一种基于视觉扫描的呼吸系统手术息肉摘除器的制作方法
本发明涉及医疗器械,尤其涉及一种基于视觉扫描的呼吸系统手术息肉摘除器。
背景技术:
1、声带息肉容易发于声带边缘的前中1/3,主要表现为声嘶,过大者堵塞声门导致失声,甚至引起吸气性喉鸣和呼吸困难。手术切除是治疗声带息肉的最佳方法,常见手术方法有:电子喉镜下切除术、支撑喉镜下切除术、间接喉镜下切除术、显微镜下“翻瓣”技术等。由于电子喉镜具有可弯曲性,能为医生提供清晰、放大图像。相比传统支撑喉镜下声带息肉摘除手术,电子喉镜下手术的“死角”小,同时具有无需住院全身麻醉、术中痛苦小、手术时间短、医疗费用低等特点,使其更易于被病人接受;手术前后对比图像资料也提高了医患双方的安全感。因此,该项术式在国内得到越来越多的病人和医生的青睐。目前,局麻下电子喉镜下声带息肉切除术成为治疗声带息肉的重要术式之一。
2、根据上述,目前,国内几乎均采用电子喉镜下活检钳摘除声带息肉,但是传统的电子喉镜下活检钳摘除方式存在诸多缺点和不足,具体如下;
3、1、传统依靠单个电子喉镜进行观察,不仅观察范围小,影响操作性,此外也无法实现高智能扫描效果,影响息肉摘除效果。
4、1、传统的活检钳需要医护人员完全手动操作,增加手术难度,无法与视觉扫描进行有效配合实现智能化的息肉摘除。
5、鉴于上述缺陷,迫切需要设计出一种针对实验鼠的多功能固定组合式实验平台。
技术实现思路
1、本发明所要解决的技术问题在于:提供一种基于视觉扫描的呼吸系统手术息肉摘除器,来解决背景技术提出的问题。
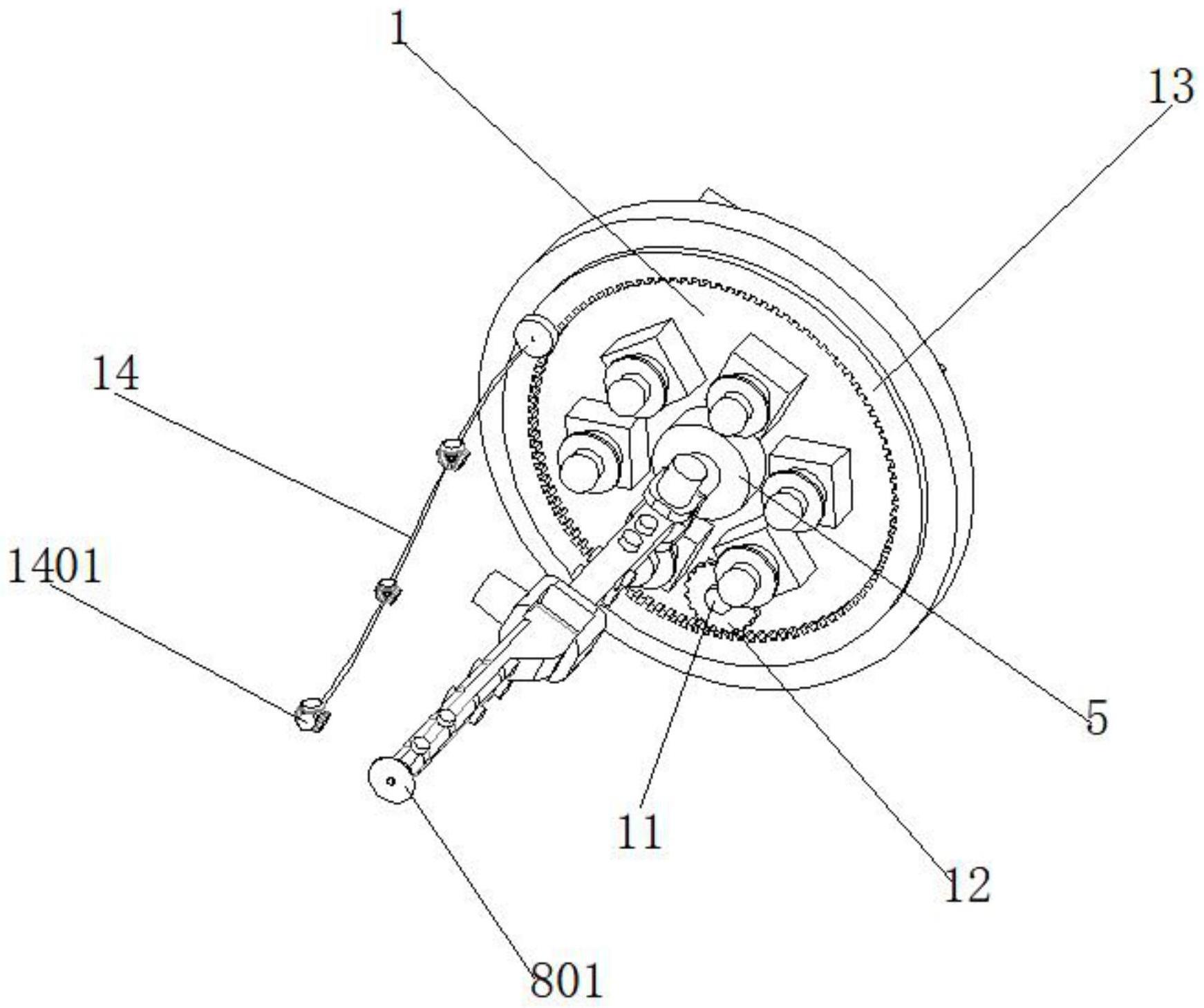
2、为解决上述技术问题,本发明的技术方案是:一种基于视觉扫描的呼吸系统手术息肉摘除器,包括基础板、微电脑处理器、图像处理器、电机驱动器、第一步进电机、微型机械臂、第一视觉传感器、高速微型电机、角度调节器、第二视觉传感器、第二步进电机、主动齿轮、齿轮环、记忆调节丝、第三视觉传感器,所述微电脑处理器固设于基础板顶部一侧,所述微电脑处理器与基础板采用螺栓连接,所述图像处理器固设于基础板顶部一侧,所述图像处理器与基础板采用螺栓连接,且所述图像处理器与微电脑处理器采用电性连接,所述电机驱动器固设于基础板顶部一侧,所述电机驱动器与基础板采用螺栓连接,且所述电机驱动器与微电脑处理器采用电性连接,所述第一步进电机固设于基础板中端,所述第一步进电机与基础板采用螺栓连接,且所述第一步进电机与电机驱动器采用电性连接,所述微型机械臂固设于第一步进电机底部,所述微型机械臂与第一步进电机采用联轴器连接,且所述微型机械臂与微电脑处理器采用电性连接,所述第一视觉传感