一种超声探头三维定位方法与流程
本发明涉及三维超声领域,尤其涉及一种超声探头三维定位方法。
背景技术:
1、超声检查是一种基于超声波的医学影像学诊断技术,可以对人体组织进行可视化成像,从而发现人体组织中的病灶。使用普通超声探头进行超声检查时一般只能获取到二维超声图像,通过二维超声图像筛查人体病灶主要依赖于超声医生的经验和手法。针对二维超声图像,若由于超声医生经验欠缺等因素会导致超声检查无法达到预期效果。
2、若可以对二维超声图像进行三维重建则可提供更直观、丰富、全面的超声检查部位诊断信息,提高超声检查的疾病诊断水平。让二维超声图像具有空间三维位姿信息是实现二维超声图像三维重建的必要条件。
3、目前超声探头实现三维定位主要是依靠外部传感器设备进行定位的,如电磁感应设备、外部视觉追踪设备,现有的超声探头三维定位系统庞大复杂,定位传感器设备昂贵笨重,增大了二维超声图像向三维超声图像转换的难度。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的问题之一。为此,本发明的目的在于提供一种超声探头三维定位方法,利用与超声探头固定且同步移动的摄像头来获取超声探头的三维空间位姿,可以显著降低超声探头三维定位系统的复杂度,降低系统搭建和使用成本,扩大超声三维定位系统的使用场景,提高系统的便携性和易用性。
2、为了实现上述目的,本申请采用如下技术方案:一种超声探头三维定位方法,包括:
3、摄像头与超声探头固定连接且保持同步移动;
4、根据所述摄像头和超声探头之间的位置关系,将所述摄像头对应的的三维空间位姿转换为相同时刻下超声探头对应的三维空间位姿,利用超声探头对应的三维空间位姿实现对超声探头的三维定位。
5、进一步的,所述超声探头在第i帧图像时的三维空间位姿pp与摄像头在第i帧图像时的三维空间位姿pc存在如下关系:其中,表示摄像头和超声探头之间的位姿变换矩阵。
6、进一步的,所述摄像头在第i帧图像时的三维空间位姿pp=miow1,其中,mi表示摄像头第i帧图像和摄像头第1帧图像之间的位姿变换矩阵,ow1表示摄像头第1帧图像所对应的的世界坐标。
7、进一步的,所述摄像头第i帧图像和摄像头第1帧图像之间的位姿变换矩阵其中,表示摄像头第i帧图像和摄像头第i-1帧图像之间的位姿变换矩阵;表示摄像头第i-1帧图像和摄像头第i-2帧图像之间的位姿变换矩阵。
8、进一步的,所述摄像头第i帧图像和摄像头第i-1帧图像之间的位姿变换矩阵的计算方法包括:提取摄像头第i帧图像和摄像头第i-1帧图像中的图像特征信息,通过对图像特征点进行匹配,计算出摄像头第i帧图像和摄像头第i-1帧图像之间的位姿变换矩阵
9、进一步的,采用orb特征提取算法提取摄像头第i帧图像和摄像头第i-1帧图像中的图像特征信息;采用迭代最近点方法计算出摄像头第i帧图像和摄像头第i-1帧图像之间的位姿变换矩阵
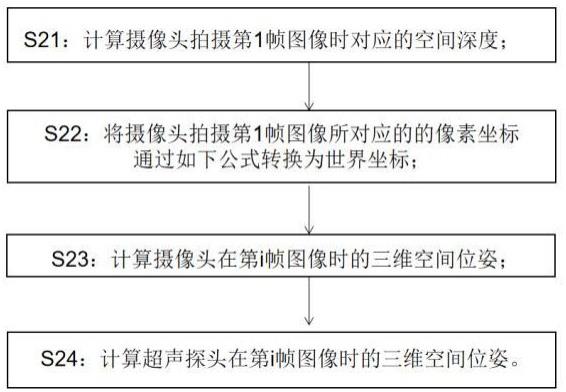
10、进一步的,所述摄像头第1帧图像所对应的的世界坐标ow1的获取方法包括:
11、计算摄像头拍摄第1帧图像时对应的空间深度zc;
12、将摄像头拍摄第1帧图像所对应的的像素坐标转换为世界坐标。
13、进一步的,所述摄像头拍摄第1帧图像所对应的的像素坐标通过如下公式转换为世界坐标:
14、
15、其中,(u,v)表示摄像头拍摄的第1帧图像在像素坐标系中对应的像素坐标;(xw,yw,zw)表示摄像头拍摄的第1帧图像在世界坐标系中对应的世界坐标;k表示摄像头的相机参数矩阵;表示摄像头相机坐标系与世界坐标系之间的位姿变换矩阵。
