一种三自由度手腕康复训练装置
背景技术:
1、在人类对工具的使用能力离不开对于腕部的精细掌控,在日常活动上肢时,腕部是最容易受到损伤的部位之一,如骨折、中风、偏瘫或肌张力高等原因均会导致腕部功能障碍或丧失,手腕功能障碍或丧失会给生活带来极大不便,而手腕康复装置可以辅助患者进行有效的腕部训练,进而帮助患者恢复正常的腕功能。
2、然而市面上针对腕部功能康复训练的产品较少,且现有腕部康复训练装置仍存在进步空间。例如有些产品实现的自由度训练数目不足三个;其次已有的腕部康复装置在对于手腕内旋/外旋运动的训练时,大多是通过前臂的旋转带动手腕的旋转,对于手腕而言并没有起到充分的训练作用;此外,在进行腕部的掌屈/背伸以及腕部的尺偏/桡偏训练时,大多是靠手指握住手柄,手指发力带动手腕运动,但研究表明手握拳时手腕可摆动135°,而当手指伸开时手腕可摆动150°,说明手指处于放松状态下进行的腕部康复训练效果更佳;最后,手腕可旋转的角度有范围限制,现有产品在限制转动角度范围时不够精确,可能会对手腕造成伤害。
技术实现思路
1、针对上述问题,本发明提供一种三自由度手腕康复训练装置。该康复训练装置为具有三个独立自由度的训练装置,可以实现腕部的内旋/外旋、掌屈/背伸和尺偏/桡偏的独立或复合运动,可以提供多种腕部康复训练方式,满足手腕康复训练的多种需求。
2、本发明解决其技术问题所采用的技术方案是:一种三自由度手腕康复训练装置,其特征在于:包含安装架、框架、肘关节承托机构、手掌组合机构和手腕联合康复机构。
3、所述手腕联合康复机构具有三个旋转自由度,分别由三个传动系统实现:第一传动系统、第二传动系统和第三传动系统;所述第一传动系统通过所述框架驱动手掌组合机构带动手腕作内旋或外旋运动;所述第二传动系统布置在框架上,用于驱动布置在框架上的手掌组合机构带动手腕作掌屈或背伸运动;所述第三传动系统布置在手掌组合机构上,并驱动手掌组合机构带动手腕作尺偏或桡偏运动。
4、进一步地,所述第一传动系统包含安装在所述安装架上的第一电机架、安装在所述第一电机架上的第一电机、安装在所述第一电机的输出轴上的第一小提升带轮、通过行星同步带与所述第一小提升带轮相连的第一大提升带轮、安装在所述安装架上的支撑架、与所述第一大提升带轮通过传动轴同轴设置的太阳轮、与所述太阳轮外啮合连接的三个行星轮、与所述行星轮内啮合连接的齿圈。
5、进一步地,所述第二传动系统是对称设置在所述手掌组合机构两侧的传动结构,包含安装在所述框架上的两个第二电机架、安装在所述两个第二电机架上的两个第二电机、安装在所述第二电机的输出轴上的第二小提升带轮、通过同步带与所述第二小提升带轮相连的第二大提升带轮、所述第二大提升带轮通过转向装置与第二同步带带传动连接,与所述第二同步带相连的带夹紧。
6、进一步地,所述第三传动系统包含安装在所述框架上的轴承座、安装在所述轴承座的两侧轴承并通过手托转轴与连接件铰接、安装在第三电机架上的第三电机、安装在所述第三电机的输出轴上的蜗杆、与所述蜗杆啮合的蜗轮、与蜗轮轴带传动连接的带轮、与所述带轮同轴的小齿轮、与所述小齿轮内啮合连接的大齿轮;固定安装在所述大齿轮上的钢珠挡板;所述钢珠挡板内含钢珠。
7、进一步地,所述肘关节承托机构包含安装在所述安装架上的燕尾槽滑轨、滑动安装在所述燕尾槽滑轨上的滑块、安装在所述滑块上的肘关节支撑架、安装在所述肘关节支撑架上的肘关节支撑底座、控制所述滑块移动的丝杠和调节旋钮。
