一种多模绳驱动力系统的制作方法
本说明书涉及医学诊断治疗领域,特别涉及一种多模绳驱动力系统。
背景技术:
1、在使用医学探针时,需要将医学探针介入患者病灶(例如,脑部病灶)。因此,对医学探针的准确性和使用环境具有很高的要求。常见的医学探针的驱动系统通常为手动驱动系统,无法实现对医学探针的精准控制,降低了医学探针的疗效和安全性。而电动驱动系统由于结构复杂难以清洗,为了保证无菌状态,整套电动驱动系统只能为一次性耗材,成本高昂。
2、因此,亟需一种新的多模驱动系统,以解决上述问题,有效实现在无菌环境下精准地控制医学探针,提高控制医学探针使用的准确性和安全性。
技术实现思路
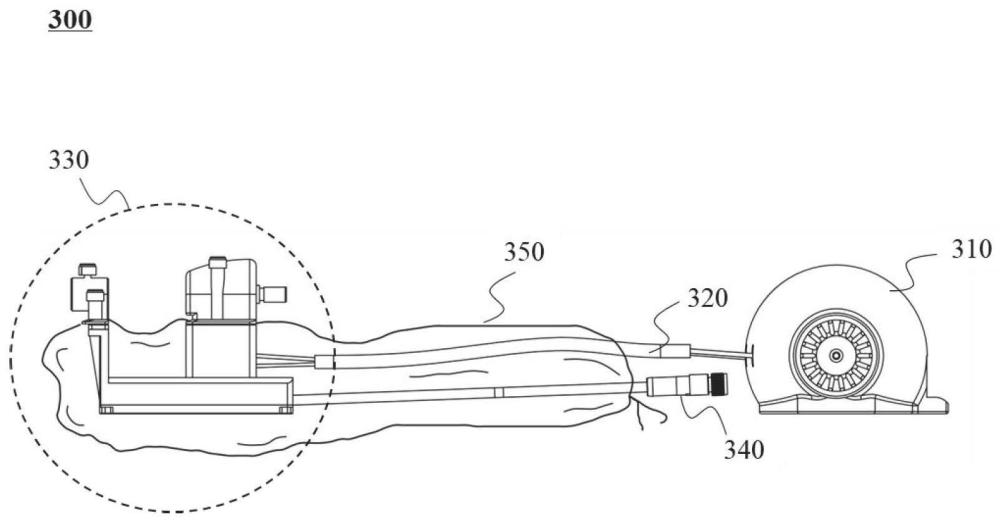
1、本说明书一个方面提供一种多模绳驱动力系统。所述多模动力装置包括多模动力装置、线缆和运动执行机构。线缆分别与多模动力装置和运动执行机构连接;多模动力装置被配置为向执行运动机构提供驱动力;以及运动执行机构与医学探针连接,被配置为基于驱动力,控制医学探针进行多自由度运动。
2、在一些实施例中,多自由度运动包括线性平移运动和旋转运动,运动执行机构包括平移运动模块和旋转运动模块。基于驱动力,控制医学探针进行多自由度运动包括:基于驱动力,控制平移运动模块使得医学探针进行线性平移运动;以及基于驱动力,控制旋转运动模块使得医学探针进行旋转运动。
3、在一些实施例中,运动执行机构还包括无菌转接装置,无菌转接装置可拆卸地连接在旋转运动模块上,医学探针连接固定连接在无菌转接装置上。
4、在一些实施例中,多模绳驱动力系统还包括无菌装置,无菌装置固定连接在无菌转接装置上以形成无菌屏障,无菌转接装置和无菌装置为一次性耗材。
5、在一些实施例中,无菌装置包括无菌袋和无菌薄膜中的至少一个。
6、在一些实施例中,驱动力包括第一驱动力和第二驱动力。多模动力装置包括:至少一个手动驱动单元和至少一个自动驱动单元。至少一个手动驱动单元被配置为向运动执行机构提供第一驱动力;以及至少一个自动驱动单元被配置为向运动执行机构提供第二驱动力,其中,通过手动驱动单元,切换控制机构的工作模式。
7、在一些实施例中,控制机构的工作模式包括对应自动驱动单元的自动控制模式和对应手动驱动单元的手动控制模式。
8、在一些实施例中,通过手动驱动单元,切换控制机构的工作模式包括:手动驱动单元从第一位置运动到第二位置,使得控制机构的工作模式从自动控制模式切换到手动控制模式;或手动驱动单元从第二位置运动到第一位置,使得控制机构的工作模式从手动控制模式切换到自动控制模式。
