一种七自由度外骨骼上肢康复机器人
本发明属于医疗康复机械,尤其涉及一种七自由度外骨骼上肢康复机器人。
背景技术:
1、脑卒中会导致患者失去对肌肉的控制,认知能力也会出现障碍,从而导致患者丧失肢体的运动功能,其中,上肢瘫痪是脑卒中后的常见症状。此外,由于意外事故造成的上肢功能障碍患者的人数也非常庞大,若没有及时对患者进行康复治疗,会导致其永久失去上肢的运动能力。
2、根据神经可塑性原理,患者进行科学的上肢康复训练可以重塑神经对上肢的控制。传统的康复治疗方法是由康复医师根据患者的恢复情况一对一的进行专项康复训练,但国内康复医师不仅数量短缺,也无法保障康复过程的精度与强度。为了解决这一问题,现有技术中将机器人与医学相结合,研制出一种上肢康复机器人,不仅减轻了对康复医师的依赖,而且帮助患者更好的恢复了上肢的运动机能。
3、但是现有的上肢康复机器人面临着主动自由度少、运动不灵活、适用人体上肢尺寸范围小、人机耦合性差等问题,导致其适用人群范围和训练效果受到了限制。
技术实现思路
1、本发明实施例的目的在于提供一种七自由度外骨骼上肢康复机器人,旨在解决上述背景技术中存在的问题。
2、本发明实施例是这样实现的,一种七自由度外骨骼上肢康复机器人,包括:
3、上臂尺寸调节机构,用于调节长短固定上臂;
4、前臂尺寸调节机构,用于调节长短固定前臂;
5、手部尺寸调节机构,用于调节长短便于手掌抓握;
6、肩关节运动机构,与所述上臂尺寸调节机构相连,用于带动肩关节进行内收或外展、内旋或外旋、后伸或前屈运动;
7、肘关节运动机构,连接在上臂尺寸调节机构和前臂尺寸调节机构之间,用于带动肘关节进行屈或伸运动;
8、腕关节运动机构,连接在所述前臂尺寸调节机构和手部尺寸调节机构之间,用于带动腕关节进行内收或外展、内旋或外旋、屈曲或伸展运动。
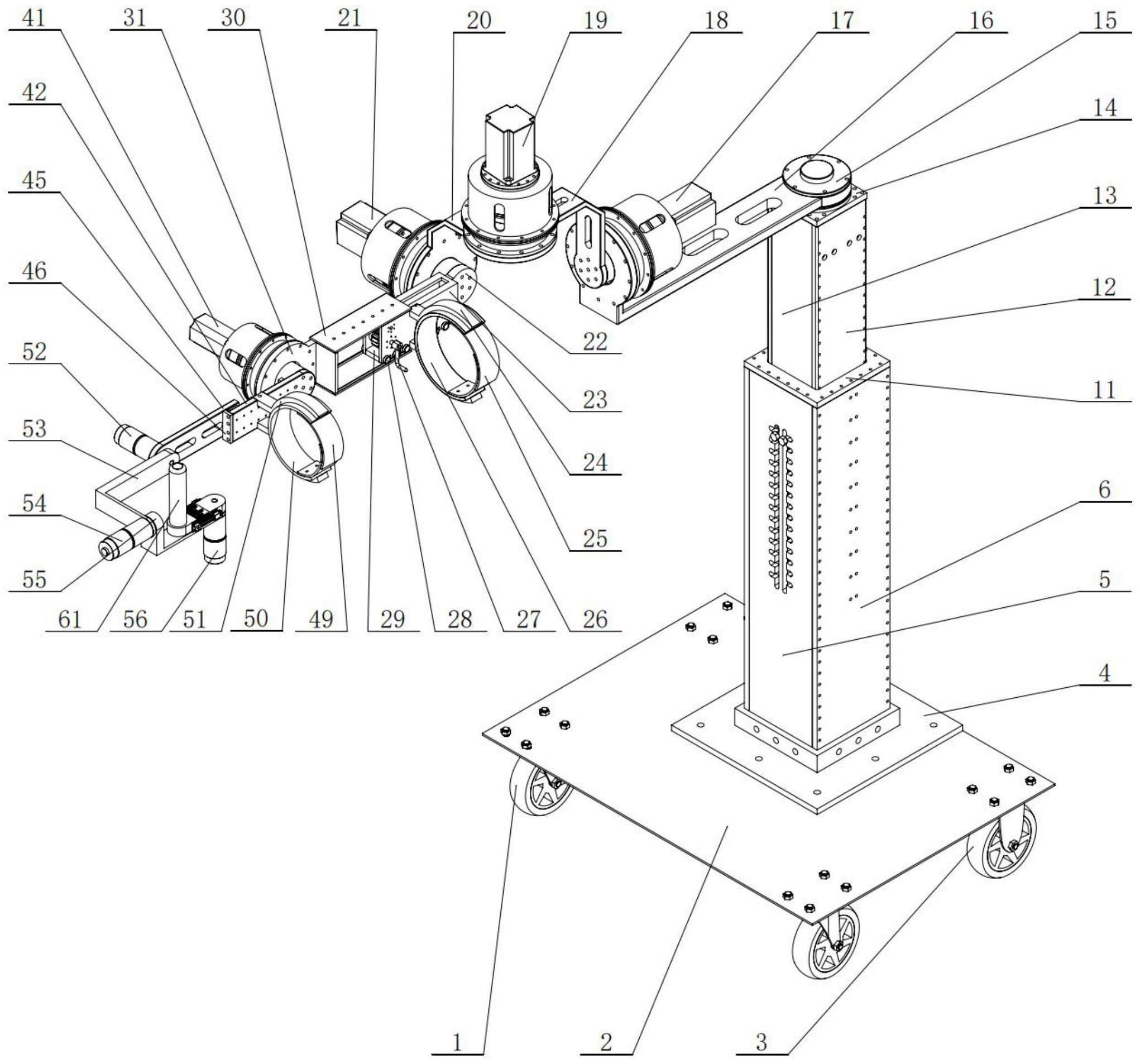
9、本发明实施例提供的一种七自由度外骨骼上肢康复机器人,针对现有技术中康复机器人主动自由度少、运动不灵活、适用人体上肢尺寸范围小、人机耦合性差的问题,设置有肩关节运动机构、肘关节运动机构、腕关节运动机构,可以实现七个自由度,主动自由度多,运动灵活,同时还设置有上臂尺寸调节机构、前臂尺寸调节机构、手部尺寸调节机构,适用人体上肢尺寸范围广、人机耦合性较好,避免出现由于患者个体尺寸差异而导致无法匹配上肢康复机器人的尺寸的问题。