器数量为若干件,所述第一视觉传感器从上至下分布于微型机械臂内部四周,所述第一视觉传感器与微型机械臂采用热熔连接,且所述第一视觉传感器与图像处理器采用电性连接,所述高速微型电机固设于微型机械臂内部底端,所述高速微型电机与微型机械臂采用热熔连接,且所述高速微型电机与电机驱动器采用电性连接,所述角度调节器数量为若干件,所述角度调节器固设于基础板底部一圈,所述角度调节器与基础板采用螺栓连接,且所述角度调节器与微电脑处理器采用电性连接,所述第二视觉传感器固设于角度调节器底部,所述第二视觉传感器与角度调节器采用螺栓连接,且所述第二视觉传感器与图像处理器采用电性连接,所述第二步进电机固设于基础板内部一侧,所述第二步进电机与基础板采用热熔连接,且所述第二步进电机与电机驱动器采用电性连接,所述主动齿轮固设于第二步进电机底部,所述主动齿轮与第二步进电机采用紧配连接,所述齿轮环嵌入基础板内部底端外侧,所述齿轮环与基础板采用转动连接,且所述齿轮环与主动齿轮采用轮齿啮合连接,所述记忆调节丝固设于齿轮环底部一侧,所述记忆调节丝与齿轮环采用热熔连接,所述第三视觉传感器数量为若干件,所述第三视觉传感器分三组从上至下环绕于记忆调节丝外壁一圈,所述第三视觉传感器与记忆调节丝采用热熔连接,且所述第三视觉传感器与图像处理器采用电性连接。
3、进一步,所述基础板顶部左右两侧还固设有安装架,所述安装架与基础板采用螺栓连接。
4、进一步,所述基础板顶部一侧还固设有储存器,所述存储器与基础板采用螺栓连接,且所述储存器分别与微电脑处理器和图像处理器采用电性连接。
5、进一步,所述基础板顶部一侧还固设有电性连接器,所述电性连接器与基础板采用螺栓连接,且所述电性连接器分别与微电脑处理器、图像处理器、电机驱动器、第一步进电机、微型机械臂、第一视觉传感器、高速微型电机、角度调节器、第二视觉传感器、第二步进电机、第三视觉传感器和储存器采用电性连接。
6、进一步,所述高速微型电机底部还固设有手术刀片,所述手术刀片与高速微型电机采用紧配连接。
7、进一步,所述记忆调节丝底部还固设有照明灯珠,所述照明灯珠与记忆调节丝采用热熔连接,且所述照明灯珠分别与微电脑处理器和电性连接器采用电性连接。
8、与现有技术相比,该一种基于视觉扫描的呼吸系统手术息肉摘除器,具备如下优点;
9、1、首先本发明通过若干组不同位置和角度的视觉传感器的相互配合,从而能大范围、多角度对手术区域进行视觉扫描,增强了手术视野,避免了手术盲区。
10、2、其次借助微型机械臂,进而不仅能实现自动化的手术操作,提高手术效率,此外通过与视觉传感器的配合,亦可增强手术过程中的安全性。