8、进一步地,所述手掌组合机构包含手掌托架、绑带、手掌托架轴承、拉杆;所述手掌托架上设置有用于固定手指和手掌的绑带;所述手掌底板上设置有所述钢珠滚动的凹槽;手掌托架与所述手掌底板中间设置所述手掌托架轴承;所述拉杆安装在所述手掌底板上并与所述带夹紧固定连接。
9、进一步地,所述框架包含减速器连接板、横竖板架、外圈轴承;所述横竖板架一侧固定安装在所述减速器连接板,另一侧固定安装在所述外圈轴承。
10、进一步地,所述转向装置包含z轴轴承座、带轮轴、小带轮;所述z轴轴承座固定安装在所述横竖板架。
11、本发明与现有技术相比,具有以下有益效果:
12、(1)本发明的手腕康复训练装置具有三个旋转自由度,三个旋转自由度分别由三个传动系统负责,第一传动系统应用轮系结构实现手腕的内旋或外旋运动;第二传动系统两侧对称设置同步带实现手腕的掌屈或背伸运动;第三传动系统应用蜗轮蜗杆和齿轮传动实现手腕的尺偏或桡偏运动。本发明可分别实现腕部的内旋/外旋、掌屈/背伸和尺偏/桡偏,也可以同时实现两种或三种复合运动,提供多种腕部康复训练方式,可以满足手腕康复训练的多种需求。
13、(2)本发明的手腕康复训练装置的第一传动系统应用轮系结构获得较大的传动比、满足变速和变向的要求,实现腕关节的内旋或外旋运动。
14、(3)本发明的手腕康复训练装置的第二传动系统两侧对称设置传动比恒定的同步带,更平稳地带动手掌组合机构上下转动,实现腕关节的掌屈或背伸运动。
15、(4)本发明的手腕康复训练装置的第三传动系统应用传动精度高的齿轮传动实现腕关节的尺偏或桡偏运动,且应用蜗轮蜗杆使得腕关节在冠状面上内收或外展时可以在任意位置实现自锁,使手腕可以保持在其训练阶段内可转动的最大角度,保持训练角度,拉伸肌肉以缓解肌肉张力,此外手掌底板上设有滑槽完全满足腕关节活动度的范围,限制范围避免二次伤害。
16、(5)本发明的手腕康复训练装置的手掌托架使手指处于放松状态下进行康复训练,使手腕达到可摆动的最大范围,充分满足训练需求。
技术特征:
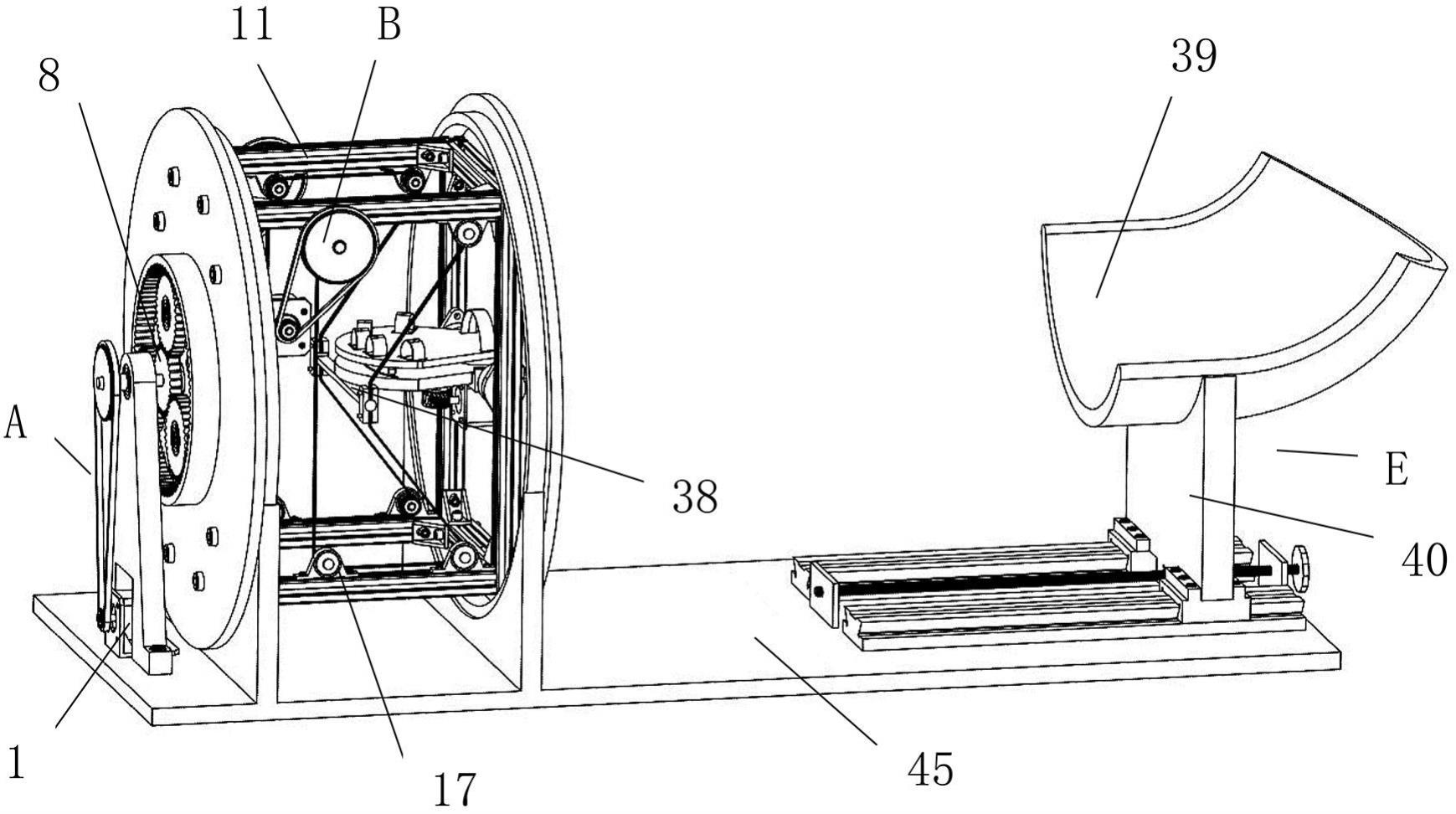
1.一种三自由度手腕康复训练装置,其特征在于:包含安装架(45)、框架(11)、肘关节承托机构(e)、手掌组合机构(d)和手腕联合康复机构;
2.根据权利要求1所述的一种三自由度手腕康复训练装置,其特征在于:所述第一传动系统(a)包含安装在所述安装架(45)上的第一电机架(2)、安装在所述第一电机架(2)上的第一电机(1)、安装在所述第一电机(1)输出轴上的第一小提升带轮(4)、通过行星同步带(5)与所述第一小提升带轮(4)相连的第一大提升带轮(6)、安装在所述安装架(45)上的支撑架(3)、与所述第一大提升带轮(6)通过传动轴(7)同轴设置的太阳轮(8)、与所述太阳轮(8)外啮合连接的三个行星轮(9)、与所述行星轮(9)内啮合连接的齿圈(10)。
3.根据权利要求1所述的一种三自由度手腕康复训练装置,其特征在于:所述第二传动系统(b)是对称设置在所述手掌组合机构(d)两侧的传动结构,包含安装在所述框架(11)上的两个第二电机架(13)、安装在所述两个第二电机架(13)上的两个第二电机(12)、安装在所述第二电机(12)输出轴上的第二小提升带轮 (14)、通过第一同步带(15)与所述第二小提升带轮(14)相连的第二大提升带轮 (16)、所述第二大提升带轮(16)通过转向装置(17)与第二同步带(18)带传动连接、与所述第二同步带(18)相连的带夹紧(19)。
