一种光波灼灸机器人的制作方法
本发明涉及灼灸设备领域,尤其涉及一种光波灼灸机器人。
背景技术:
1、灼灸是一种利用热量对进行理疗的疗法。通过将热量传递到人体的指定部位,以达到推动人体自身调和的目的。
2、公告号cn209108060u公开了一种用于灼灸的装置,包括底座,设置在底座上的套体,设置在套体内腔上方的升降筒,通过弹性件设置在所述升降筒内的升降轴,设置在所述升降轴下端用于固定艾制品的固定件,以及设置在所述套体上且用于升降轴沿升降筒上下移动的升降机构;采用底座为基体,在其上设置套体,并在套体上设置可以上下移动的升降轴,由于升降轴通过弹性件与升降筒实现连接,从而使得升降轴能够在升降筒下降后通过弹性件实现复位,为了更好地实现艾制品的固定,在升降轴的下端设置固定件,而为了实现升降轴的上下移动,在套体上设置升降机构从而实现升降轴的上下移动,实现艾制品的上下移动。
3、上述的灼灸装置采用可上下升降的艾制品进行灼灸,这种灼灸装置无法呈现灼灸前后人体的温度变化,无法直观地给患者呈现灼灸前后人体皮肤的变化。
技术实现思路
1、有鉴于此,有必要提供一种光波灼灸机器人,解决现有技术中的无法呈现灼灸前后人体的温度变化的技术问题。
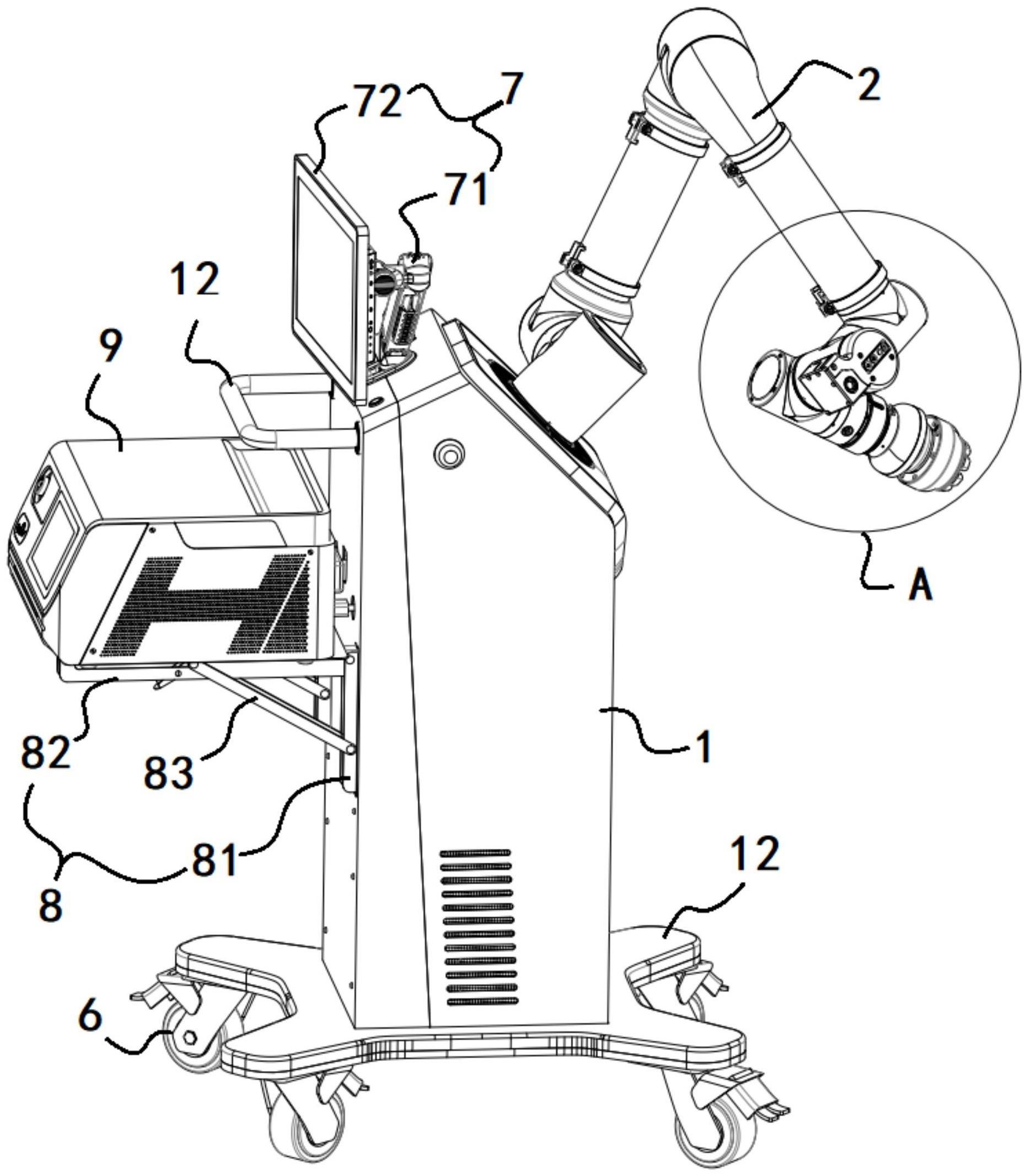
2、为达到上述技术目的,本发明的技术方案提供一种光波灼灸机器人,包括:
3、机体;
4、机械臂,具有固定端以及能够多自由度移动的移动端,所述固定端连接所述机体;
5、治疗头,所述治疗头连接所述机械臂的移动端,用于进行灼灸及按摩;
6、热成像摄像组件,连接所述机械臂的移动端,用于生成灼灸区域的热成像画面。
7、在其中的一个实施例中,还包括控制组件,所述控制组件包括:
8、三维成像器,连接所述机械臂的移动端,用于拍摄灼灸区域内的三维表面图像;
9、处理器,与所述三维成像器及所述机械臂均相连接,所述处理器用于规划治疗头的移动路径,并根据所述治疗头的移动路径及所述三维成像器获取的三维图像规划机械臂的活动轨迹。
10、在其中的一个实施例中,所述机体朝外形成有推手,所述推手呈u形,所述推手的两端连接机体。
11、在其中的一个实施例中,还包括多个滚轮,多个滚轮间隔设置于所述机体的底部。
12、在其中的一个实施例中,所述机体的底部朝外延伸出多个支撑部,所述滚轮与所述支撑部一一对应,所述滚轮设置于所述支撑部的底部,所述滚轮经所述支撑部可转动连接所述机体。
13、在其中的一个实施例中,还包括显示组件,所述显示组件包括支撑臂及显示器,所述支撑臂的一端连接所述机体,所述显示器连接所述支撑臂的另一端。
14、在其中的一个实施例中,还包括主机,所述主机连接所述机体,所述处理器内置于所述主机。
15、在其中的一个实施例中,所述主机的接线端朝向所述机体。
16、在其中的一个实施例中,还包括支架组件,所述支架组件包括第一固定架、第二固定架、第三固定架及限位件,所述第一固定架连接所述机体,所述第二固定架的一侧与所述第一固定架铰接,所述第三固定架的一侧与所述第一固定架铰接、另一侧滑动连接所述第二固定架,所述限位件连接所述第二固定架及所述第三固定架,用于限制所述第三固定架相对所述第二固定架滑动,所述主机固定于所述第二固定架,并经所述第二固定架固定于所述主机。
