一种锤击拍打机器人的制作方法
本发明属于按摩设备,具体涉及一种锤击拍打机器人。
背景技术:
1、随着社会压力的增大和工作节奏的加快,人们对于舒适和快速的按摩设备需求越来越大。拍打按摩能够有效地促进血液循环,缓解肌肉疲劳和疼痛,使人们在疲劳的工作或运动后得到舒适的放松。
2、现有的拍打按摩设备,大多是手动操作或者简单的电动设备,不能进行精确的控制,拍打力度和频率不易调节,或者运动过程中的稳定性较差,这些问题均限制了按摩效果的提升。同时,这些设备大多采用机械传动,结构复杂,易出现故障,使用寿命有限,维护成本较高。
3、此外,现有设备的驱动和控制方式较为简单,无法根据用户的不同需求进行个性化的调节,且无法实现自动化和智能化的操作,不利于提高按摩效果和使用者的体验。
技术实现思路
1、针对现有技术中存在的问题,本发明的目的在于提供一种锤击拍打机器人,它可以实现,拍打力度和频率的调节,满足不同用户的需求,提高按摩效果和使用者的体验。
2、为实现上述目的,本发明提供如下技术方案:
3、一种锤击拍打机器人,包括收纳仓,所述收纳仓包括底座,所述底座的顶端设置有电池仓,所述电池仓的顶端设置有支撑架,所述支撑架的顶端对称连接有转轴座和限位组件,所述转轴座和限位组件之间转动连接有联动机构,所述支撑架的内侧设置有驱动机构。
4、进一步的,所述支撑架包括顶板,所述限位组件位于顶板的上端面,所述限位组件包括连接板,所述连接板的顶端固定连接有三角板,所述三角板上转动连接有转轴,所述转轴的两端均设置有轴承座,所述联动机构包括拍打臂,所述拍打臂的一端侧面固定连接有联动轴,所述联动轴从转轴座中穿过,且联动轴的一端插入到第二连接孔内。
5、进一步的,所述拍打臂的另一端固定连接有按摩掌,所述按摩掌的下端面设置有按摩头,所述按摩头设置为下凸型。
6、进一步的,所述联动轴上固定连接有连接盘,且联动轴上套设有从动盘,所述从动盘和连接盘之间通过螺钉固定连接,所述从动盘的侧面通过螺钉连接有从动臂,所述顶板的上端面对称贯穿开设有第一通槽,所述连接盘、从动盘和从动臂均位于第一通槽内。
7、进一步的,所述驱动机构包括支撑座,所述支撑座的顶部设置有电机,所述电机的输出端设置有驱动盘,所述驱动盘的侧面转动连接有驱动轮,所述驱动轮,所述从动臂的侧面贯穿开设有第二通槽,所述驱动轮位于第二通槽内。
8、进一步的,所述连接板的上端面贯穿开设有第二连接孔,且连接板的一端固定连接有侧板,所述侧板的侧面贯穿开设有第二通孔,所述电机的一端外侧固定连接有连接座。
9、进一步的,所述顶板的上端面对称贯穿开设有第一连接孔,所述顶板的下端面设置有支柱,所述支柱位于第一连接孔的下方,且支柱的底部固定连接有底板。
10、进一步的,所述从动臂的侧面贯穿开设有第三连接孔,所述从动盘的侧面贯穿开设有螺纹槽。
