一种穿刺器安装机构、手术机械臂及手术机器人的制作方法
本发明涉及手术机器人,尤其涉及一种穿刺器安装机构、手术机械臂及手术机器人。
背景技术:
1、手术机器人在医学领域内得到广泛应用。手术机器人包括患者手术端,患者手术端上设置有若干个手术机械臂。手术机械臂的末端设置有器械座,器械座上设置有移动端和穿刺器。手术器械的一端安装在移动端上,手术器械的另一端穿设于穿刺器,移动端能够带动手术器械沿穿刺器的轴线移动。
2、现有技术中,穿刺器通过安装机构安装至器械座上。根据中国专利cn218552436u公开的一种手术机器人的从端装置,戳卡(即穿刺器)通过无菌分隔板安装至机械臂上,戳卡与无菌分隔板以及无菌分隔板与机械臂之间均为可拆卸连接。无菌分隔板上安装有无菌袋,无菌袋能够在手术过程中套设在机械臂上,用于分隔机械臂与手术环境,避免由于机械臂中的细菌导致患者发生细菌感染的情况。
3、无菌袋的两端具有开口,其中一个开口固定在手术机械臂用于与台车固定的一端,另一个开口连接于沿周向无菌分隔板。通常无菌袋通过粘接或热压的方式固定在无菌分隔板的外侧,连接可靠性较低,在手术机械臂的移动过程中易受到拉扯,增大了无菌袋与无菌分隔板之间脱离的可能性,增大了患者发生细菌感染的可能性,影响手术安全,同时无菌袋脱离无菌分隔板后也增大了与其他手术器械缠绕的可能性,影响手术的顺利进行。
4、基于此,亟需一种穿刺器安装机构、手术机械臂及手术机器人用来解决如上提到的问题。
技术实现思路
1、本发明的目的在于提供一种穿刺器安装机构、手术机械臂及手术机器人,以提高无菌袋与分隔件之间连接的可靠程度,保证手术的顺利进行,也利于提高手术安全性。
2、为达此目的,本发明采用以下技术方案:
3、一种穿刺器安装机构,包括:
4、安装件,用于安装穿刺器;
5、转接件,用于与器械座的端部连接;
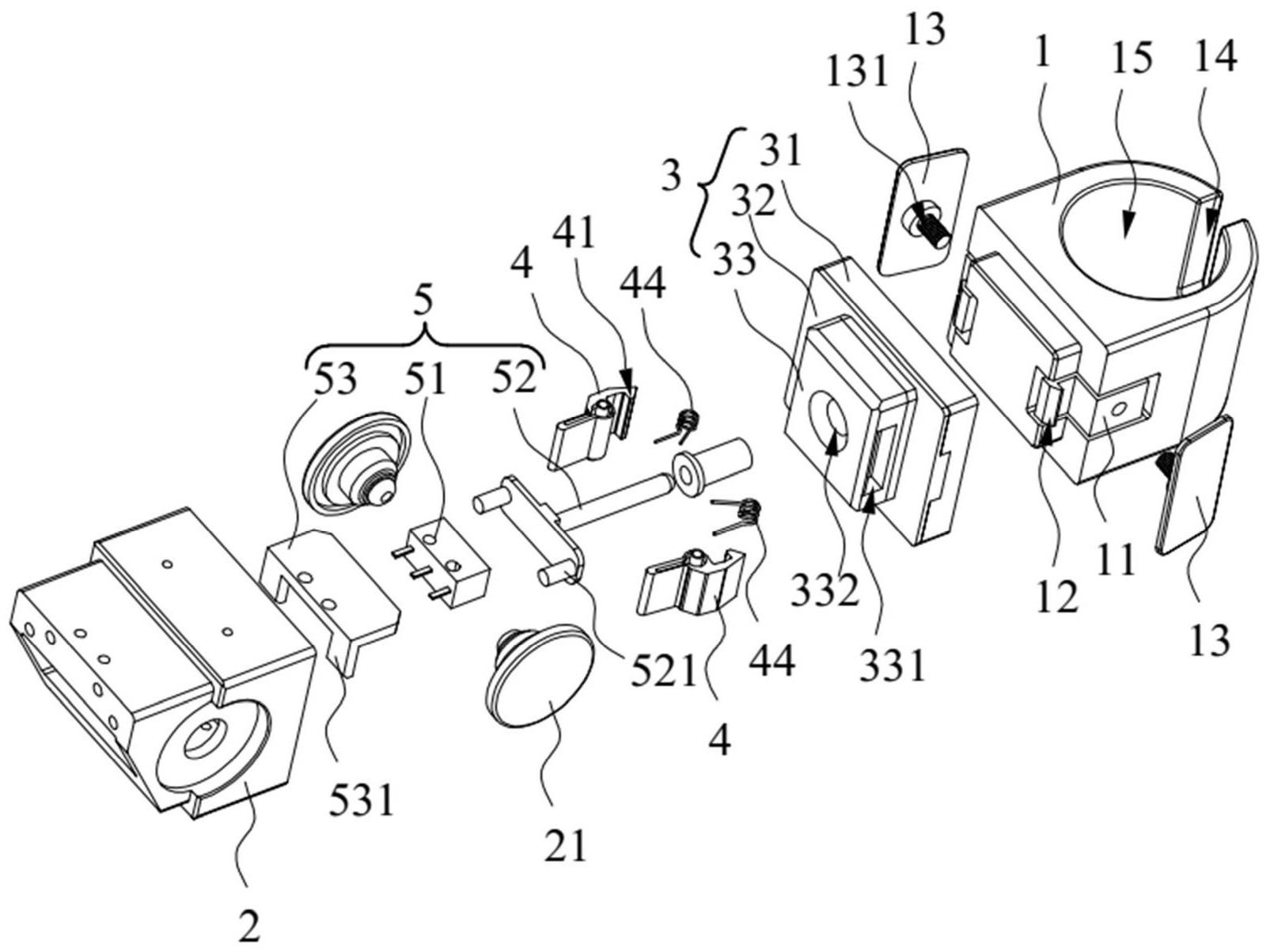
6、无菌分隔组件,包括无菌袋和分隔件,所述分隔件置于所述安装件与所述转接件之间,所述分隔件与所述安装件和所述转接件分别可拆卸连接,所述分隔件包括基板和压合板,所述基板置于所述压合板朝向所述安装件的一侧,所述无菌袋位于所述基板与压合板之间,所述基板与所述压合板中的一个上凸设有凸柱,所述压合板上凸设有凸柱,所述基板上开设有安装槽,所述凸柱置于所述安装槽内并与所述基板连接,以将所述无菌袋夹设固定在所述基板与压合板之间。
7、作为穿刺器安装机构的可选技术方案,所述安装件上设有第一卡接臂,所述第一卡接臂朝向所述分隔件的一端设置有第一卡勾,所述分隔件上开设有第一卡口,所述第一卡接臂与所述安装件活动连接,以使所述第一卡勾能够卡入或脱离所述第一卡口。
8、作为穿刺器安装机构的可选技术方案,所述第一卡接臂远离所述第一卡勾的一端转动连接于所述安装件,以使所述第一卡勾能够卡入或脱离所述第一卡口;