11、3、最后本发明采用高度集成设计,不仅能最大程度满足手术环境和空间需要,此外亦可配合现有手术设备和器械的应用,最终达到满足临床的推广和使用目的。
技术特征:
1.一种基于视觉扫描的呼吸系统手术息肉摘除器,其特征在于包括基础板、微电脑处理器、图像处理器、电机驱动器、第一步进电机、微型机械臂、第一视觉传感器、高速微型电机、角度调节器、第二视觉传感器、第二步进电机、主动齿轮、齿轮环、记忆调节丝、第三视觉传感器;
2.如权利要求1所述的一种基于视觉扫描的呼吸系统手术息肉摘除器,其特征在于所述基础板顶部左右两侧还固设有安装架,所述安装架与基础板采用螺栓连接。
3.如权利要求1所述的一种基于视觉扫描的呼吸系统手术息肉摘除器,其特征在于所述基础板顶部一侧还固设有储存器,所述存储器与基础板采用螺栓连接,且所述储存器分别与微电脑处理器和图像处理器采用电性连接。
4.如权利要求3所述的一种基于视觉扫描的呼吸系统手术息肉摘除器,其特征在于所述基础板顶部一侧还固设有电性连接器,所述电性连接器与基础板采用螺栓连接,且所述电性连接器分别与微电脑处理器、图像处理器、电机驱动器、第一步进电机、微型机械臂、第一视觉传感器、高速微型电机、角度调节器、第二视觉传感器、第二步进电机、第三视觉传感器和储存器采用电性连接。
5.如权利要求1所述的一种基于视觉扫描的呼吸系统手术息肉摘除器,其特征在于所述高速微型电机底部还固设有手术刀片,所述手术刀片与高速微型电机采用紧配连接。
6.如权利要求4所述的一种基于视觉扫描的呼吸系统手术息肉摘除器,其特征在于所述记忆调节丝底部还固设有照明灯珠,所述照明灯珠与记忆调节丝采用热熔连接,且所述照明灯珠分别与微电脑处理器和电性连接器采用电性连接。
技术总结
本发明公开了一种基于视觉扫描的呼吸系统手术息肉摘除器,包括基础板、微电脑处理器、图像处理器、电机驱动器、第一步进电机、微型机械臂、第一视觉传感器、高速微型电机、角度调节器、第二视觉传感器、第二步进电机、主动齿轮、齿轮环、记忆调节丝、第三视觉传感器,首先通过若干组不同位置和角度视觉传感器的配合,能大范围、多角度对手术区域进行视觉扫描,增强手术视野,避免手术盲区,其次借助微型机械臂,不仅能实现自动化的手术操作,提高手术效率,此外通过与视觉传感器的配合,增强手术过程中的安全性,最后采用高度集成设计,不仅最大程度满足手术环境和空间需要,此外配合现有手术设备和器械的应用,最终达到满足临床的推广和使用目的。
技术研发人员:王凯,张雅婷,马玥
受保护的技术使用者:天津市胸科医院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!