11、进一步的,所述底座的顶部固定连接有主仓体,所述主仓体的侧面贯穿开设有第一通孔,所述联动轴从第一通孔中穿过,所述主仓体上转动连接有仓门,所述底座的底部设置有万向轮。
12、进一步的,所述转轴座的两端均固定连接有固定板。
13、与现有技术相比,本发明的有益效果是:
14、1.该锤击拍打机器人通过精确的驱动机制,实现了从动臂与驱动盘的同步摆动,进而实现拍打臂的稳定拍打。这种设计改善了传统按摩设备可能出现的拍打力度不稳定的问题,提供了更为稳定且连续的按摩效果。
15、2.该机器人利用电机驱动,相较于传统的手动按摩工具,可以提供更为持久且恒定的按摩力度,减少了使用者的疲劳度,提高了按摩的效率。
16、3.该机器人的联动轴设计提高了拍打过程的稳定性,通过转轴座和轴承座的配合,使得联动轴的运动更加平稳,避免了拍打过程中的剧烈摆动,提供了更为舒适的按摩体验。
17、4.通过电池供电,使得机器人使用更为便捷,无需考虑电源线的限制,提供了更大的使用范围。
18、5.通过底部设置的万向轮,使得机器人在使用过程中可以灵活移动,无需手动搬运,方便了用户的使用。
19、6.该机器人的设计在结构上紧凑,充分考虑了使用者的需求和使用场景,使得机器人可以在家庭、医疗、康复等领域得到广泛应用。
技术特征:
1.一种锤击拍打机器人,包括收纳仓(1),其特征在于:所述收纳仓(1)包括底座(13),所述底座(13)的顶端设置有电池仓(14),所述电池仓(14)的顶端设置有支撑架(2),所述支撑架(2)的顶端对称连接有转轴座(3)和限位组件(4),所述转轴座(3)和限位组件(4)之间转动连接有联动机构(6),所述支撑架(2)的内侧设置有驱动机构(5)。
2.根据权利要求1所述的一种锤击拍打机器人,其特征在于:所述支撑架(2)包括顶板(21),所述限位组件(4)位于顶板(21)的上端面,所述限位组件(4)包括连接板(41),所述连接板(41)的顶端固定连接有三角板(43),所述三角板(43)上转动连接有转轴(44),所述转轴(44)的两端均设置有轴承座(441),所述联动机构(6)包括拍打臂(61),所述拍打臂(61)的一端侧面固定连接有联动轴(64),所述联动轴(64)从转轴座(3)中穿过,且联动轴(64)的一端插入到第二连接孔(411)内。
3.根据权利要求2所述的一种锤击拍打机器人,其特征在于:所述拍打臂(61)的另一端固定连接有按摩掌(62),所述按摩掌(62)的下端面设置有按摩头(63),所述按摩头(63)设置为下凸型。
4.根据权利要求2所述的一种锤击拍打机器人,其特征在于:所述联动轴(64)上固定连接有连接盘(641),且联动轴(64)上套设有从动盘(65),所述从动盘(65)和连接盘(641)之间通过螺钉固定连接,所述从动盘(65)的侧面通过螺钉连接有从动臂(66),所述顶板(21)的上端面对称贯穿开设有第一通槽(212),所述连接盘(641)、从动盘(65)和从动臂(66)均位于第一通槽(212)内。