9、所述第一卡接臂设置于所述安装件的一侧,所述第一卡接臂相背于所述安装件的一侧连接有第一按压件,所述第一按压件与所述第一卡勾位于所述第一卡接臂的同一侧,所述第一按压件靠近所述分隔件的一端朝向逐渐远离所述安装件的方向倾斜。
10、作为穿刺器安装机构的可选技术方案,所述基板朝向所述安装件的端面上开设有容纳部,所述基板的侧壁上开设有凹槽,所述凹槽与所述容纳部连通,所述压合板朝向所述基板的一端凸出设置有定位部,所述定位部置于所述凹槽内,且所述定位部朝向所述容纳部的侧壁、所述凹槽的槽壁以及所述压合板朝向所述基板的端面围成所述第一卡口,所述第一卡勾能够置于所述容纳部内。
11、作为穿刺器安装机构的可选技术方案,所述转接件上设有第二卡接臂,所述第二卡接臂朝向所述分隔件的一端设置有第二卡勾,所述分隔件上开设有第二卡口,所述第二卡接臂与所述转接件活动连接,以使所述第二卡勾能够卡入或脱离所述第二卡口。
12、作为穿刺器安装机构的可选技术方案,所述转接件的内部中空且朝向所述分隔件的一端设置有开口,所述第二卡接臂置于所述转接件内侧;
13、所述分隔件还包括开槽件,所述开槽件的侧壁上开设有所述第二卡口,所述开槽件的一端连接于所述压合板,所述开槽件的另一端能够通过所述开口伸入或脱离所述转接件,以使所述第二卡口进入或退出所述转接件。
14、作为穿刺器安装机构的可选技术方案,所述转接件内固定设置有转轴,所述第二卡接臂的中部转动连接于所述转轴,以使所述第二卡勾能够卡入或脱离所述第二卡口;
15、所述转接件内设置有第一弹性件,所述第一弹性件能够使所述第二卡勾卡入所述第二卡口,所述转接件的侧壁上活动穿设有第二按压件,所述第二按压件的端部与所述第二卡接臂远离所述第二卡勾的一端抵接。
16、作为穿刺器安装机构的可选技术方案,所述穿刺器安装机构还包括检测组件,所述检测组件包括检测件和触发件,所述检测件设置于所述转接件上,所述触发件位于所述检测件朝向所述安装件的一侧且所述触发件的第一端朝向所述检测件设置,所述触发件相背于第一端的第二端朝向所述安装件设置,所述触发件与所述转接件活动连接,当所述安装件连接于所述分隔件且所述分隔件连接于所述转接件时,所述第二端与所述安装件抵接,所述触发件处于所述第一端与所述检测件接触的触发位置,当所述安装件脱离所述分隔件或所述分隔件脱离所述转接件时,所述触发件处于所述第一端与所述检测件间隔设置的避让位置。
17、作为穿刺器安装机构的可选技术方案,所述检测组件还包括第二弹性件,所述第二弹性件能够使所述触发件由所述触发位置回复至所述避让位置。
18、一种手术机械臂,包括穿刺器、器械座以及如上所述的穿刺器安装机构,所述穿刺器安装于所述安装件,所述转接件远离所述分隔件的一侧连接于所述器械座的端部。
19、一种手术机器人,包括如上所述的手术机械臂。
