阵列式气电联合的腕手一体化康复手套及方法与流程
本发明涉及康复手套,具体为阵列式气电联合的腕手一体化康复手套及方法。
背景技术:
1、手是人类最为精巧的器官也是使用频率最高的部位,手部的骨骼、肌肉和神经的解剖结构是相对复杂的,手部手术后常伴随各种后遗症和并发症,需要康复治疗,一般康复治疗方式有:物理因子治疗、运动作业治疗和辅具治疗。但是以上的康复手段都有明显缺陷,大多数都是单因子治疗,比如:单独辅助手的伸展和抓握动作或单纯电刺激,都难以达到好的疗效。
2、手部物理康复治疗中主要分为两类,一类是末端运动辅助,一类是手部肌肉激活,末端运动辅助是通过穿戴外骨骼式康复手套来实现运动,但是外骨骼式康复手套的康复主要是针对末端的运动,而人类的手部运动是通过肌肉收缩或放松来带动骨骼运动,单纯的骨骼运动辅助无法实现骨骼肌肉系统收缩和放松,只能防止肌肉的萎缩;手部肌肉激活是通过电刺激设备能够刺激到肌肉进行收缩和放松,但是电刺激的刺激深度和位置不足导致肌肉收缩无法带动骨骼运动达不到需求的运动范围,传统两种的治疗方案的分离导致康复效果和效率不佳。
3、因此,需要一种将外骨骼和电刺激结合的康复手套,来复现人手自然运动,充分激活手部骨骼肌肉系统,提升康复效果和效率。
技术实现思路
1、本发明的目的在于提供阵列式气电联合的腕手一体化康复手套及方法,以解决上述背景技术中提出的问题。
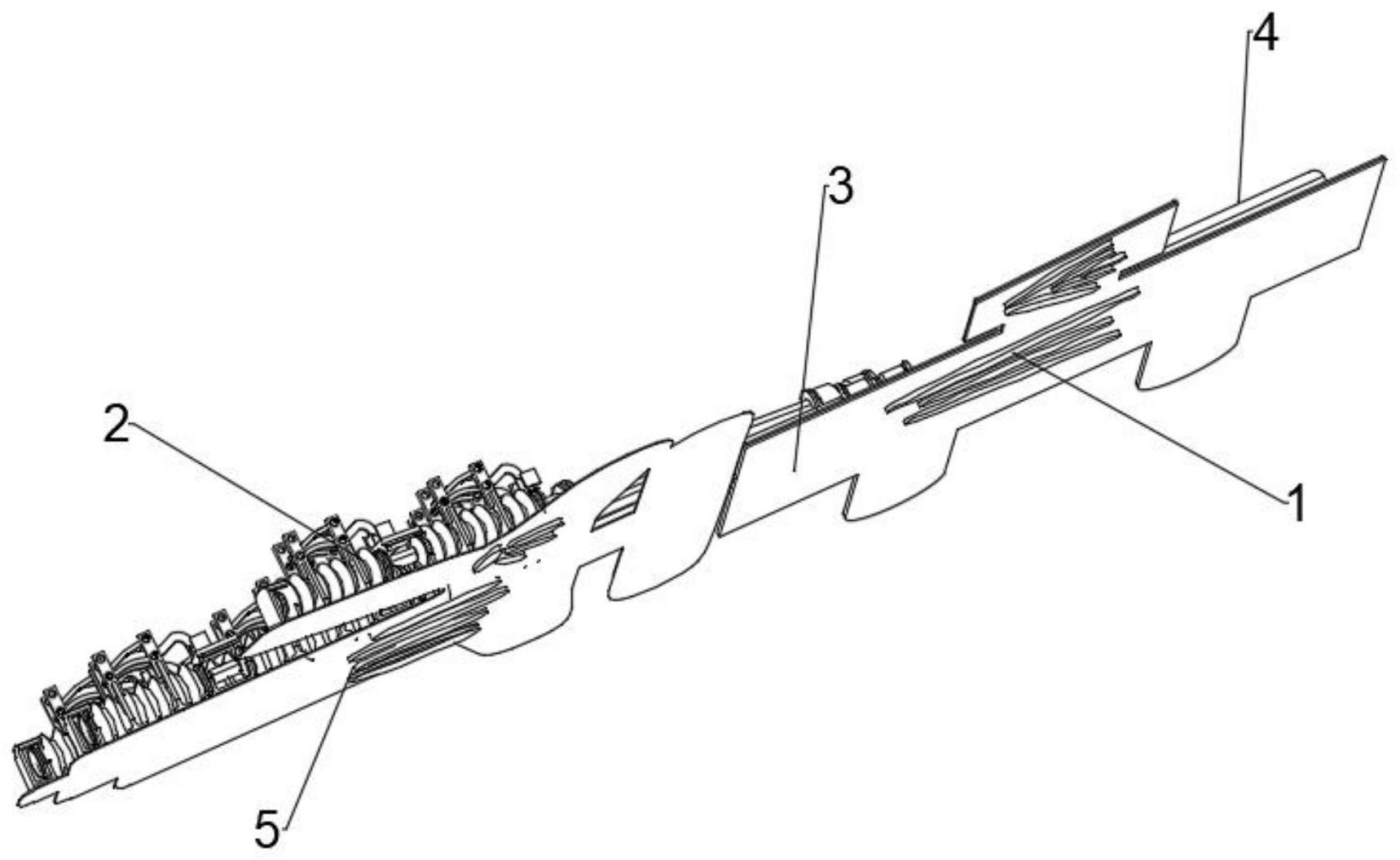
2、为了解决上述技术问题,本发明提供如下技术方案:康复手套包括阵列式电极、外骨骼组件、手套本体、控制器,阵列式电极与手套本体紧固连接,外骨骼组件与手套本体紧固连接,外骨骼组件沿手套本体上的手指方向布置,控制器与阵列式电极电连接,控制器与外骨骼组件连通。
3、阵列式电极固定在手套本体的内侧,外骨骼组件固定在手套本体的外侧,将阵列式电极和外骨骼组件集成在手套本体上,形成一体化设计,控制器用于输出微电流通过阵列式电极刺激对应的肌肉群,外骨骼组件能够辅助手指进行屈曲或伸展运动,通过将电刺激与外骨骼辅助运动结合,提高了康复效果和效率。
4、进一步的,阵列式电极包括手掌部电极和前臂部电极,手掌部电极与手套本体紧固连接,前臂部电极与手套本体紧固连接,手掌部电极和前臂部电极依照人体肌肉位置布置。
5、手掌部电极通过魔术贴固定在手套本体的手掌内部,前臂部电极通过魔术贴固定在手套本体的手臂部分,为了保证电信号的检测准确性,阵列式电极沿着肌纤维的方向排列。
6、进一步的,外骨骼组件包括波纹管、固定座、气管,波纹管与固定座卡接,固定座与手套本体紧固连接,波纹管的进气端与气管连通,气管的进气端与控制器连通。
7、固定座与波纹管之间通过卡扣相互连接,固定座固定在手套本体的背部,来约束波纹管的运动方向,同时增大波纹管运动的刚度,控制器通过气管为波纹管充放气,来实现波纹管的伸长和收缩,进而实现辅助手指运动的效果。
8、进一步的,波纹管设有五组,五组波纹管顺沿手指方向进行布置。
9、波纹管顺沿手指方向进行布置,主要包含大拇指、食指、中指、无名指和小指,能够辅助手指进行屈曲或伸展运动。
10、进一步的,控制器包括气动控制模块、电刺激模块、肌电采集模块,气动控制模块与波纹管连通,电刺激模块与阵列式电极电连接,肌电采集模块与阵列式电极电连接。
