单孔/多孔手术机器人多自由度手术操作器械组件
本发明涉及医疗器械,具体涉及一种单孔/多孔手术机器人多自由度手术操作器械组件。
背景技术:
1、在现代微创手术中,手术机器人被用于多种外科疾病的治疗,通常微创手术需要开3个及以上的创口,会延长手术的愈合时间,影响疤痕的美观,因此单孔手术机器人逐渐开始应用,其被证明与多孔手术机器人具有同样的效果。单孔手术通过单一通道将多个手术操作器械及内窥镜送入创口,能够减少创伤、减少术中出血,缩短患者手术后期的创口愈合时间。
2、然而,现有的单孔手术通常需要3~4个手术操作器械同时存在于创口内,导致机器人机械臂彼此距离非常贴近,这就要求医生在术前花费更多的时间进行器械的校准以及位置的调试。而且现有的手术操作器械并未实现单孔手术和多孔手术的共用,无疑增加了研发和大规模应用的成本。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种单孔/多孔手术机器人多自由度手术操作器械组件,解决了单孔微创手术操作器械和多孔微创手术操作器械无法共用的技术问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
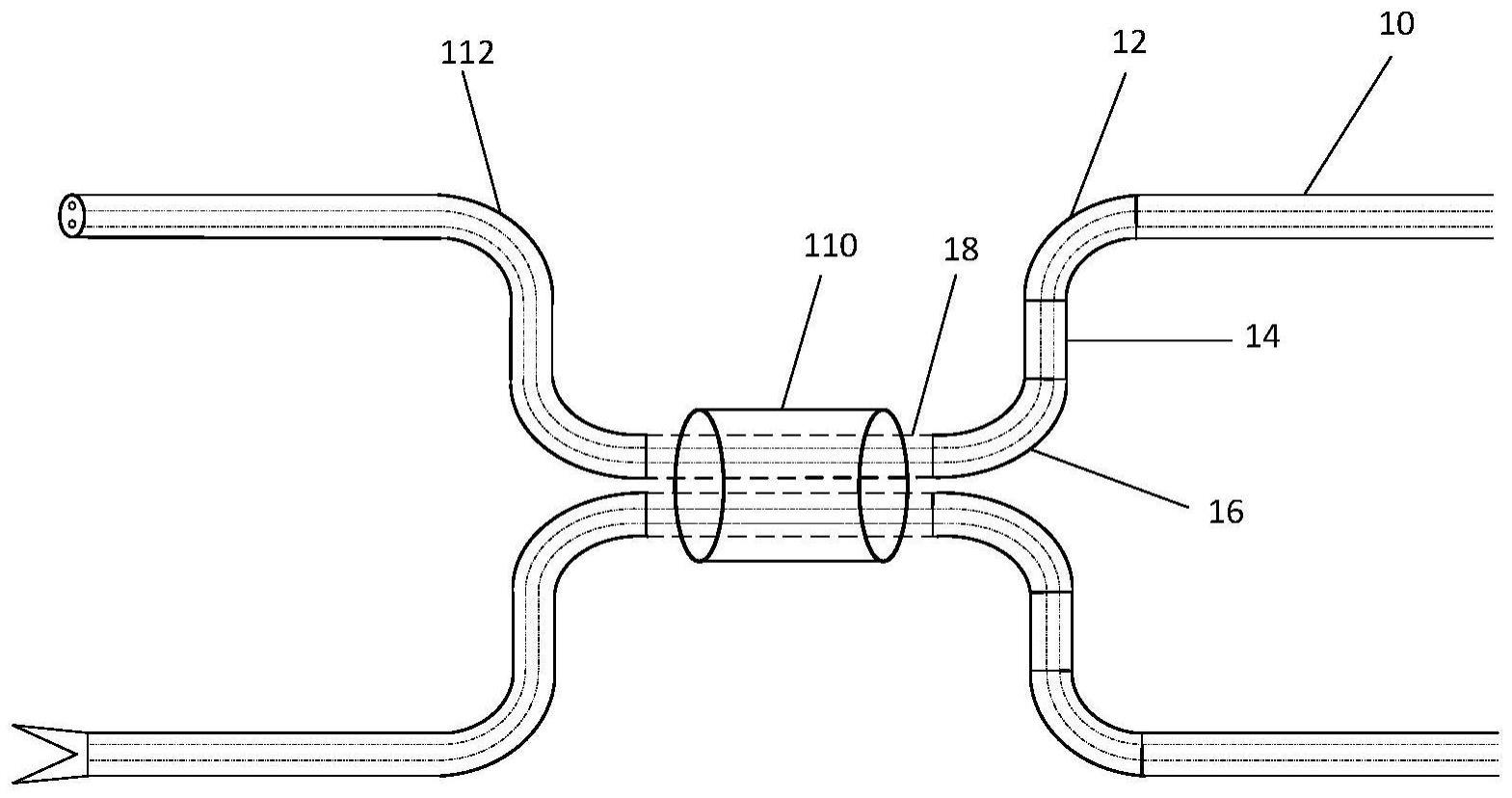
5、一种单孔/多孔手术机器人多自由度手术操作器械组件,包括第一硬性管道、第一软性管道、第二硬性管道和第二软性管道;
6、所述第一硬性管道一端通过手术器械直线操作管道与手术器械主体相连接,另一端与所述第一软性管道的首端相连接;
7、所述第二硬性管道一端与第一软性管道的尾端相连接,另一端与所述第二软性管道的首端相连接;
8、所述第二软性管道的尾端通过第三硬性管道与手术器械末端,所述第三硬性管道位于手术操作创口套管内;
9、所述第一软性管道和第二软性管道均可在弯曲或伸直状态下,套接对应形状的刚性套管转变为硬性管道。
10、优选的,在弯曲状态下,所述第一软性管道套接第一刚性套管,所述第二软性管道套接第三刚性套管;
11、或在伸直状态下,所述第一软性管道套接第二刚性套管,所述第二软性管道套接第四刚性套管。
12、优选的,还包括若干绳索,任一所述绳索的起始端通过联轴器与手术器械主体内部的控制电机相连接;
13、所述第一硬性管道和第二硬性管道均采用内部中空结构,所述第一硬性管道内部设有第一通孔板,所述第二硬性管道内部设有第二通孔板;
14、所述第一软性管道的尾端设有第三通孔板,所述第二软性管道的尾端设有第四通孔板;
15、第一组绳索穿过所述第一通孔板后与第三通孔板相连接;第二组绳索依次穿过所述第一通孔板、第一软性管道、第二通孔板后与第四通孔板相连接。
16、优选的,所述第一软性管道采用柔性的蛇骨结构或刚性的类蛇骨结构;所述第二软性管道采用柔性的蛇骨结构或刚性的类蛇骨结构;
17、其中,所述第一软性管道和/或第二软性管道采用刚性的类蛇骨结构时,对相应的绳索长度进行运动学补偿。
18、优选的,设定第一组绳索和第二组绳索均为4根,且分别关于相应的软性管道的中心轴均匀排布;所述对相应的绳索长度进行运动学补偿,具体是指:
