一种关节康复训练装置及其控制方法、控制设备与流程
本发明涉及医疗器械,尤其涉及一种关节康复训练装置及其控制方法、控制设备。
背景技术:
1、人的关节在遭受伤害或遭受严重疾病之后,虽然通过手术或药物等方式能够恢复关节的结构功能,但患者仍然需要进行较长时间的康复训练才能逐渐恢复对关节运动的控制。
2、当前对于关节的康复训练需要康复治疗师给出针对性指导训练,借助一些简单的康复辅助设备进行康复训练。然而,这种康复训练的大部分时间是在医院进行的,对患者的时间及经济造成较大的影响;并且,康复训练过程高度依赖于康复治疗师的个人判断,不同康复治疗师给出的康复训练往往是不同的,使得康复训练效果缺乏科学评定,导致康复训练效率较低。
3、即使患者接受了康复训练相关的培训,在家根据康复训练教程独自进行训练,由于不同患者的理解水平不同,自己在家独立训练时,既不知道训练方式是否正确,也不知道训练量是否达标,康复训练效果往往也较为一般。
技术实现思路
1、本发明实施例通过提供一种关节康复训练装置及其控制方法、控制设备,解决了现有关节康复训练效率较低的技术问题。
2、第一方面,本发明通过本发明的一实施例,提供了一种关节康复训练装置,包括:
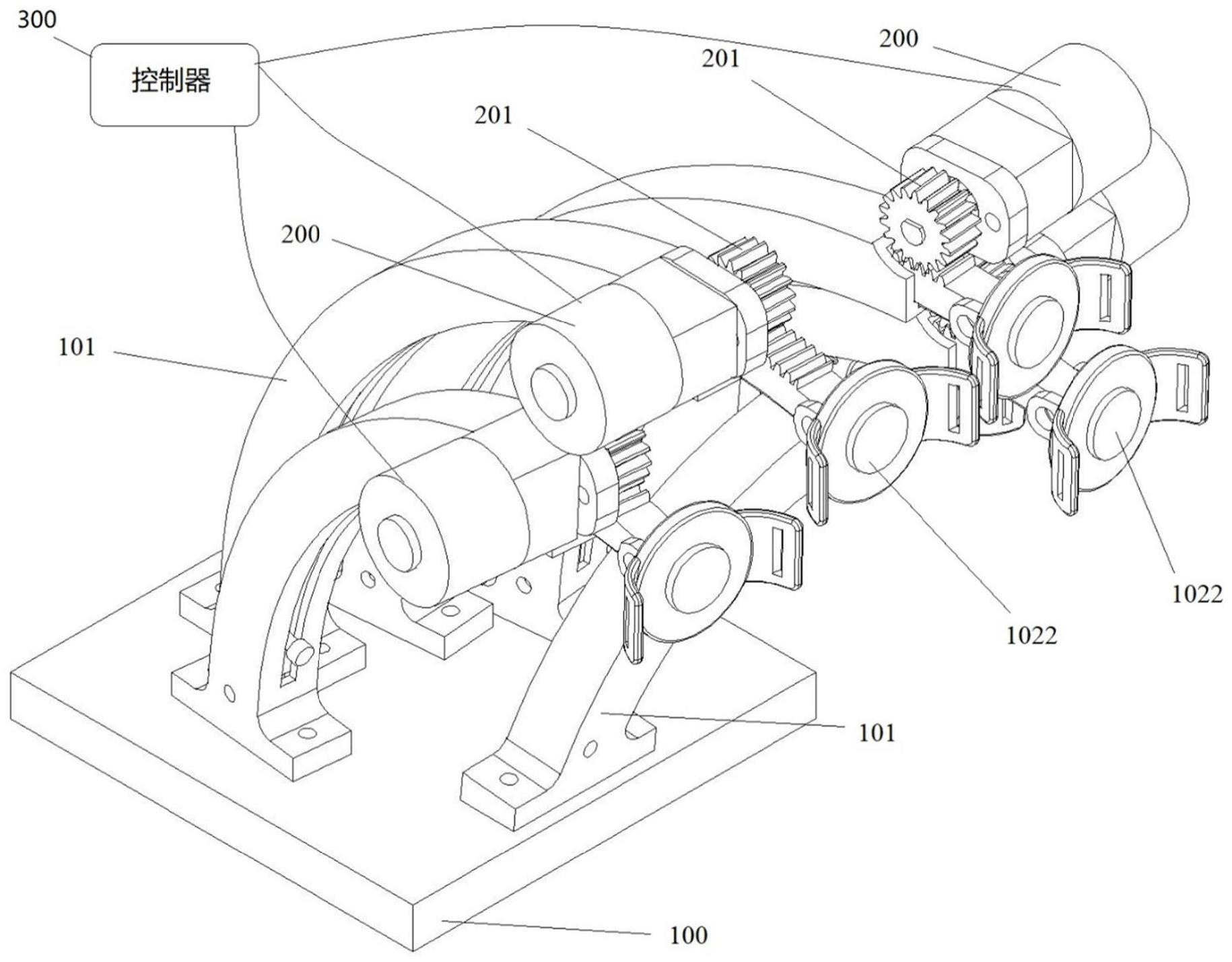
3、固定结构,所述固定结构上设置有一个或多个固定鞘;每个所述固定鞘中穿设有鞘条,所述鞘条与对应所述固定鞘滑动装配;每根所述鞘条上均设置有齿条以及用于固定关节的捆扎底座;
4、一个或多个驱动器,每个所述鞘条的齿条均啮合有一个所述驱动器的输出齿轮;
5、控制器,与一个或多个所述驱动器电性连接;所述控制器用于根据预设模式控制一个或多个所述驱动器工作,驱动对应所述鞘条做往复运动,使得所述捆扎底座带动关节运动。
6、作为一种可选的实施方式,所述预设模式包括全助力模式;所述控制器在所述全助力模式下,基于第一输出电参数控制所述一个或多个驱动器工作,驱动对应所述鞘条做往复运动,使得所述捆扎底座带动关节运动。
7、作为一种可选的实施方式,在所述捆扎底座捆扎有关节后,若关节产生主动运动带动对应鞘条产生运动,则通过所述驱动器获取对应输出齿轮的从动信息,并将所述从动信息发送给所述控制器。
8、作为一种可选的实施方式,所述预设模式还包括半助力模式;所述控制器在所述半助力模式下,根据所述从动信息生成补偿输出电参数,并基于所述第一输出电参数以及所述补偿输出电参数控制所述一个或多个驱动器工作,驱动对应所述鞘条做往复运动,使得所述捆扎底座带动关节运动。
9、作为一种可选的实施方式,所述预设模式还包括费力模式;所述控制器在所述费力模式下,基于第二输出电参数控制所述一个或多个驱动器工作,阻碍对应所述鞘条做往复运动,使得所述捆扎底座阻碍关节运动。
10、作为一种可选的实施方式,所述控制器在所述费力模式下,根据所述从动信息生成补偿输出电参数,并基于所述第二输出电参数以及所述补偿输出电参数控制所述一个或多个驱动器工作,阻碍对应所述鞘条做往复运动,使得所述捆扎底座阻碍关节运动。
11、第二方面,本发明通过本发明的一实施例,提供了一种关节康复训练装置的控制方法,应用于第一方面中任一所述的关节康复训练装置,所述方法包括:使所述控制器在所述预设模式下控制一个或多个所述驱动器工作,利用对应驱动器驱动对应所述鞘条做往复运动,以使得所述捆扎底座带动关节运动。
12、作为一种可选的实施方式,在检测到所述捆扎底座捆扎有关节,且关节产生主动运动带动对应鞘条产生运动后,通过所述驱动器获取对应输出齿轮的从动信息,并将所述从动信息发送给所述控制器;利用所述控制器处理所述从动信息,以得到关节的运动输出信息。
