胶囊内镜与幽门的相对位置检测方法、控制器及系统与流程
本发明涉及计算机,尤其涉及一种胶囊内镜与幽门的相对位置检测方法、控制器、系统、电子设备及非暂态计算机可读存储介质。
背景技术:
1、相关应用于胃部检查的胶囊内镜主要为磁控胶囊内镜和体位变换引导胶囊内镜检查。在检查过程中,胶囊内镜相当于食物进入胃腔,胃腔进入消化期,发生胃蠕动。胃的蠕动发生在胃体下2/3和胃窦,开始于胃的中部,并向幽门方向推进。开始时,蠕动的幅度较弱,在传播的过程中,蠕动幅度逐渐加强,同时,频率也明显加快。在胃窦靠近幽门的一片区域,蠕动波的幅度和频率增加的速度是最高的,增加胃十二指肠的压力差,促进了固体或半固体从胃腔排入十二指肠。
2、目前胶囊内镜进入胃腔,胃的蠕动幅度和频率增强,尤其胃窦区域。在检查过程中,胶囊内镜容易受到胃蠕动的影响进入十二指肠,被动结束胃部胶囊内镜的检查,影响检查的完成度,浪费此次医疗开支。
技术实现思路
1、本发明提供一种胶囊内镜与幽门的相对位置检测方法、控制器、系统、电子设备及非暂态计算机可读存储介质,用以解决现有技术中胶囊内镜在胃腔内实时位置不可控的缺陷,实现实时跟踪定位胶囊内镜的移动位置,可根据胶囊内镜与幽门的相对位置关系控制受检者位姿或胶囊内镜行进路径的效果。
2、本发明提供一种胶囊内镜与幽门的相对位置检测方法,包括:
3、获取幽门信息、胶囊内镜在胃腔内的实时位置和获取胶囊内镜在胃腔内检测的实时压力值;
4、基于所述幽门信息、所述胶囊内镜在胃腔内的实时位置和所述胶囊内镜在胃腔内检测的实时压力值,确定所述胶囊内镜与所述幽门之间的实时相对关系;
5、所述幽门信息包括所述幽门的图像存在与否以及所述幽门的开闭状态。
6、根据本发明提供的一种胶囊内镜与幽门的相对位置检测方法,所述胶囊内镜与所述幽门之间的实时相对关系包括:
7、所述胶囊内镜到达所述幽门的实际时间;
8、和/或,
9、所述胶囊内镜与所述幽门之间的实际距离。
10、根据本发明提供的一种胶囊内镜与幽门的相对位置检测方法,所述基于所述幽门信息、所述胶囊内镜在胃腔内的实时位置和所述胶囊内镜在胃腔内检测的实时压力值,确定所述胶囊内镜与所述幽门之间的实时相对关系,包括:
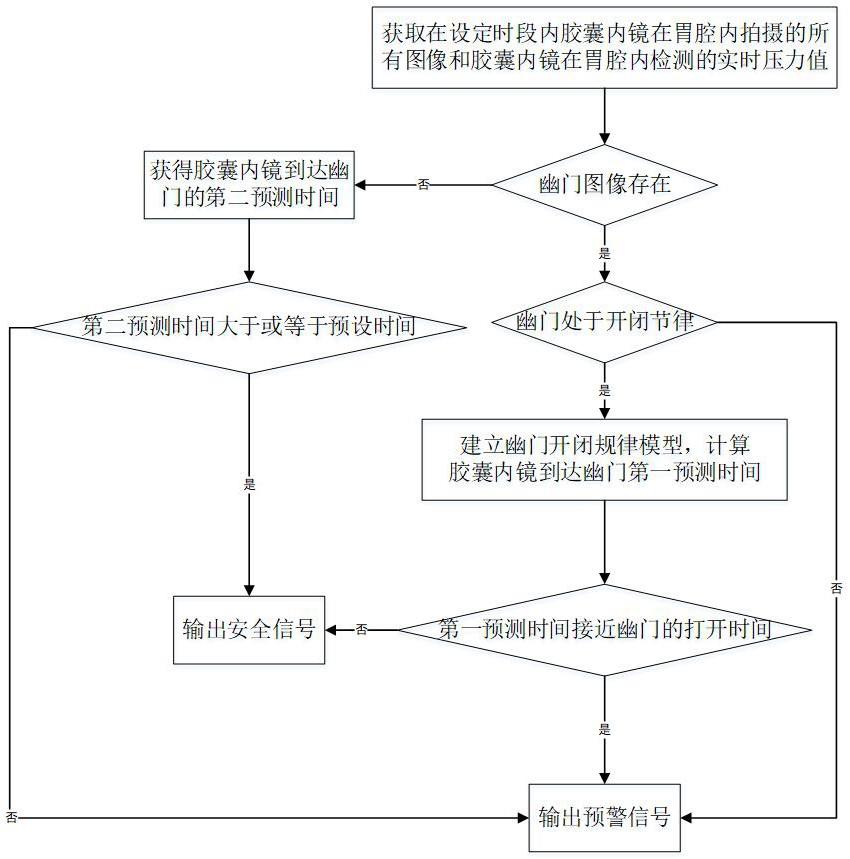
11、确定所述幽门的图像存在且所述幽门处于开闭节律;
12、基于所述胶囊内镜在胃腔内的实时位置和所述胶囊内镜在胃腔内检测的实时压力值,获得所述胶囊内镜到达所述幽门的第一预测时间。
13、根据本发明提供的一种胶囊内镜与幽门的相对位置检测方法,所述获得所述胶囊内镜到达所述幽门的第一预测时间后,包括:
14、建立幽门开闭规律模型;
15、基于所述幽门开闭规律模型,确定所述胶囊内镜到达所述幽门第一预测时间接近所述幽门的打开时间,输出预警信号,或,确定所述胶囊内镜到达所述幽门第一预测时间接近所述幽门的闭合时间,输出安全信号。
16、根据本发明提供的一种胶囊内镜与幽门的相对位置检测方法,所述基于所述幽门信息、所述胶囊内镜在胃腔内的实时位置和所述胶囊内镜在胃腔内检测的实时压力值,确定所述胶囊内镜与所述幽门之间的实时相对关系,包括:
17、确定所述幽门的图像不存在;
