克氏针深度检测方法、系统与流程
本发明涉及医疗器械,特别涉及一种克氏针深度检测方法、系统。
背景技术:
1、克氏针是骨科手术中常用的内固定材料,当前手术中需要医生对克氏针进行反复调整及多次x线透视以保证达到满意的效果。当前手术机器人系统中使用光学或磁定位系统对安装在手术工具上的靶标进行跟踪来实现对克氏针深度的检测,同时也存在基于双目视觉的导航定位系统,通过视觉跟踪实现对克氏针的定位并引导自动置针。
2、但是,由于置针过程中克氏针会发生弯曲,从而使得上述方案对于克氏针深度的估计位置和实际位置产生偏差。轻则,需要反复调整克氏针的位姿增加手术时间和患者痛苦,重则可能导致手术的失败。
3、也就是说,现有技术中存在克氏针深度检测的结果与实际情况偏差较大的问题。
技术实现思路
1、本发明的目的在于提供一种克氏针深度检测方法、系统,以解决现有技术中存在的克氏针深度检测的结果与实际情况偏差较大的问题。
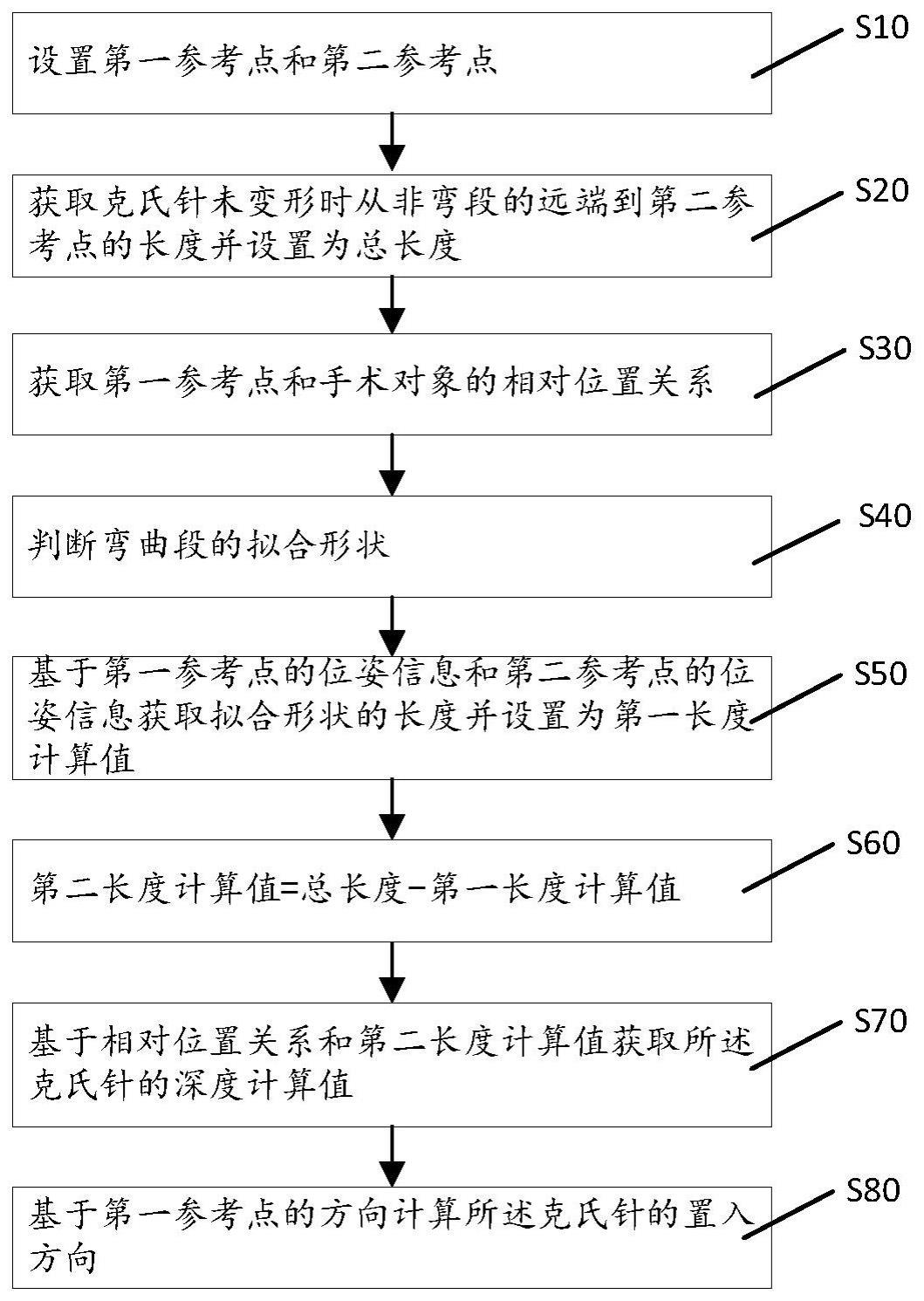
2、为了解决上述技术问题,根据本发明的第一个方面,提供了一种克氏针深度检测方法,所述克氏针深度检测方法包括如下步骤:设置第一参考点,所述第一参考点用于划分克氏针的非弯段和弯曲段;设置第二参考点,所述第二参考点用于表征所述弯曲段的另一个端点;获取所述克氏针未变形时从所述非弯段的远端到所述第二参考点的长度并设置为总长度;基于所述第一参考点的位姿信息和所述第二参考点的位姿信息,获取所述弯曲段的第一长度计算值;所述总长度减去所述第一长度计算值获取所述非弯段的第二长度计算值;以及,基于所述第二长度计算值获取所述克氏针的深度计算值。
3、可选的,所述克氏针基于动力工具和导向器工作,所述第一参考点为所述导向器的入针点,所述第二参考点为所述动力工具的出针点。
4、可选的,所述基于所述第一参考点的位姿信息和所述第二参考点的位姿信息,获取所述弯曲段的第一长度计算值的步骤包括:判断所述弯曲段的拟合形状,用于判断的信息中包括:所述第一参考点的位姿信息和所述第二参考点的位姿信息;以及,基于所述第一参考点的位姿信息和所述第二参考点的位姿信息获取所述拟合形状的长度并设置为所述第一长度计算值。
5、可选的,所述拟合形状的集合包括:线段和圆弧段。
6、可选的,所述拟合形状的集合仅包括:线段和圆弧段。
7、判断所述弯曲段的拟合形状的步骤包括:基于所述第一参考点的位姿信息获取所述克氏针在所述第一参考点的第一轴向;基于所述第二参考点的位姿信息获取所述克氏针在所述第二参考点的第二轴向;以及,若所述第一轴向和所述第二轴向同向或者所成角度在预设误差范围内,则判断所述拟合形状为线段,否则,判断所述拟合形状为圆弧段。
8、可选的,若所述拟合形状为圆弧段,所述基于所述第一参考点的位姿信息和所述第二参考点的位姿信息获取所述拟合形状的长度并设置为所述第一长度计算值的步骤包括:确定所述圆弧段所在的参考平面;过所述第一参考点在所述参考平面内做垂直于所述第一轴向的第一辅助线;过所述第二参考点在所述参考平面内做垂直于所述第二轴向的第二辅助线;所述第一辅助线和所述第二辅助线的交点被配置为所述圆弧段的圆心,所述圆弧段的圆心到所述第一参考点的距离或者到所述第二参考点的距离被配置为所述圆弧段的半径,所述第一辅助线和所述第二辅助线的夹角被配置为所述圆弧段的圆心角;基于所述圆弧段的圆心、半径和圆心角计算所述圆弧段的长度。
