一种手术机器人配套的特殊内窥镜及动力牵引系统的制作方法
本发明涉及智能医疗器械领域。具体地说,本发明内窥镜的长导管从口腔插入胃或支气管中,长导管的头部机构需要弯曲、改变方向,通常医生旋动固定在手柄上的带齿转盘、手动牵引。而本发明内窥镜适合电动机牵引、电动机受控制器智能控制。内窥镜导管需要有预留通道,一般称“钳道”,手术器械从钳道进入人体,本发明钳道的特征适合较大的手术器械通过,便于实施手术、智能操控。
背景技术:
1、现有内窥镜(以胃镜为例),医生手握胃镜手柄,将胃镜的长导管从口腔插入胃中;医生手动操作,拨动手柄上的带齿的转盘、通过牵引丝、使插入胃中的长导管头部机构弯曲、变换角度检查病变;在胃镜的长导管和手柄中,预留着供手术器械插入胃的通道,一般称“钳通道”即“钳道”,手术器械穿过钳道进入胃中,实施手术;目前,医生只能将手术器械从胃镜的手柄的“侧面钳道口”插入,手术器械必须“转一个弯”才能进入胃镜长导管中的钳道,通过钳道再进入人体,实施手术。
2、现有内窥镜用于机器人手术有如下严重缺陷:
3、1、手术器械只能从内窥镜手柄的“侧面的钳道口”进入钳道内、必须在钳道内转一个弯才能进入内窥镜长导管的预留的钳道、再进入人体;
4、2、手术器械通过“弯的钳道”进入人体阻力大、且不安全,只能让很小的手术器械通过现有“弯的钳道”;
5、3、内窥镜长导管头部构件随着内窥镜长导管进入人体后,需要弯曲、需要变换角度检查病变,无法实现智能牵引、只能由医生用手拨动内窥镜手柄上的带齿的转盘,手动操作。
6、为什么现有内窥镜用于机器人手术会有如此重大缺陷呢?为什么手术器械只能从内窥镜手柄的侧面钳道口插入,再转弯进入内窥镜长导管中的钳道呢?
7、因为受到了现有机构的阻挡:受到了内窥镜手柄上医生拨动的带齿转盘的阻挡,受到了手柄内部与转盘配套的机构的阻挡。从而造成已无法使手柄内预留直通道、直钳道口,更无法让牵引丝再通到右边手柄外、实施智能牵引,使内窥镜长导管头部的构件弯曲和改变方向。
8、社会、医生迫切需要插入人体的内窥镜导管头部构件的弯曲、改变角度,能通过智能牵引来实现,迫切需要让手术器械通过直钳道插入手柄、再沿直线通过手柄、进入内窥镜的长导管内的钳道,使较大的手术器械通过直钳道、更好地实施手术。但至今未见相关产品和专利问世。
技术实现思路
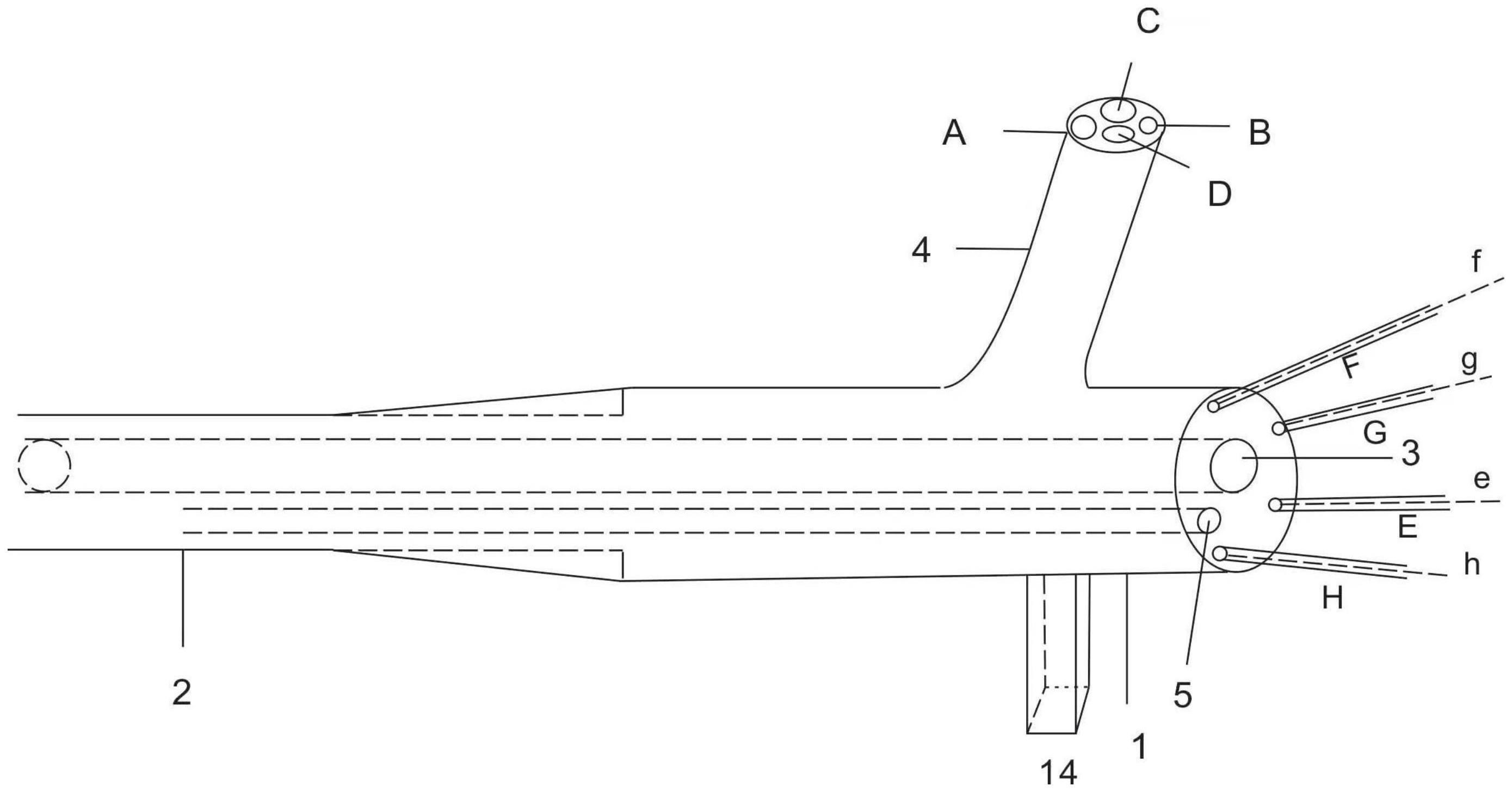
1、1、本发明正是为上述需要而发明的一种手术机器人配套的内窥镜和智能动力牵引系统,其特征是由手术机器人配套的内窥镜和智能动力牵引系统组成,所述手术机器人配套的内窥镜特征是:内窥镜的专供手术器械通过的钳道(3)从硬质空心手柄(1)的右端沿直线通到硬质空心手柄(1)的左端、再穿过与硬质空心手柄(1)相连的内窥镜长导管(2)。
