一种智能手康复机器人
本发明涉及智能康复器械,更具体的说是涉及一种智能手康复机器人。
背景技术:
1、手作为我们日常生活中使用最多的身体部位,容易出现各种各样的手功能障碍,特别是近年来,脑卒中患者数量增加,车祸后损伤、神经压迫等导致的手部功能障碍患者也不断增加,手部功能障碍患者数量愈来愈大,成为不可忽视的一大难题。
2、其中镜像疗法作为一种成本低廉、操作简便的康复治疗方法逐渐被应用于临床,是利用特定康复训练结合平面镜而形成的一种康复治疗手段,单纯镜像疗法不仅可改善脑中患者的上肢及手功能,对日常生活活动能力的提高也有作用,研究显示,镜像疗法与其他治疗联合应用不仅能提高肢体功能及日常活动能力,还能改善患者疼痛以及焦虑、抑郁程度。
3、目前,随着我国治疗技术发展,康复机器人的出现开始逐渐代替一部分康复治疗师的体力工作,其主要是指在康复医疗中用于测评训练与治疗,能够帮助患者加快身体机能恢复、降低复发率、减少并发症的医疗器具,随着康复训练机器人技术的发展,康复训练机器人在康复过程中承担起越来越多的任务。
4、但是,传统手部康复机器人多为刚性外骨骼式,存在着体积大、不便携带质量重、自适应性差及存在刚性冲击等缺点。
5、因此,提供一种精准便捷的智能手康复机器人是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种智能手康复机器人,使用方便快捷,便于携带,且与人手的贴合度高,运动的精准性提高。
2、为了实现上述目的,本发明采用如下技术方案:
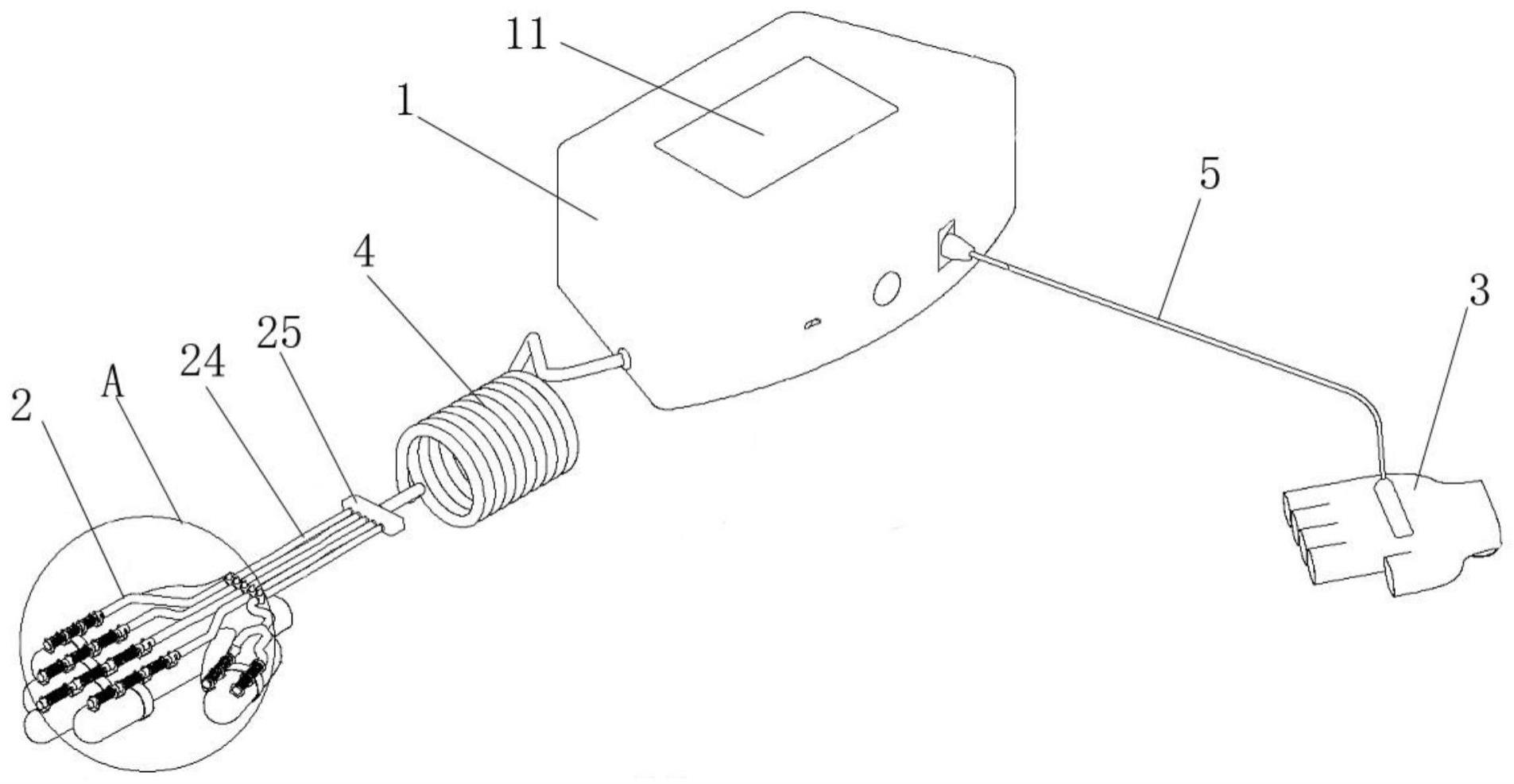
3、一种智能手康复机器人,包括工控机,还包括患侧手套、健康手套和多个角度传感器,所述患侧手套通过螺旋软管与所述工控机内部的气泵连接相通;多个所述角度传感器分别安装在所述健康手套的多个关节部位;多个所述角度传感器均与所述工控机电性连接,所述工控机与所述气泵电性连接。
4、通过采取以上方案,本发明的有益效果是:
5、角度传感器能捕捉健康手套上各手指关节的屈曲角度及自然运动规律,以电信号形式传入工控机,工控机传出气泵信号,配合气控阀门,进而控制对应患侧手套的工作状态,使用方便快捷,便于携带,且与人手的贴合度高,运动的精准性提高。
