导电手术器械及手术机器人的制作方法
本发明涉及手术机器人,尤其涉及一种导电手术器械及手术机器人。
背景技术:
1、手术机器人在医学领域内得到广泛应用。手术机器人包括患者手术端,患者手术端的台车上设置有若干个手术器械。手术器械用于对患者进行手术操作。
2、导电手术器械在手术中用于实现切除、止血等功能。导电手术器械通常包括末端执行器和器械盒。末端执行器包括腕部机构和执行件,执行件通过转轴与腕部机构转动连接,来自器械盒的导线穿过腕部机构后连接于执行件,用于向执行件传输电能。执行件在转动的过程中,导线会随执行件转动,导致导线卷绕在转轴上的长度变化,从而拉扯导线,提高了导线损坏漏电的可能性,降低了手术的安全性,易对患者造成二次伤害,又影响了导电手术器械的耐用性,缩短导电手术器械的使用寿命。
3、基于此,亟需一种导电手术器械及手术机器人用来解决如上提到的问题。
技术实现思路
1、本发明的目的在于提供一种导电手术器械及手术机器人,在执行件转动时,导线不随执行件转动,避免拉扯导线,避免导线损坏漏电,提高手术的安全性,又利于延长导电手术器械的使用寿命。
2、为达此目的,本发明采用以下技术方案:
3、导电手术器械,包括:
4、执行件;
5、腕部机构,包括第一转轴,所述执行件转动连接于所述第一转轴;
6、导电件,连接于所述第一转轴并与所述执行件导电接触,所述执行件能够相对所述导电件转动;
7、导线,导电连接于所述导电件。
8、作为导电手术器械的可选技术方案,所述执行件包括导电环、执行部和绝缘保护件,所述绝缘保护件上开设有第一孔和第二孔,所述第一孔与所述第二孔沿所述第一转轴的轴向同轴连通,所述导电环置于所述第一孔内并活动套设在所述第一转轴上,所述执行部导电连接于所述导电环的侧壁,至少部分所述执行部沿所述第一转轴的径向伸出所述绝缘保护件,所述导电件的一端伸入所述第二孔并与所述导电环导电接触。
9、作为导电手术器械的可选技术方案,所述导电手术器械还包括固定件,所述固定件连接于所述第一转轴,所述固定件位于所述导电件远离所述导电环的一侧,所述固定件朝向所述执行件的一端开设有凹槽,所述导电件远离所述导电环的一端置于所述凹槽内。
10、作为导电手术器械的可选技术方案,所述固定件与所述第一转轴固定连接,所述固定件朝向所述执行件的端面与所述绝缘保护件的端面贴合,所述固定件的侧壁上开设有开口,所述开口与所述凹槽连通,所述导线穿设于所述开口。
11、作为导电手术器械的可选技术方案,所述凹槽的槽侧壁上沿周向开设有容置环槽,所述容置环槽贯通所述固定件朝向所述绝缘保护件的端面,至少部分所述绝缘保护件置于所述容置环槽内。
12、作为导电手术器械的可选技术方案,所述固定件与所述绝缘保护件沿所述第一转轴的轴向间隔设置,所述导线置于所述固定件与所述绝缘保护件之间。
13、作为导电手术器械的可选技术方案,所述执行件朝向所述导电件的一侧开设有接触槽,至少部分所述导电件置于所述接触槽内,所述导电件的端面与所述接触槽的槽底面贴合,所述导电件的侧壁与所述接触槽的槽侧壁贴合;
14、和/或,所述腕部机构还包括第一连接座,所述第一连接座上设置有两个末端连接耳,所述第一转轴的两端分别与两个所述末端连接耳连接,所述导电件设置在所述执行件与所述末端连接耳之间,所述导电件与所述末端连接耳之间设置有弹性件,所述弹性件能够使所述导电件与所述执行件抵接。
