一种机器人系统及其手术机器人的制作方法
本发明涉及腔道手术设备领域,特别是涉及一种手术机器人。此外,本发明还涉及一种包括上述手术机器人的机器人系统。
背景技术:
1、腹腔镜手术是一门新发展起来的微创方法,是未来手术方法发展的一个必然趋势。
2、现有技术中,腹腔镜手术一般是采用多腔道的手术方式,内窥镜和手术器械分别经过不同的腔道进入患者体内;这样的手术方式需要在患者身上开多个腔道不利于患者后续恢复,另外内窥镜和手术器械相互独立,不利于医生观察病灶及手术操作;并且,现有技术中的内窥镜和手术器械分别由不同的机构控制,内窥镜和手术器械相互独立,不利于医生观察病灶的同时,进行手术操作。
3、因此,如何降低对患者的损伤,利于患者术后修复,是本领域技术人员目前需要解决的技术问题。
技术实现思路
1、本发明的目的是提供一种手术机器人,该手术机器人可有效减少患者身体上的腔道数量,有利于患者的术后恢复。本发明的另一目的是提供一种包括上述手术机器人的机器人系统。
2、为实现上述目的,本发明提供如下技术方案:
3、一种手术机器人,包括:
4、机械臂;
5、穿刺器,设于所述机械臂上,所述穿刺器用于创建通过患者组织并进入患者内部腔体的通道;
6、手术器械,穿过所述通道进入所述患者内部腔体,且所述手术器械可沿所述通道的轴线方向运动;
7、图像采集机构,所述图像采集机构包括图像采集传感器,所述图像采集传感器可穿过所述通道进入所述患者的内部腔体,并可沿所述通道的轴线方向运动。
8、优选地,还包括限位件,所述限位件与所述穿刺器可拆卸连接;所述限位件用于在所述图像采集传感器沿所述通道的轴线方向运动至目标位置时,限制所述图像采集机构在所述通道的轴线方向的位置。
9、优选地,所述限位件包括:底座、采集机构锁紧件和穿刺器锁紧件,所述采集机构锁紧件用于锁紧所述图像采集机构,所述穿刺器锁紧件用于与所述穿刺器连接,所述采集机构锁紧件和所述穿刺器锁紧件均位置可调的安装在所述底座上。
10、优选地,所述采集机构锁紧件的第一侧与所述底座固定连接,第二侧与所述底座之间通过螺杆连接,所述螺杆可转动以带动所述采集机构锁紧件的第二侧朝向远离或靠近所述底座的方向移动。
11、优选地,所述穿刺器靠近所述限位件的端部设有环形凹槽,所述穿刺器锁紧件可与所述环形凹槽卡接,以对所述限位件进行轴向限位;所述环形凹槽与所述穿刺器锁紧件之间还设有沿所述穿刺器的轴向延伸的限位凸台和限位凹槽,以对所述限位件进行周向限位。
12、优选地,所述穿刺器锁紧件的中部设有穿刺器固定腔,所述穿刺器固定腔的两侧与所述底座之间通过卡扣可拆卸连接。
13、优选地,所述穿刺器锁紧件的两侧分别设有连接腿,所述底座内设有卡扣组件,所述连接腿可插入所述底座内部并与所述卡扣组件卡接。
14、优选地,所述卡扣组件包括第一卡扣本体、第二卡扣本体以及弹性部件,所述弹性部件安装在所述第一卡扣本体与所述第二卡扣本体之间;所述连接腿包括第一连接腿和第二连接腿,所述第一连接腿与所述第一卡扣本体卡接,所述第二连接腿与所述第二卡扣本体卡接;所述第一卡扣本体与所述第二卡扣本体可通过按压实现对所述第一连接腿和所述第二连接腿的解锁。
15、优选地,所述底座的两侧还设有避让槽,所述第一卡扣本体与所述第二卡扣本体的相互背离的端部分别从所述底座左右两侧的避让槽内伸出,以便按压所述第一卡扣本体与所述第二卡扣本体。