5.根据权利要求4所述的一种锤击拍打机器人,其特征在于:所述驱动机构(5)包括支撑座(51),所述支撑座(51)的顶部设置有电机(52),所述电机(52)的输出端设置有驱动盘(53),所述驱动盘(53)的侧面转动连接有驱动轮(531),所述驱动轮(531),所述从动臂(66)的侧面贯穿开设有第二通槽(661),所述驱动轮(531)位于第二通槽(661)内。
6.根据权利要求5所述的一种锤击拍打机器人,其特征在于:所述连接板(41)的上端面贯穿开设有第二连接孔(411),且连接板(41)的一端固定连接有侧板(42),所述侧板(42)的侧面贯穿开设有第二通孔(421),所述电机(52)的一端外侧固定连接有连接座(54)。
7.根据权利要求2所述的一种锤击拍打机器人,其特征在于:所述顶板(21)的上端面对称贯穿开设有第一连接孔(211),所述顶板(21)的下端面设置有支柱(22),所述支柱(22)位于第一连接孔(211)的下方,且支柱(22)的底部固定连接有底板(23)。
8.根据权利要求4所述的一种锤击拍打机器人,其特征在于:所述从动臂(66)的侧面贯穿开设有第三连接孔(662),所述从动盘(65)的侧面贯穿开设有螺纹槽(651)。
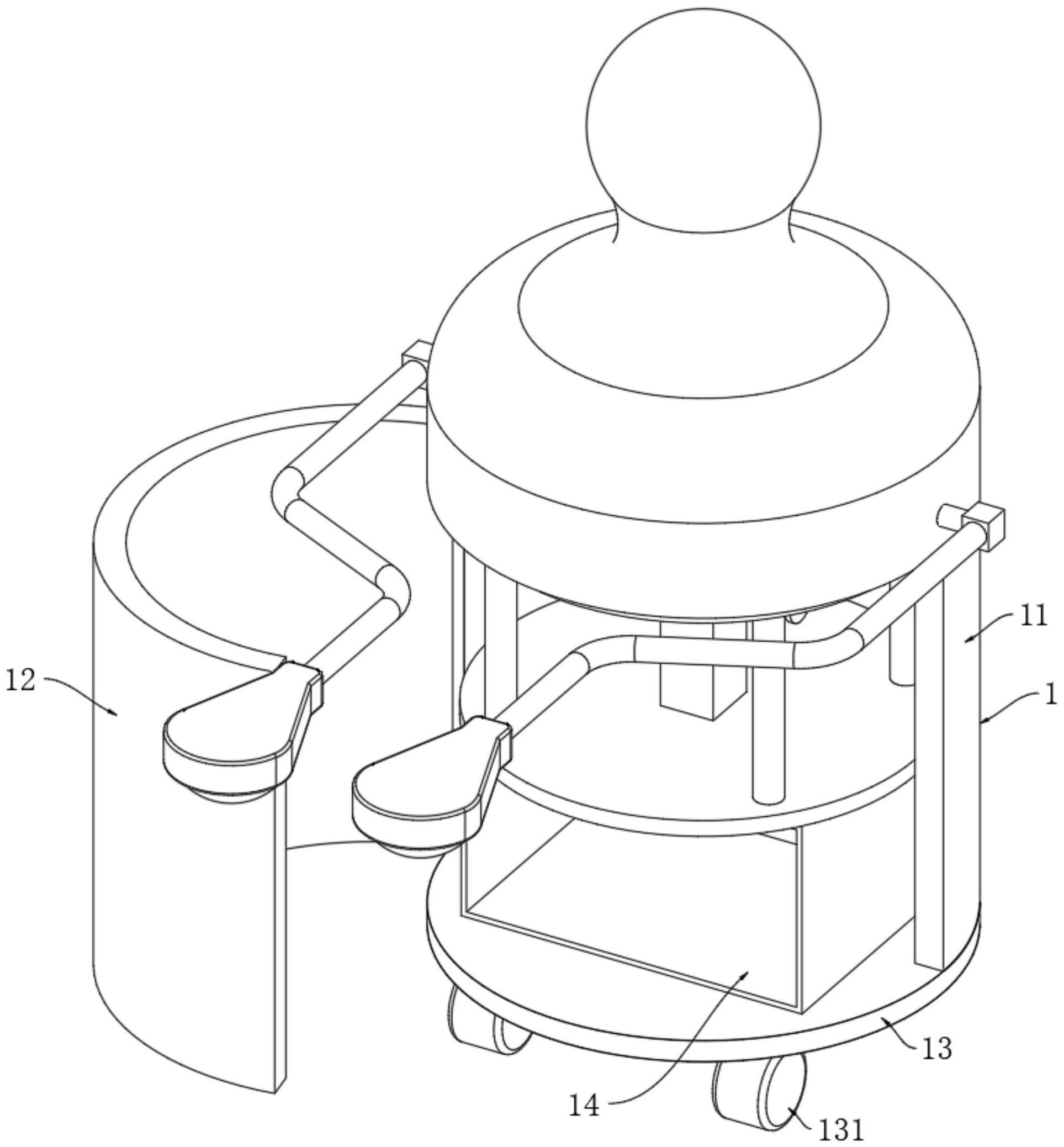
9.根据权利要求4所述的一种锤击拍打机器人,其特征在于:所述底座(13)的顶部固定连接有主仓体(11),所述主仓体(11)的侧面贯穿开设有第一通孔(111),所述联动轴(64)从第一通孔(111)中穿过,所述主仓体(11)上转动连接有仓门(12),所述底座(13)的底部设置有万向轮(131)。
10.根据权利要求1所述的一种锤击拍打机器人,其特征在于:所述转轴座(3)的两端均固定连接有固定板(31)。
技术总结
本发明属于按摩设备技术领域,具体涉及一种锤击拍打机器人,包括收纳仓,所述收纳仓包括底座,所述底座的顶端设置有电池仓,所述电池仓的顶端设置有支撑架,所述支撑架的顶端对称连接有转轴座和限位组件,转轴座和限位组件之间转动连接有联动机构,支撑架的内侧设置有驱动机构。该锤击拍打机器人通过精确的驱动机制,实现了从动臂与驱动盘的同步摆动,进而实现拍打臂的稳定拍打;这种设计改善了传统按摩设备可能出现的拍打力度不稳定的问题,提供了更为稳定且连续的按摩效果;该机器人的联动轴设计提高了拍打过程的稳定性,通过转轴座和轴承座的配合,使得联动轴的运动更加平稳,避免了拍打过程中的剧烈摆动,提供了更为舒适的按摩体验。
技术研发人员:王世峰
受保护的技术使用者:安徽一锤通物联科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!