9、或者,若所述拟合形状为圆弧段,所述基于所述第一参考点的位姿信息和所述第二参考点的位姿信息获取所述拟合形状的长度并设置为所述第一长度计算值的步骤包括:确定所述圆弧段所在的参考平面;在所述参考平面内建立参考坐标系;基于所述第一参考点在所述参考坐标系中的坐标、所述第二参考点在所述参考坐标系中的坐标、所述第一轴向在所述参考坐标系中的数学表达和所述第二轴向在所述参考坐标系中的数学表达获取所述圆弧段的描述方程;基于所述圆弧段的描述方程以积分方式计算所述圆弧段的长度。
10、可选的,所述克氏针深度检测方法还包括如下步骤:获取所述第一参考点和手术对象的相对位置关系;基于所述相对位置关系和所述第二长度计算值获取所述克氏针的深度计算值。
11、可选的,所述克氏针深度检测方法还包括如下步骤:基于所述第一参考点的方向计算所述克氏针的置入角度。
12、可选的,所述克氏针深度检测方法还包括如下步骤:基于靶标和光学导航装置获取计算参数,所述计算参数包括:第一参考点的位姿信息、第二参考点的位姿信息、所述第一参考点和手术对象的相对位置关系、以及、所述克氏针未变形时从所述克氏针的尖端到所述第二参考点的长度。
13、为了解决上述技术问题,根据本发明的第二个方面,提供了一种克氏针深度检测系统,所述克氏针深度检测系统包括深度检测模块,所述深度检测模块用于基于第一参考点区分所述克氏针的非弯段和弯曲段;基于第二参考点确定所述弯曲段的另一个端点;获取所述克氏针未变形时从所述克氏针的尖端到所述第二参考点的长度并设置为总长度;基于所述第一参考点的位姿信息和所述第二参考点的位姿信息,获取所述弯曲段的第一长度计算值;所述总长度减去所述第一长度计算值获取所述非弯段的第二长度计算值;基于所述第二长度计算值获取所述克氏针的深度计算值。
14、可选的,所述克氏针基于动力工具和导向器工作,所述第一参考点为所述导向器的入针点,所述第二参考点为所述动力工具的出针点。
15、可选的,所述克氏针深度检测系统还包括患者图像配准模块和克氏针位置注册模块,所述深度检测模块还包括导航定位单元。
16、所述患者图像配准模块用于基于患者靶标和手术影像数据配准患者靶标空间坐标。
17、所述克氏针位置注册模块用于基于光学导航仪确定所述克氏针在一计算坐标系中的位姿。
18、所述导航定位单元用于实时检测所述克氏针的深度计算值和置入角度。
19、与现有技术相比,本发明提供的克氏针深度检测方法、系统中,所述克氏针深度检测方法包括如下步骤:设置第一参考点和第二参考点,以划分克氏针的非弯段和弯曲段;基于所述第一参考点的位姿信息和所述第二参考点的位姿信息,获取所述弯曲段的第一长度计算值,再与总长度进行计算获取所述非弯段的第二长度计算值;以及,基于所述第二长度计算值获取所述克氏针的深度计算值。以参考点的位姿信息计算弯曲段长度再计算得到非弯段的长度,最终得到深度检测结果,从而排除了克氏针因弯曲造成的估计误差,解决了现有技术中存在的克氏针深度检测的结果与实际情况偏差较大的问题。
技术特征:
1.一种克氏针深度检测方法,其特征在于,所述克氏针深度检测方法包括如下步骤:
2.根据权利要求1所述的克氏针深度检测方法,其特征在于,所述克氏针基于动力工具和导向器工作,所述第一参考点为所述导向器的入针点,所述第二参考点为所述动力工具的出针点。