18、基于所述胶囊内镜在胃腔内的实时位置和所述胶囊内镜在胃腔内检测的实时压力值,获得所述胶囊内镜到达所述幽门的第二预测时间。
19、根据本发明提供的一种胶囊内镜与幽门的相对位置检测方法,所述获得所述胶囊内镜到达所述幽门的第二预测时间后,还包括:
20、确定所述胶囊内镜到达所述幽门的第二预测时间大于或等于预设时间,输出安全信号;
21、或,确定所述胶囊内镜到达所述幽门的第二预测时间小于预设时间,输出预警信号。
22、根据本发明提供的一种胶囊内镜与幽门的相对位置检测方法,所述基于所述幽门信息、所述胶囊内镜在胃腔内的实时位置和所述胶囊内镜在胃腔内检测的实时压力值,确定所述胶囊内镜与所述幽门之间的实时相对关系,包括:
23、确定所述幽门的图像存在且所述幽门为常开状态,输出预警信号。
24、根据本发明提供的一种胶囊内镜与幽门的相对位置检测方法,所述获取幽门信息和胶囊内镜在胃腔内的实时位置,包括:
25、获取在设定时段内所述胶囊内镜在胃腔内拍摄的所有图像;
26、基于卷积神经网络模型对在设定时段内所述胶囊内镜在胃腔内拍摄的所有图像进行处理,获得所述幽门信息和所述胶囊内镜在胃腔内的实时位置。
27、本发明还提供一种控制器,执行如上所述的胶囊内镜与幽门的相对位置检测方法,包括:
28、获取模块,用于获取幽门信息、胶囊内镜在胃腔内的实时位置和获取胶囊内镜在胃腔内检测的实时压力值;
29、处理模块,用于基于所述幽门信息、所述胶囊内镜在胃腔内的实时位置和所述胶囊内镜在胃腔内检测的实时压力值,确定所述胶囊内镜与所述幽门之间的实时相对关系;
30、所述幽门信息包括所述幽门的图像存在与否以及所述幽门的开闭状态。
31、本发明还提供一种胶囊内镜系统,包括:
32、如上所述的控制器;
33、胶囊内镜,所述胶囊内镜包括胶囊本体和设置于所述胶囊本体的压力传感器和拍摄器,所述压力传感器与所述拍摄器均与所述控制器连接。
34、本发明还提供一种电子设备,所述电子设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的胶囊内镜与幽门的相对位置检测方法。
35、本发明还提供一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质包括计算机程序,所述计算机程序被处理器执行时实现如上所述的胶囊内镜与幽门的相对位置检测方法。
36、本发明提供的胶囊内镜与幽门的相对位置检测方法,胶囊内镜进入胃腔后,基于获取到的幽门信息、胶囊内镜在胃腔内的实时位置和胶囊内镜在胃腔内检测的实时压力值,得到胶囊内镜与幽门的实时相对关系,以确定胶囊内镜在胃腔与幽门所处位置的准确相对关系,相当于通过幽门作为参照标准确定胶囊内镜的位置,便于实时跟踪定位胶囊内镜的移动位置,可根据胶囊内镜的实时位置控制受检者的位姿或胶囊内镜的行进路径。通过胶囊内镜与幽门的实时相对关系还可判断胶囊内镜在当前检测的时刻进入十二指肠的可能性,从而能够及时采取相应措施,确保胶囊内镜避免发生胶囊内镜进入十二指肠的事件发生。
37、除了上面所描述的本发明解决的技术问题、构成的技术方案的技术特征以及有这些技术方案的技术特征所带来的优点之外,本发明的其他技术特征及这些技术特征带来的优点,将结合附图作出进一步说明,或通过本发明的实践了解到。