15、作为导电手术器械的可选技术方案,所述第一转轴包括轴体和绝缘保护套,所述绝缘保护套套设于所述轴体,所述执行件与所述导电件均连接于所述绝缘保护套;
16、和/或,所述导电手术器械还包括导电接触件,所述导电接触件置于所述导电件与所述执行件之间,且所述导电接触件的一端与所述导电件导电连接且另一端与所述执行件导电连接,所述导电接触件能够改变自身沿第一转轴轴向的长度。
17、作为导电手术器械的可选技术方案,所述腕部机构还包括第一连接座、第二连接座、第二转轴和第三转轴,所述第一转轴连接于所述第一连接座,所述第二转轴置于所述第一连接座上且与所述第一转轴垂直设置,所述第二转轴上同轴套设有第一滑轮,所述第一连接座上设有与所述第二转轴同轴设置的第一弧形面,所述第一弧形面上设有第一齿结构,所述第三转轴置于所述第二连接座上且与所述第二转轴平行设置,所述第三转轴上同轴套设有第二滑轮,所述第二连接座上设有与所述第三转轴同轴设置的第二弧形面,所述第二弧形面上设有第二齿结构,所述第一齿结构与所述第二齿结构啮合,所述第一齿结构与所述第二齿结构分度圆半径之比和所述第一滑轮与所述第二滑轮的半径之比相同;
18、所述导电手术器械还包括俯仰驱动丝,所述俯仰驱动丝用于操纵所述第一连接座转动;
19、所述导线呈s型绕设于正对设置的所述第一滑轮与所述第二滑轮上。
20、手术机器人,包括如上所述的导电手术器械。
21、本发明的有益效果:
22、本发明提供的导电手术器械,其包括执行件、腕部机构、导电件和导线,由于导线与导电件导电连接,导电件与执行件之间能够相对活动,当执行件绕腕部机构转动时,导线与导电件不会随执行件转动,避免了对于导线的拉扯,降低了导线损坏漏电的可能性,提高了手术的安全性,降低了对于患者造成二次伤害的可能性,又提高了导电手术器械的耐用性,利于延长导电手术器械的使用寿命,提高了导电手术器械在使用时的可靠性,同时也降低了维护成本,此外也缩短了导线的长度,降低了材料成本。
23、本发明提供的手术机器人,其包括上述导电手术器械,当执行件绕腕部机构转动时,避免了对于导线的拉扯,降低了损坏漏电的可能性,提高了手术的安全性,降低了对于患者造成二次伤害的可能性,又提高了导电手术器械的耐用性,利于延长导电手术器械的使用寿命,提高了导电手术器械在使用时的可靠性,同时也降低了维护成本,此外也降低了材料成本。
技术特征:
1.导电手术器械,其特征在于,包括:
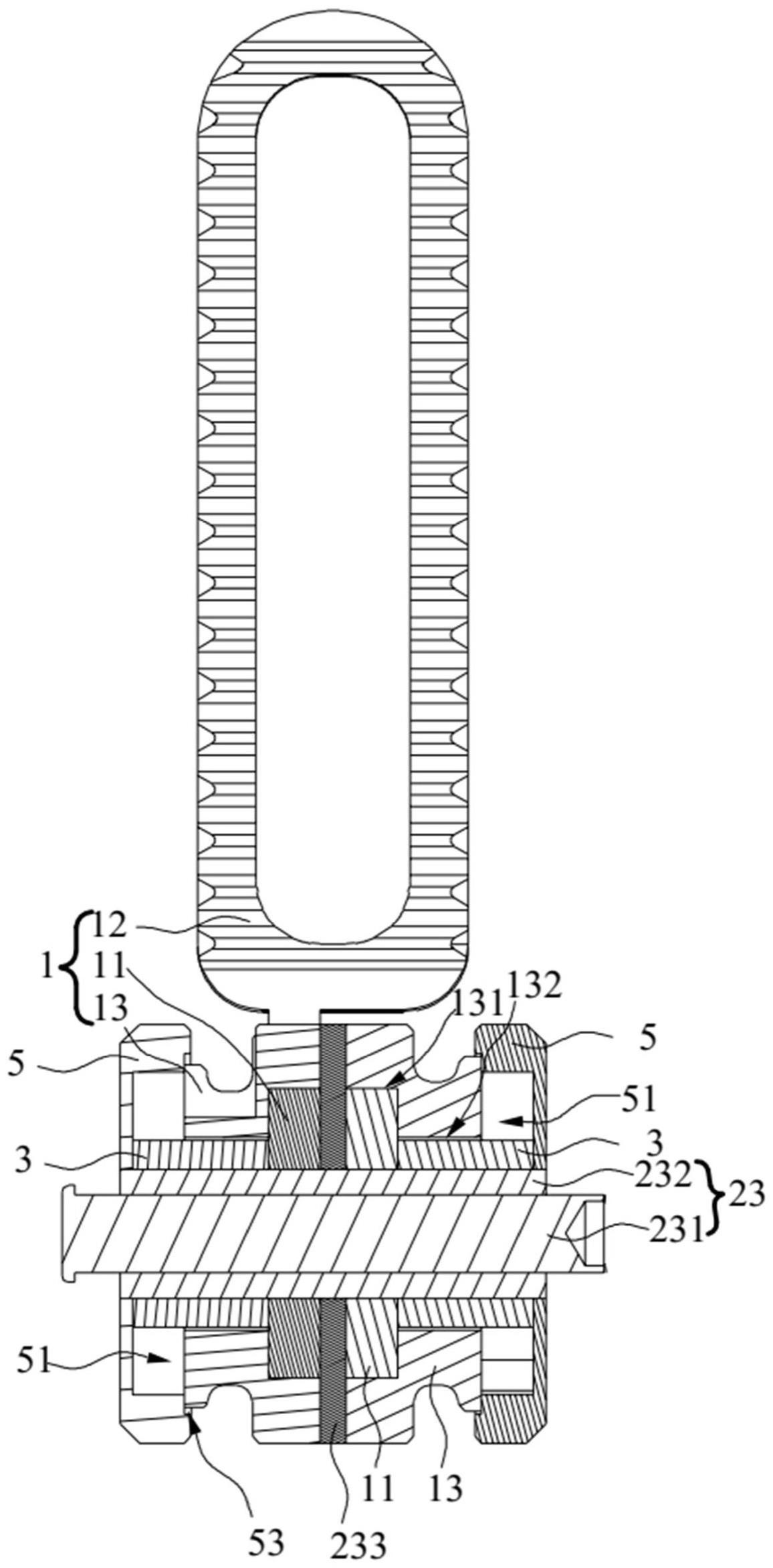
2.根据权利要求1所述的导电手术器械,其特征在于,所述执行件(1)包括导电环(11)、执行部(12)和绝缘保护件(13),所述绝缘保护件(13)上开设有第一孔(131)和第二孔(132),所述第一孔(131)与所述第二孔(132)沿所述第一转轴(23)的轴向同轴连通,所述导电环(11)置于所述第一孔(131)内并活动套设在所述第一转轴(23)上,所述执行部(12)导电连接于所述导电环(11)的侧壁,至少部分所述执行部(12)沿所述第一转轴(23)的径向伸出所述绝缘保护件(13),所述导电件(3)的一端伸入所述第二孔(132)并与所述导电环(11)导电接触。
3.根据权利要求2所述的导电手术器械,其特征在于,所述导电手术器械还包括固定件(5),所述固定件(5)连接于所述第一转轴(23),所述固定件(5)位于所述导电件(3)远离所述导电环(11)的一侧,所述固定件(5)朝向所述执行件(1)的一端开设有凹槽(51),所述导电件(3)远离所述导电环(11)的一端置于所述凹槽(51)内。