19、定义所述类蛇骨结构的任意两个相互耦合的关节,两个关节之间设有支撑连杆;绳索为4根绳索的其中2根绳索,且关于所述支撑连杆对称;
20、所述手术器械主体内部的控制电机旋转角度,绳索受到电机的带动而拉伸关节旋转θ角度,绳索长度变化δl=2dsin(θ);
21、定义联轴器半径为r,则电机旋转带动的绳索长度变化等于关节弯曲时的绳索长度变化,即由此计算关节旋转角度θ;
22、计算所述电机旋转角度与关节旋转角度θ的差值并作为补偿值。
23、优选的,所述手术操作器械为腔镜、电钩、剪刀或持针器。
24、有益效果
25、本发明提供了一种单孔/多孔手术机器人多自由度手术操作器械组件,与现有技术相比,具备以下有益效果:
26、本发明中,硬性管道提供手术操作器械的强度支撑,并可带动相连的软性管道转动,而软性管道通过套接对应形状的刚性套管也可转变为硬性管道:在弯曲状态下,由于其具有的灵活自由度,可以组合多个相同结构的手术器械,通过手术中的固定创口进行手术,因此可应用于单孔机器人手术;在伸直状态下,由于外套刚性套管增加了手术器械管道的刚度和稳定性,因此可以单独使用,搭配机械臂使其可以其应用于多孔手术操作场景中。此外,双软性管道的设计使机械臂的运动空间大大增加,简化了医生进行单孔手术时复杂的术前调整环节,克服传统单孔手术操作器械的设计使得末端机械臂布局较为紧凑的技术缺陷。
技术特征:
1.一种单孔/多孔手术机器人多自由度手术操作器械组件,其特征在于,包括第一硬性管道(10)、第一软性管道(12)、第二硬性管道(14)和第二软性管道(16);
2.如权利要求1所述的单孔/多孔手术机器人多自由度手术操作器械组件,其特征在于,
3.如权利要求1所述的单孔/多孔手术机器人多自由度手术操作器械组件,其特征在于,还包括若干绳索,任一所述绳索的起始端通过联轴器与手术器械主体(104)内部的控制电机相连接;
4.如权利要求3所述的单孔/多孔手术机器人多自由度手术操作器械组件,其特征在于,
5.如权利要求4所述的单孔/多孔手术机器人多自由度手术操作器械组件,其特征在于,
6.如权利要求1~5任一项所述的单孔/多孔手术机器人多自由度手术操作器械组件,所述手术操作器械为腔镜、电钩、剪刀或持针器。
技术总结
本发明提供一种单孔/多孔手术机器人多自由度手术操作器械组件,涉及医疗器械技术领域。本发明中,硬性管道提供手术操作器械的强度支撑,并可带动相连的软性管道转动;软性管道包括蛇骨结构和类蛇骨结构两种不同的构型,其独特的设计可满足不同的单孔手术场景,并可通过外套刚性套管的方式增加软性管道的刚性和稳定性,进而可应用于多孔手术机器人,从而实现手术操作器械在单孔和多孔手术场景的共用。双软性管道的设计使机械臂的运动空间大大增加,简化了医生进行单孔手术时复杂的术前调整环节。同时绳索运动补偿的设计使类蛇骨结构也能进行360°旋转,相较于蛇骨结构有更好的刚性和稳定性,非常适用于操作精密性更高的应用场景。
技术研发人员:欧阳波,鉏建,杨善林
受保护的技术使用者:合肥工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!