4.根据权利要求1所述的一种三自由度手腕康复训练装置,其特征在于:所述第三传动系统(c)包含安装在所述框架(11)上的轴承座(33)、安装在所述轴承座(33)的两侧轴承(32)并通过手托转轴(31)与连接件(30)铰接、安装在第三电机架(21)上的第三电机(20)、安装在所述第三电机(20)输出轴上的蜗杆(22)、与所述蜗杆(22)啮合的蜗轮(23)、与蜗轮轴(24)带传动连接的带轮(25)、与所述带轮(25)同轴的小齿轮(26)、与所述小齿轮(26)内啮合连接的大齿轮(27);固定安装在所述大齿轮(27)上的钢珠挡板(28);所述钢珠挡板(28)内含钢珠(29)。
5.根据权利要求1所述的一种三自由度手腕康复训练装置,其特征在于:所述肘关节承托机构(e)包含安装在所述安装架(45)上的燕尾槽滑轨(44)、滑动安装在所述燕尾槽滑轨(44)上的滑块(41)、安装在所述滑块(41)上的肘关节支撑架(40)、安装在所述肘关节支撑架(40)上的肘关节支撑底座(39)、控制所述滑块移动的丝杠(42)和调节旋钮(43)。
6.根据权利要求3所述的一种三自由度手腕康复训练装置,其特征在于:所述手掌组合机构(d)包含手掌托架(34)、绑带(35)、手掌托架轴承(37)、拉杆(38);所述手掌托架(34)上设置有用于固定手指和手掌的绑带(35);所述手掌底板(36)上设置有所述钢珠(29)滚动的凹槽;手掌托架(34)与所述手掌底板(36)中间设置所述手掌托架轴承(37);所述拉杆(38)安装在所述手掌底板(36)上并与所述带夹紧(19)固定连接。
7.根据权利要求3所述的一种三自由度手腕康复训练装置,其特征在于:所述框架(11)包含减速器连接板(1101)、横竖板架(1102)、外圈轴承(1103);所述横竖板架(1102)一侧固定安装在所述减速器连接板(1101),另一侧固定安装在所述外圈轴承(1103)。
8.根据权利要求3所述的一种三自由度手腕康复训练装置,其特征在于:所述转向装置(17)包含z轴轴承座(1701)、带轮轴(1702)、小带轮(1703);所述z轴轴承座(1701)固定安装在所述横竖板架(1102)。
技术总结
本发明提供一种三自由度手腕康复训练装置,包括安装架、框架、肘关节承托机构、手掌组合机构和手腕联合康复机构。本发明的手腕训练康复装置具有三个旋转自由度,且三个旋转自由度分别由三个传动系统负责,第一传动系统应用轮系结构实现手腕的内旋或外旋运动;第二传动系统两侧对称设置同步带实现手腕的掌屈或背伸运动;第三传动系统应用蜗轮蜗杆和齿轮传动实现手腕的尺偏或桡偏运动。本发明为一种三自由度的手腕康复训练装置,可分别实现腕部的内旋/外旋、掌屈/背伸和尺偏/桡偏,也可以同时实现两种或三种复合运动,提供多种腕部康复训练方式,可以满足手腕康复训练的多种需求。
技术研发人员:艾尔肯·亥木都拉,周凯,汤碗莹
受保护的技术使用者:新疆大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!