2、2、本发明硬质空心手柄(1)上固定有空心手柄分枝(4),空心的手柄分枝(4)内有光纤通道(a)(b)、摄像头相关的电路及信号通道(c)、冲洗用的液体或气体通道(d),上述各通道进入手柄分枝(4)后再转弯向左进入硬质空心手柄(1),再向左穿过内镜长导管(2),上述各通道与空心手柄分枝、硬质空心手柄、内窥镜长导管固定为一个整体,上述各通道在空心手柄分枝(4)的右上方与对应设备相连。
3、3、本发明智能动力牵引系统特征是:四根牵引丝(e)(f)(g)(h)穿过对应的四根细长导管(e)(f)(g)(h),四根细长导管从硬质空心手柄(1)的右端柄的外边穿入硬质空心手柄(1)内、再向左穿过硬质空心手柄(1)、再穿入内窥镜长导管(2);
4、第一牵引丝(e)、第二牵引丝(f)由第一电动机牵引,第三牵引丝(g)、第四牵引丝(h)由第二电动机牵引;
5、四根穿有牵引丝的细长导管(e)(f)(g)(h)穿过内窥长导管(2)、并固定、再穿过硬质空心手柄(1)、再从硬质空心手柄(1)的右端穿出、穿出后再分别穿过固定在支架(6)上的四段依托管(10)(11)(12)(13);
6、支架(6)固定在动力牵引系统基板(7)上,支架(6)上有四个小孔,四根牵引丝(e)(f)(g)(h)恰能分别穿过支架(6)上的小孔,四根细长导管(e)(f)(g)(h)因大于支架上的小孔所以不能穿过支架上的小孔、但恰能穿入依托管;
7、第一牵引丝(e)的右端和第二牵引丝(f)的右端与第一转盘(8)固定,第一牵引丝(e)在第一转盘(8)上绕1一2圈,第二牵引丝(f)在第一转盘(8)上反向绕1一2圈,第一转盘由第一电动机带动;
8、第三牵引丝(g)的右端和第四牵引丝(h)的右端与第二转盘(9)固定,第三牵引丝(g)在第二转盘(9)上绕1一2圈,第四牵引丝反向在第二转盘(9)上绕1一2圈,第二转盘(9)由第二电动机带动;所述电动机分别由控制器智能控制;
9、四根牵引丝的另一端分别与内窥镜需要弯曲的头部构件固定,所述头部构件与内窥镜长导管(2)相连、隨长导管插入人体;
10、所述内窥镜需要弯曲的头部构件和控制技术本人已另申请专利;
11、所述四根穿有牵引丝的细长导管、内窥镜长导管都不易压缩、拉伸,但能弯曲。
12、4、本发明硬质空心手柄(1)和内窥镜长导管(2)中还预留有小通道(5)、小通道(5)在硬质空心手柄中呈直线状。
13、本发明通过固定在硬质空心手柄(1)上的支柱(14)插入动力牵引系统基板上的对应孔中并固定。
14、本发明智能动力牵引系统动作原理:
15、第一电动机带动第一转盘(8)顺时针转动,第一牵引丝(e)拉紧、第二牵引丝(f)放松,内窥镜头部机构向上弯曲;若逆时针转动则(f)拉紧、(e)放松,内窥镜头部机构向下弯曲;
16、内窥头部可弯曲的机构由多节圆管构成,分別在不同牵引丝作用下向不同方向弯曲。
17、本发明克服了原有内窥镜的严重缺陷:手术器械只能从侧面进入手柄、再转弯进入内窥镜长导管,只能让很小的手术器械通过弯的钳道,且无法实现智能牵引、只能由医生拨动带齿的转盘手动操作;