11、控制器为康复手套的主要控制系统,能够通过肌电采集模块检测人体的肌电信号进行分析,并通过气动控制模块和电刺激模块配合辅助手指运动,气动控制模块主要用于控制外骨骼组件的运动,充气外骨骼组件弯曲、吸气外骨骼组件伸展,电刺激模块主要用于输出微电流通过阵列式电极刺激对应的肌肉群,肌电采集模块主要通过阵列式电极采集对应肌肉的肌电信号用于分析。
12、进一步的,康复手套还包括贴合组件,贴合组件与手套本体紧固连接,贴合组件与阵列式电极位置对应,贴合组件与控制器电连接。
13、在对人体肌肉进行肌电信号的采集时,需要将电极片贴合到人体皮肤的表面,但是康复手套仅通过魔术贴绑缚在手臂上,电极片的贴合不够紧密,难以保证肌电信号采集的精准度,通过贴合组件将阵列式电极紧紧贴合在人体皮肤表面,并通过控制器控制贴合组件的压力,提高肌电信号采集的精确性。
14、进一步的,贴合组件包括气囊、保护膜、电阻应变片,气囊与手套本体紧固连接,电阻应变片与气囊紧固连接,气囊与气动控制模块连通,电阻应变片与控制器电连接,保护膜电阻应变片紧固连接,保护膜与阵列式电极抵接。
15、在进行肌电信号采集时,控制器控制气动控制模块为气囊充气,给对应的阵列式电极施加压力,使其紧密贴合在人体皮肤表面,并在气囊和阵列式电极之间设置电阻应变片,保护膜采用塑料薄膜,具有绝缘性,防止电流影响阵列式电极,这样在压力的作用下,电阻应变片受力会压缩,电流的过流截面会变小,阻值会变大,因此压力越大,电阻应变片的阻值就越大,控制器为电阻应变片通上检测电流,通过检测电阻应变片的阻值大小来实时控制气动控制模块为气囊的充气压力,使得阵列式电极受到的压力保持一致,提高肌电信号采集的精确性。
16、进一步的,使用方法包括以下步骤:
17、1)肌电信号采集;
18、通过阵列式电极对肌电信号进行采集,并通过控制器进行分析。
19、2)电刺激与气动驱动同步进行;
20、控制器中控制算法通过肌电信号通道和电刺激信号边刺激边采集实现对人手自然运动模式的精准复现,同时配合外骨骼手套运动的气压调控。
21、3)气压保持;
22、波纹管内的压力保持一定时间,帮助患者纠正不正确的肌肉发力。
23、与现有技术相比,本发明所达到的有益效果是:本发明通过融合阵列式电极和外骨骼手套一体化设计,实现手部多肌肉的点对点刺激和外骨骼运动精准辅助,能够有效的激活手部肌肉和骨骼的运动,特别是阵列式电刺激能够精准调控肌肉刺激,和手部自然运动模式中的肌肉运动相匹配,复现自然的运动。控制器中控制算法通过肌电信号通道和电刺激信号边刺激边采集实现对人手自然运动模式的精准复现,同时配合外骨骼手套运动的气压调控,实现了实时精准肌肉和骨骼运动匹配。帮助患者纠正不正确的肌肉发力和运动错误,提升了康复效率和效果;通过检测电阻应变片的阻值大小来实时控制气动控制模块给气囊的充气压力,使得阵列式电极受到的压力保持一致,并紧紧贴合在人体皮肤表面,提高肌电信号采集的精确性。
技术特征:
1.阵列式气电联合的腕手一体化康复手套,其特征在于:所述康复手套包括阵列式电极(1)、外骨骼组件(2)、手套本体(3)、控制器(4),所述阵列式电极(1)与手套本体(3)紧固连接,所述外骨骼组件(2)与手套本体(3)紧固连接,所述外骨骼组件(2)沿手套本体(3)上的手指方向布置,所述控制器(4)与阵列式电极(1)电连接,所述控制器(4)与外骨骼组件(2)连通。