9、在一些实施例中,多模动力装置还包括弹性件。通过手动驱动单元,切换控制机构的工作模式包括:手动驱动单元从第一位置运动到第二位置,使得控制机构的工作模式从自动控制模式切换到手动控制模式;或手动驱动单元从第二位置自动回弹到第一位置,使得控制机构的工作模式从手动控制模式切换到自动控制模式。
10、在一些实施例中,多模绳驱动力系统还包括传输装置,传输装置被配置为输出医学探针进行的多自由度运动的运动信息,运动信息包括位置信息和角度信息中的至少一种。
技术特征:
1.一种多模绳驱动力系统,其特征在于,包括多模动力装置、线缆和运动执行机构,其中
2.根据权利要求1所述的多模绳驱动力系统,其特征在于,所述多自由度运动包括线性平移运动和旋转运动,所述运动执行机构包括平移运动模块和旋转运动模块,和所述基于所述驱动力,控制所述医学探针进行多自由度运动包括:
3.根据权利要求2所述的多模绳驱动力系统,其特征在于,所述运动执行机构还包括无菌转接装置,所述无菌转接装置可拆卸地连接在所述旋转运动模块上,所述医学探针连接固定连接在所述无菌转接装置上。
4.根据权利要求3所述的多模绳驱动力系统,其特征在于,所述多模绳驱动力系统还包括无菌装置,所述无菌装置固定连接在所述无菌转接装置上以形成无菌屏障,所述无菌转接装置和所述无菌装置为一次性耗材。
5.根据权利要求4所述的多模绳驱动力系统,其特征在于,所述无菌装置包括无菌袋和无菌薄膜中的至少一个。
6.根据权利要求1所述的多模绳驱动力系统,其特征在于,所述驱动力包括第一驱动力和第二驱动力,和所述多模动力装置包括:
7.根据权利要求6所述的多模绳驱动力系统,其特征在于,所述控制机构的工作模式包括对应所述自动驱动单元的自动控制模式和对应所述手动驱动单元的手动控制模式。
8.根据权利要求7所述的多模绳驱动力系统,其特征在于,所述通过所述手动驱动单元,切换所述控制机构的工作模式包括:
9.根据权利要求7所述的多模绳驱动力系统,其特征在于,所述多模动力装置还包括弹性件,所述通过所述手动驱动单元,切换所述控制机构的工作模式包括:
10.根据权利要求1所述的多模绳驱动力系统,其特征在于,所述多模绳驱动力系统还包括传输装置,所述传输装置被配置为输出所述医学探针进行的多自由度运动的运动信息,所述运动信息包括位置信息和角度信息中的至少一种。
技术总结
本说明书实施例提供一种多模绳驱动力系统。该多模绳驱动力系统包括多模动力装置、线缆和运动执行机构。线缆分别与多模动力装置和运动执行机构连接。多模动力装置被配置为向执行运动机构提供驱动力。运动执行机构与医学探针连接,被配置为基于驱动力,控制医学探针进行多自由度运动。
技术研发人员:李稣,黄文景,陈士行
受保护的技术使用者:上海超光微医疗科技有限公司
技术研发日:
技术公布日:2025/2/20
- 还没有人留言评论。精彩留言会获得点赞!