18、本发明留有钳道(3)和小通道(5)两条手术器械通道,两种手术器械可同时经两条通道进入人体,配合完成手术。
19、本发明的核心技术是:
20、与手术机器人配套的内窥镜的专供手术器械通过的钳道(3)从硬质空心手柄(1)的右端沿直线通到硬质空心手柄(1)的左端、再穿过与硬质空心手柄(1)相连的内窥镜长导管(2),从而能使较大的手术器械可顺利通过钳道,并且因牵引丝从硬质空心手柄右端穿出、可由电动机实施智能牵引,使内窥镜需要弯曲的头部构件弯曲和改变方问;本发明除了有钳道(3)外还预留小通道(5),两种手术器械可同时经两条通道进入人体,配合完成手术。
技术特征:
1.一种手术机器人配套的内窥镜和智能动力牵引系统,其特征是由手术机器人配套的内窥镜和智能动力牵引系统组成,所述手术机器人配套的内窥镜特征是:内窥镜的专供手术器械通过的钳道(3)从硬质空心手柄(1)的右端沿直线通到硬质空心手柄(1)的左端、再穿过与硬质空心手柄(1)相连的内窥镜长导管(2)。
2.按权利要求1所述:内窥镜的专供手术器械通过的钳道(3)从硬质空心手柄(1)的右端沿直线通到硬质空心手柄(1)的左端,所述硬质空心手柄(1)上固定有空心手柄分枝(4),空心的手柄分枝(4)内有光纤通道(a)(b)、摄像头相关的电路及信号通道(c)、冲洗用的液体或气体通道(d),上述各通道进入手柄分枝(4)后再转弯向左进入硬质空心手柄(1),再向左穿过内镜长导管(2),上述各通道与空心手柄分枝、硬质空心手柄、内窥镜长导管固定为一个整体,上述各通道在空心手柄分枝(4)的右上方与对应设备相连。
3.按权利要求1所述一种手术机器人配套的内窥镜和智能动力牵引系统,其特征是由手术机器人配套的内窥镜和智能动力牵引系统组成,所述智能动力牵引系统特征是:
4.按权利要求1所述手术机器人配套的内窥镜特征是:内窥镜的专供手术器械通过的钳道(3)从硬质空心手柄(1)的右端沿直线通到硬质空心手柄(1)的左端,所述硬质空心手柄(1)中留有小通道(5),小通道(5)通过内窥镜长导管(2),小通道(5)在硬质空心手柄(1)中呈直线状。
技术总结
提供一种手术机器人配套的内窥镜和智能动力牵引系统,特征是:内窥镜的专供手术器械通过的钳道(3)从硬质空心手柄(1)的右端沿直线通到硬质空心手柄(1)的左端、再穿过与硬质空心手柄(1)相连的长导管(2);四根穿有牵引丝的细长导管穿过内窥镜的长导管(2)、并与(2)固定、再穿过硬质空心手柄(1)、再从硬质空心手柄(1)的右端穿出,电动机对细长导管中的牵引丝实施牵引,电动机由控制器智能控制。
技术研发人员:孙宝龙
受保护的技术使用者:上海遥罡智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!