3.根据权利要求1所述的克氏针深度检测方法,其特征在于,所述基于所述第一参考点的位姿信息和所述第二参考点的位姿信息,获取所述弯曲段的第一长度计算值的步骤包括:
4.根据权利要求3所述的克氏针深度检测方法,其特征在于,所述拟合形状的集合包括:线段和圆弧段。
5.根据权利要求3所述的克氏针深度检测方法,其特征在于,所述拟合形状的集合仅包括:线段和圆弧段;
6.根据权利要求5所述的克氏针深度检测方法,其特征在于,若所述拟合形状为圆弧段,所述基于所述第一参考点的位姿信息和所述第二参考点的位姿信息获取所述拟合形状的长度并设置为所述第一长度计算值的步骤包括:确定所述圆弧段所在的参考平面;过所述第一参考点在所述参考平面内做垂直于所述第一轴向的第一辅助线;过所述第二参考点在所述参考平面内做垂直于所述第二轴向的第二辅助线;所述第一辅助线和所述第二辅助线的交点被配置为所述圆弧段的圆心,所述圆弧段的圆心到所述第一参考点的距离或者到所述第二参考点的距离被配置为所述圆弧段的半径,所述第一辅助线和所述第二辅助线的夹角被配置为所述圆弧段的圆心角;基于所述圆弧段的圆心、半径和圆心角计算所述圆弧段的长度;
7.根据权利要求1所述的克氏针深度检测方法,其特征在于,所述克氏针深度检测方法还包括如下步骤:
8.根据权利要求1所述的克氏针深度检测方法,其特征在于,所述克氏针深度检测方法还包括如下步骤:
9.根据权利要求1~8中任一项所述的克氏针深度检测方法,其特征在于,所述克氏针深度检测方法还包括如下步骤:
10.一种克氏针深度检测系统,其特征在于,所述克氏针深度检测系统包括深度检测模块,所述深度检测模块用于基于第一参考点区分所述克氏针的非弯段和弯曲段;基于第二参考点确定所述弯曲段的另一个端点;获取所述克氏针未变形时从所述克氏针的尖端到所述第二参考点的长度并设置为总长度;基于所述第一参考点的位姿信息和所述第二参考点的位姿信息,获取所述弯曲段的第一长度计算值;所述总长度减去所述第一长度计算值获取所述非弯段的第二长度计算值;基于所述第二长度计算值获取所述克氏针的深度计算值。
11.根据权利要求10所述的克氏针深度检测系统,其特征在于,所述克氏针基于动力工具和导向器工作,所述第一参考点为所述导向器的入针点,所述第二参考点为所述动力工具的出针点。
12.根据权利要求10所述的克氏针深度检测系统,其特征在于,所述克氏针深度检测系统还包括患者图像配准模块和克氏针位置注册模块,所述深度检测模块还包括导航定位单元;
技术总结
本发明提供了一种克氏针深度检测方法、系统。其中,所述克氏针深度检测方法包括如下步骤:设置第一参考点和第二参考点,以划分克氏针的非弯段和弯曲段;基于所述第一参考点的位姿信息和所述第二参考点的位姿信息,获取所述弯曲段的第一长度计算值,再与总长度进行计算获取所述非弯段的第二长度计算值;以及,基于所述第二长度计算值获取所述克氏针的深度计算值。以参考点的位姿信息计算弯曲段长度再计算得到非弯段的长度,最终得到深度检测结果,从而排除了克氏针因弯曲造成的估计误差,解决现有技术中存在的克氏针深度检测的结果与实际情况偏差较大的问题。
技术研发人员:请求不公布姓名
受保护的技术使用者:苏州微创畅行机器人有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!