技术特征:
1.一种胶囊内镜与幽门的相对位置检测方法,其特征在于:包括:
2.根据权利要求1所述的胶囊内镜与幽门的相对位置检测方法,其特征在于:所述胶囊内镜与所述幽门之间的实时相对关系包括:
3.根据权利要求1所述的胶囊内镜与幽门的相对位置检测方法,其特征在于:所述基于所述幽门信息、所述胶囊内镜在胃腔内的实时位置和所述胶囊内镜在胃腔内检测的实时压力值,确定所述胶囊内镜与所述幽门之间的实时相对关系,包括:
4.根据权利要求3所述的胶囊内镜与幽门的相对位置检测方法,其特征在于:所述获得所述胶囊内镜到达所述幽门的第一预测时间后,包括:
5.根据权利要求1所述的胶囊内镜与幽门的相对位置检测方法,其特征在于:所述基于所述幽门信息、所述胶囊内镜在胃腔内的实时位置和所述胶囊内镜在胃腔内检测的实时压力值,确定所述胶囊内镜与所述幽门之间的实时相对关系,包括:
6.根据权利要求5所述的胶囊内镜与幽门的相对位置检测方法,其特征在于:所述获得所述胶囊内镜到达所述幽门的第二预测时间后,还包括:
7.根据权利要求1所述的胶囊内镜与幽门的相对位置检测方法,其特征在于:所述基于所述幽门信息、所述胶囊内镜在胃腔内的实时位置和所述胶囊内镜在胃腔内检测的实时压力值,确定所述胶囊内镜与所述幽门之间的实时相对关系,包括:
8.根据权利要求1至7任意一项所述的胶囊内镜与幽门的相对位置检测方法,其特征在于:所述获取幽门信息和胶囊内镜在胃腔内的实时位置,包括:
9.一种控制器,其特征在于:执行权利要求1至8任意一项所述的胶囊内镜与幽门的相对位置检测方法,包括:
10.一种胶囊内镜系统,其特征在于:包括:
11.一种电子设备,所述电子设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于:所述处理器执行所述计算机程序时实现权利要求1至8任意一项所述的胶囊内镜与幽门的相对位置检测方法。
12.一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质包括计算机程序,其特征在于:所述计算机程序被处理器执行时实现权利要求1至8任意一项所述的胶囊内镜与幽门的相对位置检测方法。
技术总结
本发明涉及计算机技术领域,尤其涉及一种胶囊内镜与幽门的相对位置检测方法、控制器及系统,胶囊内镜与幽门的相对位置检测方法包括:获取幽门信息、胶囊内镜在胃腔内的实时位置和获取胶囊内镜在胃腔内检测的实时压力值;基于幽门信息、胶囊内镜在胃腔内的实时位置和胶囊内镜在胃腔内检测的实时压力值,确定胶囊内镜与幽门之间的实时相对关系;幽门信息包括幽门的图像存在与否以及幽门的开闭状态。确定胶囊内镜在胃腔与幽门所处位置的准确相对关系,相当于通过幽门作为参照标准确定胶囊内镜的位置,便于实时跟踪定位胶囊内镜的移动位置,可根据胶囊内镜与幽门之间的实时相对关系来控制受检者的位姿或胶囊内镜的行进路径。
技术研发人员:吴婉雯,王羽嗣,刘绍毅,招展鹏,周可,刘思德
受保护的技术使用者:广州思德医疗科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!