一种基于肢体协调运动的下肢康复路径规划及优化方法
本发明涉及下肢康复机器人领域,特别涉及一种下肢康复机器人的康复路径规划及优化方法。
背景技术:
1、脑卒中是造成身体运动机能障碍的主要杀手,也是目前致残率最高的疾病之一,且每年持续增长、并呈年轻化趋势,严重地危害患者身体健康。脑卒中会造成患者下肢运动功能障碍,且恢复过程缓慢,严重影响患者的日常生活和行动能力。为提高脑卒中患者生活质量,帮助患者进行有效的康复训练己经成为社会和医疗界的重要课题。在下肢康复机器人辅助脑卒中患者实现康复治疗过程中,如何合理的规划康复外骨骼机器人运动路径和优化路径以提高患者康复体验都尤为重要。
2、现阶段下肢康复路径规划的动作类人度不够,且未充分考虑用户体验,在康复过程中存在降低患者积极性的可能。本发明基于受试者完成双下肢协同康复动作的人体运动特征输出拟合规范化输出函数,并引入舒适度指标和复杂度指标作为综合康复指标进行约束,通过黄金分割算法得到优化后的规范化输出函数,从而实现与实际人体运动间有高一致性且符合人体工学的下肢康复路径规划及优化。
技术实现思路
1、要解决的技术问题:
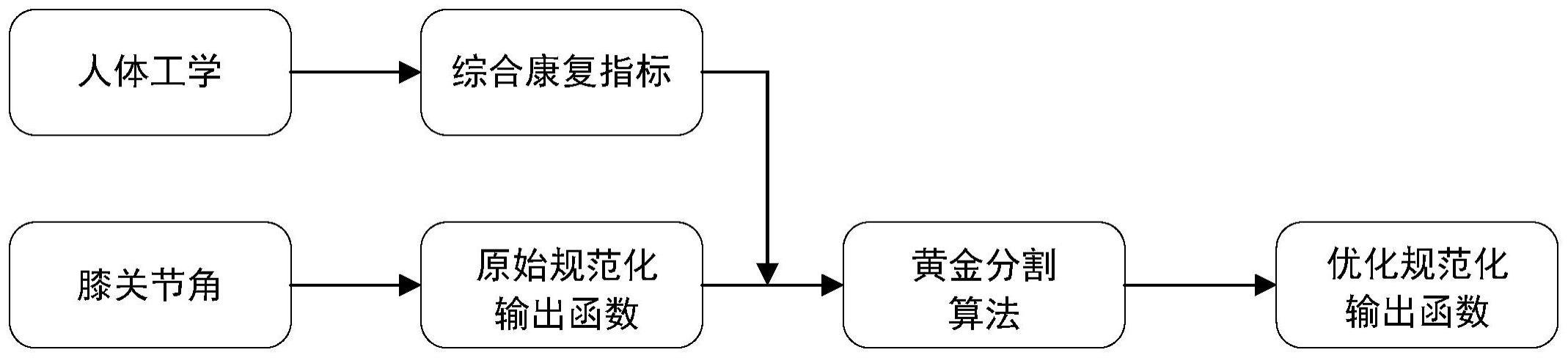
2、为了实现高类人度的下肢康复路径规划及基于人体工学优化,本发明公开了一种基于肢体协调运动的下肢康复路径规划及优化方法,根据受试者完成双下肢协同康复动作时的运动特征输出拟合原始规范化输出函数,基于综合康复指标约束通过换金分割算法进行轨迹优化,优化后的规范化输出函数实现了与实际人体运动间的高一致性,且符合人体工学能够给受试者更好的康复体验。
3、本发明的技术方案是,一种下肢康复路径规划及优化方法,所述规划及优化方法具体如下:
4、步骤1:构建基于运动特征输出的规范化输出函数,具体过程为:
5、基于受试者站姿和坐姿状态下抬腿动作的人体运动特征输出,构建规范化输出函数,具体数学表达式如下:
6、y(t)=a0+a1cos(ωt)+b1sin(ωt)
7、其中,y(t)表示人体膝关节角度的输出值,t表示时间,规范化输出函数为描述人体运动姿态的膝关节角度关于时间的函数。
8、步骤2:构建基于人体工学的综合康复指标,具体过程为:
9、从人体工学的角度设计下肢康复外骨骼机器人单关节轨迹规划的综合康复指标,具体数学表达式如下:
10、
11、jd为引入的综合康复指标,jd由j1和j2两部分组成,分别为复杂度指标和舒适度指标,λ1和λ2分别为指标权值,需根据病人的具体情况进行设置,以调节舒适度和复杂度在下肢康复中的占比。
12、步骤3:基于综合康复指标通过黄金分割算法优化原始规范化输出函数,具体过程为:
13、以综合康复指标为约束,通过黄金分割算法找寻新的人体运动特征输出并拟合成优化后的规范化输出函数:
14、y(t)=a0+a1cos(ωt)+b1sin(ωt)
15、其中,y(t)表示人体膝关节角度的输出值,t表示时间,优化前后规范化输出函数的参数不同,以规划优化康复路径。
16、本发明的有益效果在于:(1)本方法将受试者膝关节角度作为人体下肢运动特征输出,采集受试者坐姿和站姿状态下轮换抬腿动作的下肢运动特征输出,对下肢运动特征输出进行傅里叶拟合得到关节角度关于时间的规范化输出函数,规划与实际人体运动间有高一致性下肢康复路径。(2)本方法基于人体工学引入舒适度指标和复杂度指标,利用舒适度指标和复杂度指标间的耦合关系组成综合康复指标,并通过综合康复指标约束得到优化后的规范化输出函数,使所规划康复路径有更好的康复体验。
技术特征:
1.一种基于肢体协调运动的下肢康复路径规划及优化方法,其特征在于,所述优化方法由三部分组成:第一部分为基于原始人体运动特征的规范化输出函数,用于规划康复训练的原始轨迹;第二部分为综合康复指标,用于对原始规范化输出函数进行约束优化;第三部分为基于优化后人体运动特征的规范化输出函数,用于规划符合人体工学的康复训练轨迹。
2.如权利要求1所述构建原始规范化输出函数,基于受试者站姿和坐姿状态下抬腿动作的人体运动特征输出,通过matlab工具箱傅里叶拟合拟合规范化输出函数:
3.如权利要求1所述综合康复指标,用于对原始规范化输出函数进行约束优化:
4.如权利要求1所述优化后规范化输出函数,以综合康复指标为约束,通过matlab工具箱将优化后的人体运动特征输出拟合成优化后的规范化输出函数:
技术总结
本发明公开一种下肢康复机器人的康复路径规划及优化方法,本发明基于受试者站姿和坐姿状态下抬腿动作的人体运动特征输出,构建原始规范化输出函数,从人体工学的角度设计单关节轨迹规划的综合康复指标,以综合康复指标为约束,通过黄金分割算法找寻新的人体运动特征输出并拟合成优化后的规范化输出函数。本发明解决了规划路径与实际人体动作间的一致性不高、对使用者康复体验和临床患者自身康复情况考虑不充分问题,实现高类人度的下肢康复路径规划及基于人体工学优化,使下肢康复机器人会以更自然的方式移动,确保患者的治疗符合日常行为模式,降低患者关节的疲劳和紧张程度,使治疗过程更舒适有效。
技术研发人员:孙中波,何天宇,严杨犇,许长贤,刘克平,米佳,易江,刘忠良
受保护的技术使用者:长春工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!