20、本发明的有益效果:
21、本发明提供了一种穿刺器安装机构,其包括安装件、转接件和无菌分隔组件。无菌袋通过分隔件安装在安装件和转接件之间,且安装件与分隔件之间以及转接件与分隔件之间均为可拆卸连接,便于在每次手术前更换无菌袋,降低了手术过程中发生细菌感染的可能性,保证了手术安全;此外,将无菌袋的端部通过夹设的方式固定在基板与压合板之间,提高了无菌袋与分隔件之间连接的可靠程度,避免了无菌袋与分隔件脱离,降低了无菌袋与手术器械或其他结构缠绕的可能性,保证了手术的顺利进行,降低了对于手术器械的移动的影响,同时也保证了无菌袋的分隔作用,进一步提高了手术安全性。
22、本发明提供了一种手术机械臂,便于在每次手术前更换无菌袋,保证了手术安全,同时避免了无菌袋与分隔件脱离,降低了无菌袋对于手术器械的移动的影响,保证了手术的顺利进行,同时也保证了无菌袋的分隔作用,进一步提高了手术安全性。
23、本发明提供了一种手术机器人,便于在每次手术前更换无菌袋,降低了无菌袋对于手术器械的移动的影响,保证了手术安全,同时也保证了无菌袋的分隔作用,提高了手术安全性。
技术特征:
1.一种穿刺器安装机构,其特征在于,包括:
2.根据权利要求1所述的穿刺器安装机构,其特征在于,所述安装件(1)上设有第一卡接臂(11),所述第一卡接臂(11)朝向所述分隔件(3)的一端设置有第一卡勾(12),所述分隔件(3)上开设有第一卡口(3131),所述第一卡接臂(11)与所述安装件(1)活动连接,以使所述第一卡勾(12)能够卡入或脱离所述第一卡口(3131)。
3.根据权利要求2所述的穿刺器安装机构,其特征在于,所述第一卡接臂(11)远离所述第一卡勾(12)的一端转动连接于所述安装件(1),以使所述第一卡勾(12)能够卡入或脱离所述第一卡口(3131);
4.根据权利要求2所述的穿刺器安装机构,其特征在于,所述基板(31)朝向所述安装件(1)的端面上开设有容纳部(312),所述基板(31)的侧壁上开设有凹槽(313),所述凹槽(313)与所述容纳部(312)连通,所述压合板(32)朝向所述基板(31)的一端凸出设置有定位部(322),所述定位部(322)置于所述凹槽(313)内,且所述定位部(322)朝向所述容纳部(312)的侧壁、所述凹槽(313)的槽壁以及所述压合板(32)朝向所述基板(31)的端面围成所述第一卡口(3131),所述第一卡勾(12)能够置于所述容纳部(312)内。
5.根据权利要求1所述的穿刺器安装机构,其特征在于,所述转接件(2)上设有第二卡接臂(4),所述第二卡接臂(4)朝向所述分隔件(3)的一端设置有第二卡勾(41),所述分隔件(3)上开设有第二卡口(331),所述第二卡接臂(4)与所述转接件(2)活动连接,以使所述第二卡勾(41)能够卡入或脱离所述第二卡口(331)。