4.根据权利要求3所述的导电手术器械,其特征在于,所述固定件(5)与所述第一转轴(23)固定连接,所述固定件(5)朝向所述执行件(1)的端面与所述绝缘保护件(13)的端面贴合,所述固定件(5)的侧壁上开设有开口(52),所述开口(52)与所述凹槽(51)连通,所述导线(4)穿设于所述开口(52)。
5.根据权利要求4所述的导电手术器械,所述凹槽(51)的槽侧壁上沿周向开设有容置环槽(53),所述容置环槽(53)贯通所述固定件(5)朝向所述绝缘保护件(13)的端面,至少部分所述绝缘保护件(13)置于所述容置环槽(53)内。
6.根据权利要求3所述的导电手术器械,其特征在于,所述固定件(5)与所述绝缘保护件(13)沿所述第一转轴(23)的轴向间隔设置,所述导线(4)置于所述固定件(5)与所述绝缘保护件(13)之间。
7.根据权利要求1-6任一项所述的导电手术器械,其特征在于,所述执行件(1)朝向所述导电件(3)的一侧开设有接触槽,至少部分所述导电件(3)置于所述接触槽内,所述导电件(3)的端面与所述接触槽的槽底面贴合,所述导电件(3)的侧壁与所述接触槽的槽侧壁贴合;和/或,
8.根据权利要求1-6任一项所述的导电手术器械,其特征在于,所述第一转轴(23)包括轴体(231)和绝缘保护套(232),所述绝缘保护套(232)套设于所述轴体(231),所述执行件(1)与所述导电件(3)均连接于所述绝缘保护套(232);和/或,
9.根据权利要求1-6任一项所述的导电手术器械,其特征在于,所述腕部机构(2)还包括第一连接座(21)、第二连接座(22)、第二转轴(24)和第三转轴(25),所述第一转轴(23)连接于所述第一连接座(21),所述第二转轴(24)置于所述第一连接座(21)上且与所述第一转轴(23)垂直设置,所述第二转轴(24)上同轴套设有第一滑轮(241),所述第一连接座(21)上设有与所述第二转轴(24)同轴设置的第一弧形面,所述第一弧形面上设有第一齿结构(211),所述第三转轴(25)置于所述第二连接座(22)上且与所述第二转轴(24)平行设置,所述第三转轴(25)上同轴套设有第二滑轮(251),所述第二连接座(22)上设有与所述第三转轴(25)同轴设置的第二弧形面,所述第二弧形面上设有第二齿结构(221),所述第一齿结构(211)与所述第二齿结构(221)啮合,所述第一齿结构(211)与所述第二齿结构(221)分度圆半径之比和所述第一滑轮(241)与所述第二滑轮(251)的半径之比相同;
10.手术机器人,其特征在于,包括如权利要求1-9任一项所述的导电手术器械。
技术总结
本发明涉及手术机器人技术领域,公开了一种导电手术器械及手术机器人。导电手术器械包括执行件、腕部机构、导电件和导线。腕部机构包括第一转轴,执行件转动连接于第一转轴;导电件连接于第一转轴并与执行件导电接触,执行件能够相对导电件转动;导线导电连接于导电件。本发明提供的导电手术器械在执行件绕腕部机构转动时,避免对于导线的拉扯,降低损坏漏电的可能性,提高手术的安全性,于延长导电手术器械的使用寿命,也降低维护成本和材料成本。
技术研发人员:李建民,杨英侃,王炳强,王树新
受保护的技术使用者:山东威高手术机器人有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!