16、优选地,所述第一卡扣本体与所述第二卡扣本体相互背离的一侧均设有卡扣导入斜面和卡扣卡接台阶,所述第一连接腿与所述第二连接腿相互靠近的一侧均设有腿导入斜面和腿卡接台阶,所述卡扣导入斜面与所述腿导入斜面相互靠近时,会推动所述第一卡扣本体与所述第二卡扣本体朝向相互靠近的方向移动。
17、优选地,所述底座内设有空腔,所述第一卡扣本体、所述第二卡扣本体以及所述弹性部件均安装在所述空腔内,所述底座的顶部还设有供所述第一连接腿和所述第二连接腿插入至所述空腔中的通孔,所述底座的底部设有底部盖板。
18、本发明还提供一种机器人系统,包括上述任意一项所述的手术机器人。
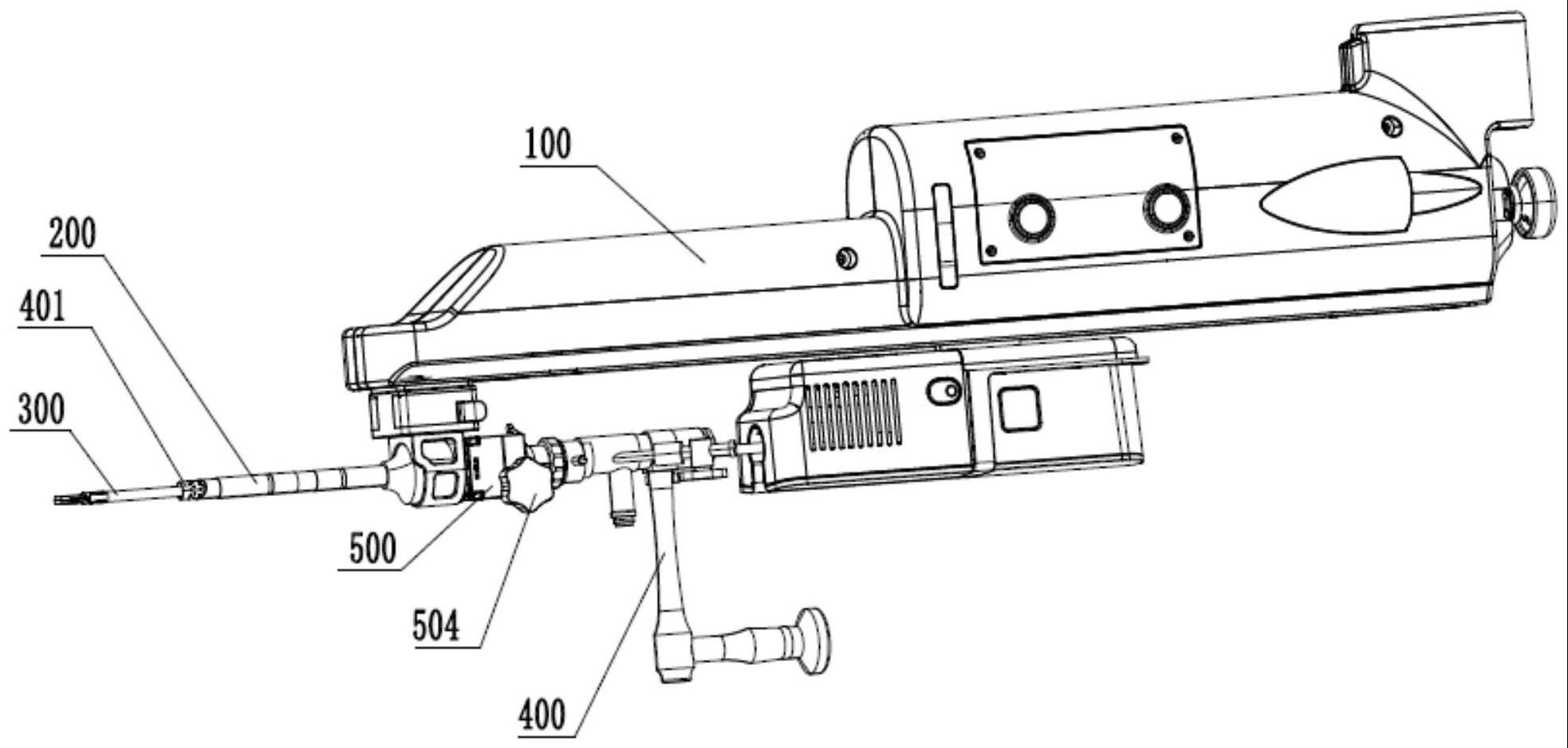
19、本发明所提供的手术机器人包括:机械臂;穿刺器,设于所述机械臂上,所述穿刺器用于创建通过患者组织并进入患者内部腔体的通道;手术器械,穿过所述通道进入所述患者内部腔体,且所述手术器械可沿所述通道的轴线方向运动;图像采集机构,所述图像采集机构包括图像采集传感器,所述图像采集传感器可穿过所述通道进入所述患者的内部腔体,并可沿所述通道的轴线方向运动。本发明所提供的手术机器人,通过将所述图像采集机构与所述手术器械集成在同一个所述通道内,减少患者身体上的腔道数量,更加有利于患者术后恢复。
20、在一种优选实施方式中,还包括限位件,所述限位件与所述穿刺器可拆卸连接;所述限位件用于在所述图像采集传感器沿所述通道的轴线方向运动至目标位置时,限制所述图像采集机构在所述通道的轴线方向的位置。上述设置,利用所述限位件将所述图像采集机构安装在所述穿刺器上,不仅可以利用所述机械臂实现对所述图像采集传感器和所述穿刺器的同步移动,而且可以快速对所述图像采集传感器进行锁止,方便所述图像采集传感器的安装,提高装配效率,节省拆装时间。
21、本发明所提供的机器人系统设有上述手术机器人,由于所述手术机器人具有上述技术效果,因此,设有该手术机器人的机器人系统也应当具有相应的技术效果。
技术特征:
1.一种手术机器人,其特征在于,包括:
2.根据权利要求1所述的手术机器人,其特征在于,还包括限位件(500),所述限位件(500)与所述穿刺器(200)可拆卸连接;所述限位件(500)用于在所述图像采集传感器沿所述通道的轴线方向运动至目标位置时,限制所述图像采集机构(400)在所述通道的轴线方向的位置。
3.根据权利要求2所述的手术机器人,其特征在于,所述限位件(500)包括:底座(501)、采集机构锁紧件(502)和穿刺器锁紧件(503),所述采集机构锁紧件(502)用于锁紧所述图像采集机构(400),所述穿刺器锁紧件(503)用于与所述穿刺器(200)连接,所述采集机构锁紧件(502)和所述穿刺器锁紧件(503)均位置可调的安装在所述底座(501)上。
4.根据权利要求3所述的手术机器人,其特征在于,所述采集机构锁紧件(502)的第一侧与所述底座(501)固定连接,第二侧与所述底座(501)之间通过螺杆(505)连接,所述螺杆(505)可转动以带动所述采集机构锁紧件(502)的第二侧朝向远离或靠近所述底座(501)的方向移动。