6.根据权利要求5所述的穿刺器安装机构,其特征在于,所述转接件(2)的内部中空且朝向所述分隔件(3)的一端设置有开口,所述第二卡接臂(4)置于所述转接件(2)内侧;
7.根据权利要求6所述的穿刺器安装机构,其特征在于,所述转接件(2)内固定设置有转轴(42),所述第二卡接臂(4)的中部转动连接于所述转轴(42),以使所述第二卡勾(41)能够卡入或脱离所述第二卡口(331);
8.根据权利要求1所述的穿刺器安装机构,其特征在于,所述穿刺器安装机构还包括检测组件(5),所述检测组件(5)包括检测件(51)和触发件(52),所述检测件(51)设置于所述转接件(2)上,所述触发件(52)位于所述检测件(51)朝向所述安装件(1)的一侧且所述触发件(52)的第一端朝向所述检测件(51)设置,所述触发件(52)相背于第一端的第二端朝向所述安装件(1)设置,所述触发件(52)与所述转接件(2)活动连接,当所述安装件(1)连接于所述分隔件(3)且所述分隔件(3)连接于所述转接件(2)时,所述第二端与所述安装件(1)抵接,所述触发件(52)处于所述第一端与所述检测件(51)接触的触发位置,当所述安装件(1)脱离所述分隔件(3)或所述分隔件(3)脱离所述转接件(2)时,所述触发件(52)处于所述第一端与所述检测件(51)间隔设置的避让位置。
9.根据权利要求8所述的穿刺器安装机构,其特征在于,所述检测组件(5)还包括第二弹性件(54),所述第二弹性件(54)能够使所述触发件(52)由所述触发位置回复至所述避让位置。
10.一种手术机械臂,其特征在于,包括穿刺器(10)、器械座(20)以及如权利要求1-9任一项所述的穿刺器安装机构,所述穿刺器(10)安装于所述安装件(1),所述转接件(2)远离所述分隔件(3)的一侧连接于所述器械座(20)的端部。
11.一种手术机器人,其特征在于,包括如权利要求10所述的手术机械臂。
技术总结
本发明涉及手术机器人技术领域,公开了一种穿刺器安装机构、手术机械臂及手术机器人。穿刺器安装机构包括安装件、转接件和无菌分隔组件,无菌分隔组件包括无菌袋和分隔件,分隔件置于安装件与转接件之间,分隔件与安装件和转接件分别可拆卸连接,分隔件包括基板和压合板,基板置于压合板朝向安装件的一侧,无菌袋的端部位于基板与压合板之间,压合板上凸设有凸柱,基板上开设有安装槽,凸柱置于安装槽内并与基板连接,以将无菌袋夹设固定在基板与压合板之间。本发明能够提高无菌袋与分隔件之间连接的可靠程度,保证手术的顺利进行,也利于提高手术安全性。
技术研发人员:李建民,孔康,王炳强,王树新
受保护的技术使用者:山东威高手术机器人有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!