6、进一步的,所述患侧手套包括患侧手套本体、四个第一气管、y形连管、五个第二气管和汇总连接件,所述患侧手套本体每个手指部位均套设有手指套并通过束缚带固定;每个所述手指套上均具有纵向缝;每个所述手指套及所述患侧手套本体手指部位上均通过固定座安装有柔性伸缩管;四个所述第一气管和所述y形连管一端分别与所述柔性伸缩管连接相通,四个所述第一气管和所述y形连管另一端分别与五个所述第二气管一端连接相通,且所述第一气管与所述第二气管之间,以及所述y形连管与所述第二气管之间均安装有扭动阀门;五个所述第二气管另一端通过所述汇总连接件与所述螺旋软管连接相通。
7、进一步的,所述柔性伸缩管分别为并排型柔性伸缩管和四个第一直线型柔性伸缩管,所述并排型柔性伸缩管包括两个并排分布的第二直线型柔性伸缩管;两个所述第二直线型柔性伸缩管分别通过所述固定座安装在所述患侧手套本体大拇指部位上;两个所述第二直线型柔性伸缩管通过所述y形连管与其中一个所述第二气管连接相通;四个所述第一直线型柔性伸缩管分别通过四个所述第一气管与另外四个所述第二气管连接相通。
8、进一步的,所述患侧手套本体虎口部位通过魔术贴安装有加固带。
9、进一步的,所述健康手套包括健康手套本体和开关按钮,所述健康手套本体的每个手指部位均安装有所述开关按钮,所述开关按钮通过电线与所述工控机的接口电性连接。
10、进一步的,所述健康手套本体内表面设有多个均匀排布的凸点。
11、采用上述进一步的技术方案产生的有益效果为,对穴位进行刺激,可以使患者手部血液循环加快、代谢加快,从而促进手部康复药膏更好的吸收药效,提高其广泛适用性。
12、进一步的,所述工控机上嵌合安装有与其电性连接的控制屏。
13、由此可知,本发明提供了一种智能手康复机器人,与现有技术相比,具有如下有益效果:
14、操作简便快捷,佩戴舒适且牢固;小巧轻便,收纳方便;可根据患侧实际情况自主调节的高效针对性康复按摩,进行智能化控制、多角度调节和精准控制,康复效果更佳。
技术特征:
1.一种智能手康复机器人,包括工控机,其特征在于,还包括患侧手套、健康手套和多个角度传感器,所述患侧手套通过螺旋软管与所述工控机内部的气泵连接相通;多个所述角度传感器分别安装在所述健康手套的多个关节部位;多个所述角度传感器均与所述工控机电性连接,所述工控机与所述气泵电性连接。