5.根据权利要求4所述的手术机器人,其特征在于,所述穿刺器(200)靠近所述限位件(500)的端部设有环形凹槽(200-1),所述穿刺器锁紧件(503)可与所述环形凹槽(200-1)卡接,以对所述限位件(500)进行轴向限位;所述环形凹槽(200-1)与所述穿刺器锁紧件(503)之间还设有沿所述穿刺器(200)的轴向延伸的限位凸台(200-2)和限位凹槽(503-1),以对所述限位件(500)进行周向限位。
6.根据权利要求3至5任意一项所述的手术机器人,其特征在于,所述穿刺器锁紧件(503)的中部设有穿刺器(200)固定腔,所述穿刺器(200)固定腔的两侧与所述底座(501)之间通过卡扣可拆卸连接。
7.根据权利要求6所述的手术机器人,其特征在于,所述穿刺器锁紧件(503)的两侧分别设有连接腿,所述底座(501)内设有卡扣组件,所述连接腿可插入所述底座(501)内部并与所述卡扣组件卡接。
8.根据权利要求7所述的手术机器人,其特征在于,所述卡扣组件包括第一卡扣本体(506)、第二卡扣本体(507)以及弹性部件(508),所述弹性部件(508)安装在所述第一卡扣本体(506)与所述第二卡扣本体(507)之间;所述连接腿包括第一连接腿和第二连接腿,所述第一连接腿与所述第一卡扣本体(506)卡接,所述第二连接腿与所述第二卡扣本体(507)卡接;所述第一卡扣本体(506)与所述第二卡扣本体(507)可通过按压实现对所述第一连接腿和所述第二连接腿的解锁。
9.根据权利要求8所述的手术机器人,其特征在于,所述底座(501)的两侧还设有避让槽,所述第一卡扣本体(506)与所述第二卡扣本体(507)的相互背离的端部分别从所述底座(501)左右两侧的避让槽内伸出,以便按压所述第一卡扣本体(506)与所述第二卡扣本体(507)。
10.根据权利要求9所述的手术机器人,其特征在于,所述第一卡扣本体(506)与所述第二卡扣本体(507)相互背离的一侧均设有卡扣导入斜面(506-1)和卡扣卡接台阶(506-2),所述第一连接腿与所述第二连接腿相互靠近的一侧均设有腿导入斜面和腿卡接台阶,所述卡扣导入斜面(506-1)与所述腿导入斜面相互靠近时,会推动所述第一卡扣本体(506)与所述第二卡扣本体(507)朝向相互靠近的方向移动。
11.根据权利要求8所述的手术机器人,其特征在于,所述底座(501)内设有空腔,所述第一卡扣本体(506)、所述第二卡扣本体(507)以及所述弹性部件(508)均安装在所述空腔内,所述底座(501)的顶部还设有供所述第一连接腿和所述第二连接腿插入至所述空腔中的通孔,所述底座(501)的底部设有底部盖板。
12.一种机器人系统,包括手术机器人,其特征在于,所述手术机器人为权利要求1至11任意一项所述的手术机器人。
技术总结
本发明公开了一种手术机器人及机器人系统,手术机器人包括:机械臂;穿刺器,设于机械臂上,穿刺器用于创建通过患者组织并进入患者内部腔体的通道;手术器械,穿过通道进入患者内部腔体,且手术器械可沿通道的轴线方向运动;图像采集机构,图像采集机构包括图像采集传感器,图像采集传感器可穿过通道进入患者的内部腔体,并可沿通道的轴线方向运动。本发明所提供的手术机器人,通过将图像采集机构与手术器械集成在同一个通道内,减少患者身体上的腔道数量,更加有利于患者术后恢复。
技术研发人员:李耀,陈建平,王鹏
受保护的技术使用者:成都博恩思医学机器人有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!