13、第三方面,本发明通过本发明的一实施例,提供了一种关节康复训练装置的控制设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的代码,所述处理器执行所述代码时实现第二方面中任一实施方式。
14、第四方面,本发明通过本发明的一实施例,提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现第二方面中任一实施方式。
15、本发明实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
16、在固定结构上设置一个或多个固定鞘,每个固定鞘中穿设有鞘条,鞘条与对应固定鞘滑动装配,并且每根鞘条上均设置有齿条以及用于固定关节的捆扎底座。通过每个鞘条的齿条啮合一个驱动器的输出齿轮,使得鞘条能够在驱动器的驱动下在固定鞘中来回滑动。再通过设置与一个或多个驱动器电性连接的控制器,使控制器在预设模式下控制一个或多个驱动器工作,驱动对应鞘条做往复运动,从而使得捆扎底座能够带动关节运动,实现对关节的康复训练。
技术特征:
1.一种关节康复训练装置,其特征在于,包括:
2.如权利要求1所述的装置,其特征在于,所述预设模式包括全助力模式;
3.如权利要求2所述的装置,其特征在于,在所述捆扎底座捆扎有关节后,若关节产生主动运动带动对应鞘条产生运动,则通过所述驱动器获取对应输出齿轮的从动信息,并将所述从动信息发送给所述控制器。
4.如权利要求3所述的装置,其特征在于,所述预设模式还包括半助力模式;
5.如权利要求3所述的装置,其特征在于,所述预设模式还包括费力模式;
6.如权利要求5所述的装置,其特征在于,所述控制器在所述费力模式下,根据所述从动信息生成补偿输出电参数,并基于所述第二输出电参数以及所述补偿输出电参数控制所述一个或多个驱动器工作,阻碍对应所述鞘条做往复运动,使得所述捆扎底座阻碍关节运动。
7.一种关节康复训练装置的控制方法,其特征在于,应用于如权利要求1-6中任一所述的关节康复训练装置,所述方法包括:
8.如权利要求7所述的方法,其特征在于,在检测到所述捆扎底座捆扎有关节,且关节产生主动运动带动对应鞘条产生运动后,通过所述驱动器获取对应输出齿轮的从动信息,并将所述从动信息发送给所述控制器;
9.一种关节康复训练装置的控制设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的代码,其特征在于,所述处理器执行所述代码时实现权利要求7-8中任一所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求7-8中任一所述的方法。
技术总结
本发明实施例提供了一种关节康复训练装置及其控制方法、控制设备。关节康复训练装置包括固定结构、驱动器以及控制器。通过在固定结构上设置一个或多个固定鞘,每个固定鞘中穿设有鞘条,鞘条与对应固定鞘滑动装配,并且每根鞘条上均设置有齿条以及用于固定关节的捆扎底座。将每个鞘条的齿条啮合一个驱动器的输出齿轮,使得鞘条能够在驱动器的驱动下在固定鞘中来回滑动。再通过设置与一个或多个驱动器电性连接的控制器,使控制器在预设模式下控制一个或多个驱动器工作,驱动对应鞘条做往复运动,从而使得捆扎底座能够带动关节运动,实现对关节的康复训练。
技术研发人员:栾会芹,张维康,栾宜强,李琦
受保护的技术使用者:厦门威恩科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!