2.根据权利要求1所述的一种智能手康复机器人,其特征在于,所述患侧手套包括患侧手套本体、四个第一气管、y形连管、五个第二气管和汇总连接件,所述患侧手套本体每个手指部位均套设有手指套并通过束缚带固定;每个所述手指套上均具有纵向缝;每个所述手指套及所述患侧手套本体手指部位上均通过固定座安装有柔性伸缩管;四个所述第一气管和所述y形连管一端分别与所述柔性伸缩管连接相通,四个所述第一气管和所述y形连管另一端分别与五个所述第二气管一端连接相通,且所述第一气管与所述第二气管之间,以及所述y形连管与所述第二气管之间均安装有扭动阀门;五个所述第二气管另一端通过所述汇总连接件与所述螺旋软管连接相通。
3.根据权利要求2所述的一种智能手康复机器人,其特征在于,所述柔性伸缩管分别为并排型柔性伸缩管和四个第一直线型柔性伸缩管,所述并排型柔性伸缩管包括两个并排分布的第二直线型柔性伸缩管;两个所述第二直线型柔性伸缩管分别通过所述固定座安装在所述患侧手套本体大拇指部位上;两个所述第二直线型柔性伸缩管通过所述y形连管与其中一个所述第二气管连接相通;四个所述第一直线型柔性伸缩管分别通过四个所述第一气管与另外四个所述第二气管连接相通。
4.根据权利要求2或3所述的一种智能手康复机器人,其特征在于,所述患侧手套本体虎口部位通过魔术贴安装有加固带。
5.根据权利要求4所述的一种智能手康复机器人,其特征在于,所述健康手套包括健康手套本体和开关按钮,所述健康手套本体的每个手指部位均安装有所述开关按钮,所述开关按钮通过电线与所述工控机的接口电性连接。
6.根据权利要求5所述的一种智能手康复机器人,其特征在于,所述健康手套本体内表面设有多个均匀排布的凸点。
7.根据权利要求1所述的一种智能手康复机器人,其特征在于,所述工控机上嵌合安装有与其电性连接的控制屏。
技术总结
本发明公开了一种智能手康复机器人,包括工控机、患侧手套、健康手套和多个角度传感器,患侧手套通过螺旋软管与工控机内部的气泵连接相通;多个角度传感器分别安装在健康手套的多个关节部位;多个角度传感器均与工控机电性连接,工控机与气泵电性连接。本发明患者使用时仅需带上健康手套进行手部运动,通过弯曲传感器传递信息,就可以精确控制对应的患侧手套的工作状态,随心所欲地改变训练节奏,并通过气泵控制训练的时长和间隔进行有针对性的高效康复训练,操作简便快捷,佩戴舒适且牢固;小巧轻便,收纳方便;可根据患侧实际情况自主调节的高效针对性康复按摩,进行智能化控制、多角度调节和精准控制,康复效果更佳。
技术研发人员:张家赫,陈占科,陈睿,白旭文,刘轩志,李勇贤,王晨好,王涛,方冉,郭润泽,段欣彤,刘文畅
受保护的技术使用者:河南中医药大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!