电磁线圈自适应调节模块基于电磁线圈装置实现,所述电磁线圈装置包括:机架(4),机架(4)的上部中心位置处设置有第一导向柱(9),第一导向柱(9)上安装有不可动电磁线圈(13);机架(4)的下部中心位置处设置有第二导向柱(10);在第一导向柱(9)和第二导向柱(10)间按圆周均匀分布有四个可动电磁线圈组件。
5.根据权利要求4所述的自适应式膝关节治疗软体机器人磁控系统,其特征在于,可动电磁线圈组件包括:
6.根据权利要求5所述的自适应式膝关节治疗软体机器人磁控系统,其特征在于,所述第一齿轮(6)通过四个按圆周均匀分布的支撑柱(5)与机架(4)连接。
7.根据权利要求5所述的自适应式膝关节治疗软体机器人磁控系统,其特征在于,所述第二电机(16)通过电机支架安装于连接板(17)上,所述连接板(17)上安装有电机滑轨(18)。
8.根据权利要求7所述的自适应式膝关节治疗软体机器人磁控系统,其特征在于,所述连接板(17)和齿轮滑轨(14)间还安装有若干个滚动轴承。
9.根据权利要求1所述的自适应式膝关节治疗软体机器人磁控系统,其特征在于,所述电磁线圈模块具体包括:
10.根据权利要求1所述的自适应式膝关节治疗软体机器人磁控系统,其特征在于,所述软体机器人(20)上还安装有注射泵(21)。
技术总结
本发明公开了一种自适应式膝关节治疗软体机器人磁控系统,包括:上位机,用于根据膝关节尺寸形态数据得到最优电磁线圈空间分布,并将其转换为电机运动量;电磁线圈自适应调节模块,获取上位机发送的电机运动量,驱动电机使电磁铁运动至最优电磁线圈空间分布位置;电磁线圈模块,获取上位机发送的使能信号,向各电磁线圈通流,产生耦合空间磁场;软体机器人,基于电磁线圈模块产生的耦合空间磁场在膝关节腔内进行运动。
技术研发人员:胡松钰,胡家荣,崔武世,刘安,贺永,傅建中
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!