16、进一步的,所述摄像头拍摄第1帧图像时,世界坐标系与相机坐标系重合。
17、进一步的,所述摄像头为单目摄像头或双目摄像头。
18、本申请实施例提供的上述技术方案与现有技术相比具有如下优点:本申请中摄像头与超声探头固定连接且保持同步移动,通过摄像头拍摄的图像可以计算出摄像头的三维空间位姿,由于摄像头和超声探头相对保持不动且运动轨迹同步,根据二者之间的相对位置关系即可获取超声探头的三维空间位姿,根据超声探头的三维空间位姿即可获取在不同时刻超声探头的位置,即实现了超声探头的空间定位,同时还能实现二位超声图像的三维重建;本申请方法无需依靠其他外部辅助定位设备,可以显著降低超声探头三维定位系统的复杂度,降低系统搭建和使用成本,扩大超声三维定位系统的使用场景,提高系统的便携性和易用性。
技术特征:
1.一种超声探头三维定位方法,其特征在于,包括:
2.根据权利要求1所述的一种超声探头三维定位方法,其特征在于,所述超声探头在第i帧图像时的三维空间位姿pp与摄像头在第i帧图像时的三维空间位姿pc存在如下关系:其中,表示摄像头和超声探头之间的位姿变换矩阵。
3.根据权利要求1所述的一种超声探头三维定位方法,其特征在于,所述摄像头在第i帧图像时的三维空间位姿pp=miow1,其中,mi表示摄像头第i帧图像和摄像头第1帧图像之间的位姿变换矩阵,ow1表示摄像头第1帧图像所对应的世界坐标。
4.根据权利要求3所述的一种超声探头三维定位方法,其特征在于,所述摄像头第i帧图像和摄像头第1帧图像之间的位姿变换矩阵其中,表示摄像头第i帧图像和摄像头第i-1帧图像之间的位姿变换矩阵;表示摄像头第i-1帧图像和摄像头第i-2帧图像之间的位姿变换矩阵。
5.根据权利要求4所述的一种超声探头三维定位方法,其特征在于,所述摄像头第i帧图像和摄像头第i-1帧图像之间的位姿变换矩阵mii-1的计算方法包括:提取摄像头第i帧图像和摄像头第i-1帧图像中的图像特征信息,通过对图像特征点进行匹配,计算出摄像头第i帧图像和摄像头第i-1帧图像之间的位姿变换矩阵
6.根据权利要求5所述的一种超声探头三维定位方法,其特征在于,采用orb特征提取算法提取摄像头第i帧图像和摄像头第i-1帧图像中的图像特征信息;
7.根据权利要求3所述的一种超声探头三维定位方法,其特征在于,所述摄像头第1帧图像所对应的世界坐标ow1的获取方法包括:
8.根据权利要求7所述的一种超声探头三维定位方法,其特征在于,所述摄像头拍摄第1帧图像所对应的像素坐标通过如下公式转换为世界坐标:
9.根据权利要求7所述的一种超声探头三维定位方法,其特征在于,所述摄像头拍摄第1帧图像时,世界坐标系与相机坐标系重合。
10.根据权利要求1所述的一种超声探头三维定位方法,其特征在于,所述摄像头为单目摄像头或双目摄像头。
技术总结
本发明公开了一种超声探头三维定位方法,包括:摄像头与超声探头固定连接且保持同步移动;根据所述摄像头和超声探头之间的位置关系,将所述摄像头对应的三维空间位姿转换为相同时刻下超声探头对应的三维空间位姿,利用超声探头对应的三维空间位姿实现对超声探头的三维定位。本发明提供的一种超声探头三维定位方法,利用与超声探头固定且同步移动的摄像头来获取超声探头的三维空间位姿,可以显著降低超声探头三维定位系统的复杂度,降低系统搭建和使用成本,扩大超声三维定位系统的使用场景,提高系统的便携性和易用性。
技术研发人员:张波,许戎戎,谢恒,张养华
受保护的技术使用者:中日友好医院(中日友好临床医学研究所)
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!