2.根据权利要求1所述的阵列式气电联合的腕手一体化康复手套,其特征在于:所述阵列式电极(1)包括手掌部电极(11)和前臂部电极(12),所述手掌部电极(11)与手套本体(3)紧固连接,所述前臂部电极(12)与手套本体(3)紧固连接,所述手掌部电极(11)和前臂部电极(12)依照手部肌肉位置布置。
3.根据权利要求2所述的阵列式气电联合的腕手一体化康复手套,其特征在于:所述外骨骼组件(2)包括波纹管(21)、固定座(22)、气管(23),所述波纹管(21)与固定座(22)卡接,所述固定座(22)与手套本体(3)紧固连接,所述波纹管(21)的进气端与气管(23)连通,所述气管(23)的进气端与控制器(4)连通。
4.根据权利要求3所述的阵列式气电联合的腕手一体化康复手套,其特征在于:所述波纹管(21)设有五组,五组所述波纹管(21)顺沿手指方向进行布置。
5.根据权利要求4所述的阵列式气电联合的腕手一体化康复手套,其特征在于:所述控制器(4)包括气动控制模块(41)、电刺激模块(42)、肌电采集模块(43),所述气动控制模块(41)与波纹管(21)连通,所述电刺激模块(42)与阵列式电极(1)电连接,所述肌电采集模块(43)与阵列式电极(1)电连接。
6.根据权利要求5所述的阵列式气电联合的腕手一体化康复手套,其特征在于:所述康复手套还包括贴合组件(5),所述贴合组件(5)与手套本体(3)紧固连接,所述贴合组件(5)与阵列式电极(1)位置对应,所述贴合组件(5)与控制器(4)电连接。
7.根据权利要求6所述的阵列式气电联合的腕手一体化康复手套,其特征在于:所述贴合组件(5)包括气囊(51)、保护膜(52)、电阻应变片(53),所述气囊(51)与手套本体(3)紧固连接,所述气囊(51)与气动控制模块(41)连通,所述电阻应变片(53)与气囊(51)紧固连接,所述电阻应变片(53)与控制器(4)电连接,所述保护膜(52)电阻应变片(53)紧固连接,所述保护膜(52)与阵列式电极(1)抵接。
8.根据权利要求7所述的阵列式气电联合的腕手一体化康复手套的使用方法,其特征在于:所述使用方法包括以下步骤:
技术总结
本发明公开了阵列式气电联合的腕手一体化康复手套及方法,康复手套包括阵列式电极、外骨骼组件、手套本体、控制器,阵列式电极与手套本体紧固连接,外骨骼组件与手套本体紧固连接,外骨骼组件沿手套本体上的手指方向布置,控制器与阵列式电极电连接,控制器与外骨骼组件连通,阵列式电极固定在手套本体的内侧,外骨骼组件固定在手套本体的外侧,将阵列式电极和外骨骼组件集成在手套本体上,形成一体化设计,控制器用于输出微电流通过阵列式电极刺激对应的肌肉群,外骨骼组件能够辅助手指进行屈曲或伸展运动,通过将电刺激与外骨骼辅助运动结合,提高了康复效果和效率。
技术研发人员:袁路林,史志怀,杨瑞嘉
受保护的技术使用者:南京锐诗得医疗科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!