17、在其中的一个实施例中,所述主机与所述机械臂设置于所述机体的两侧。
18、与现有技术相比,本发明的有益效果包括:使用时,通过机械臂控制治疗头贴合人体指定的区域,并在机械臂的控制下,驱使治疗头贴合人体的同时沿预定的轨迹移动,治疗头贴合人体并对人体进行灼灸。
19、通过设置热成像摄像组件,在通过治疗头对人体进行灼灸之前,通过热成像摄像组件对人体待灼灸部位进行热成像,以获取待灼灸部位的热成像画面;通过治疗头对人体进行灼灸完后,通过热成像摄像组件对人体灼灸后部位进行热成像,以获取灼灸后部位的热成像画面,通过前后两个热成像画面的对比,可以清楚地指出前后温度变化,以让使用者能够直观的查看到前后对比。
技术特征:
1.一种光波灼灸机器人,其特征在于,包括:
2.根据权利要求1所述的光波灼灸机器人,其特征在于,还包括控制组件,所述控制组件包括:
3.根据权利要求1所述的光波灼灸机器人,其特征在于,所述机体朝外形成有推手,所述推手呈u形,所述推手的两端连接机体。
4.根据权利要求1所述的光波灼灸机器人,其特征在于,还包括多个滚轮,多个滚轮间隔设置于所述机体的底部。
5.根据权利要求4所述的光波灼灸机器人,其特征在于,所述机体的底部朝外延伸出多个支撑部,所述滚轮与所述支撑部一一对应,所述滚轮设置于所述支撑部的底部,所述滚轮经所述支撑部可转动连接所述机体。
6.根据权利要求1所述的光波灼灸机器人,其特征在于,还包括显示组件,所述显示组件包括支撑臂及显示器,所述支撑臂的一端连接所述机体,所述显示器连接所述支撑臂的另一端。
7.根据权利要求2所述的光波灼灸机器人,其特征在于,还包括主机,所述主机连接所述机体,所述处理器内置于所述主机。
8.根据权利要求7所述的光波灼灸机器人,其特征在于,所述主机的接线端朝向所述机体。
9.根据权利要求8所述的光波灼灸机器人,其特征在于,还包括支架组件,所述支架组件包括第一固定架、第二固定架、第三固定架及限位件,所述第一固定架连接所述机体,所述第二固定架的一侧与所述第一固定架铰接,所述第三固定架的一侧与所述第一固定架铰接、另一侧滑动连接所述第二固定架,所述限位件连接所述第二固定架及所述第三固定架,用于限制所述第三固定架相对所述第二固定架滑动,所述主机固定于所述第二固定架,并经所述第二固定架固定于所述主机。
10.根据权利要求9所述的光波灼灸机器人,其特征在于,所述主机与所述机械臂设置于所述机体的两侧。
技术总结
本发明公开了一种光波灼灸机器人,包括机体、机械臂、治疗头及热成像摄像组件,机械臂具有固定端以及能够多自由度移动的移动端,固定端连接机体;治疗头连接机械臂的移动端,用于进行灼灸及按摩;热成像摄像组件连接机械臂的移动端,用于生成灼灸区域的热成像画面。本发明能够有效对人体进行灼灸。通过设置热成像摄像组件,热成像摄像组件对人体待灼灸部位进行热成像,以获取待灼灸部位的热成像画面;通过治疗头对人体进行灼灸完后,通过热成像摄像组件对人体灼灸后部位进行热成像,以获取灼灸后部位的热成像画面,通过前后两个热成像画面的对比,可以清楚地指出前后温度变化,以让使用者能够直观地查看到前后对比。
技术研发人员:潘晓海,许平杰,卢松松,万胜
受保护的技术使用者:武汉医美伊光电子有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!