技术特征:
1.一种七自由度外骨骼上肢康复机器人,其特征在于,包括:
2.根据权利要求1所述的七自由度外骨骼上肢康复机器人,其特征在于,所述上臂尺寸调节机构包括:
3.根据权利要求1所述的七自由度外骨骼上肢康复机器人,其特征在于,所述前臂尺寸调节机构包括:
4.根据权利要求1所述的七自由度外骨骼上肢康复机器人,其特征在于,所述手部尺寸调节机构包括:
5.根据权利要求1所述的七自由度外骨骼上肢康复机器人,其特征在于,所述肩关节运动机构包括:
6.根据权利要求1所述的七自由度外骨骼上肢康复机器人,其特征在于,所述肘关节运动机构包括:
7.根据权利要求1所述的七自由度外骨骼上肢康复机器人,其特征在于,所述腕关节运动机构包括:
8.根据权利要求1所述的七自由度外骨骼上肢康复机器人,其特征在于,所述机器人还包括升降旋转移动平台机构,与所述上臂尺寸调节机构相连,用于带动机器人进行升降、旋转和移动。
9.根据权利要求8所述的七自由度外骨骼上肢康复机器人,其特征在于,所述升降旋转移动平台机构包括:
技术总结
本发明适用于医疗康复机械技术领域,提供了一种七自由度外骨骼上肢康复机器人,包括:上臂尺寸调节机构;前臂尺寸调节机构;手部尺寸调节机构;肩关节运动机构,与所述上臂尺寸调节机构相连,用于带动肩关节进行内收或外展、内旋或外旋、后伸或前屈运动;肘关节运动机构,连接在上臂尺寸调节机构和前臂尺寸调节机构之间,用于带动肘关节进行屈或伸运动;腕关节运动机构,连接在所述前臂尺寸调节机构和手部尺寸调节机构之间,用于带动腕关节进行内收或外展、内旋或外旋、屈曲或伸展运动。本发明可以实现七个自由度,主动自由度多,运动灵活,适用人体上肢尺寸范围广、人机耦合性较好。
技术研发人员:李宪华,邱洵,王成军,凌六一,杜鹏飞,蔡钰
受保护的技术使用者:安徽理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!