用于手术器械的操纵装置和手术器械
本公开涉及医疗器械相关,更具体地,涉及一种用于手术器械的操纵装置和手术器械。
背景技术:
1、随着科技进步,微创外科手术得到迅速发展,并在实践中得到非常好的手术效果。外科手术机器人目前已经被广泛运用。手术机器人系统通常包括:主端控制设备和从端执行设备。手术臂一般作为从端执行部件。
2、手术机器人是一种用于执行手术任务的机器人系统,可具有多个手术臂和手术终端,可以通过远程控制或预设程序执行各种手术操作。多孔手术机器人在使用过程中,需要根据不同的手术操作使手术臂驱动手术终端产生直线往复运动。在传统手术臂设计过程中,一般通过丝杠螺母机构驱动手术终端进行直线运动,主要由于丝杠螺母机构的结构简单稳定,技术成熟。
3、但随着手术难度的提升,丝杠螺母机构的布置容易使手术臂的体积较大,降低了手术过程中的灵活性,难以适应需要多个手术臂配合操作的手术。
技术实现思路
1、鉴于上述问题,本公开提供了一种用于手术器械的操纵装置和手术器械,能够驱动手术终端产生直线往复运动,且降低了设备体积,适用性更广,操作更灵活。
2、为了实现上述目的,作为本公开提供一种用于手术器械的操纵装置,包括:底座;支撑架,安装在上述底座上;移动架,在其长度方向上可移动地安装在上述底座上,并被构造成支撑手术终端;驱动机构,安装在上述支撑架上,包括在沿上述长度方向延伸的驱动轴的驱动下转动的驱动轮;以及传动机构,包括牵引丝,上述牵引丝被构造成在上述驱动轮的驱动下牵引上述移动架在上述底座上沿上述长度方向往复直线移动。
3、在一种示意性的实施例中上述牵引丝包括:第一牵引丝,被构造成牵引上述移动架朝向上述驱动轮移动;以及第二牵引丝,被构造成牵引上述移动架远离上述驱动轮移动;上述传动机构还包括:两组传动轮组,靠近上述驱动轮设置,并被构造成将在上述驱动轮的径向方向上引出的上述牵引丝转换成在上述长度方向上延伸;以及换向轮,安装在上述支撑架上,并位于上述移动架的与上述传动轮组相对的一侧,并被构造成将从上述传动轮组穿过上述移动架延伸的第二牵引丝引导至上述移动架,使得上述第一牵引丝和第二牵引丝共同牵引上述移动架往复直线移动。
4、在一种示意性的实施例中,上述第一牵引丝的固定端与上述驱动轮固定连接后缠绕于上述驱动轮上,缠出后经过一组上述传动轮组,使上述第一牵引丝的连接端连接至上述移动架的面向上述驱动轮的第一侧;上述第二牵引丝的固定端与上述驱动轮固定连接后缠绕与上述驱动轮上,缠出后经过另一组上述传动轮组,再经过上述换向轮,使上述第二牵引丝的连接端连接至上述移动架的与上述第一侧相对的第二侧;上述第一牵引丝在上述驱动轮上的缠绕方向与上述第二牵引丝在上述驱动轮上的缠绕方向相反。
5、在一种示意性的实施例中,上述传动机构还包括:第一连接件,将上述第一牵引丝的连接端连接至上述移动架的第一侧,并被构造成调节上述第一牵引丝的松紧度;以及第二连接件,将上述第二牵引丝的连接端连接至上述移动架的第二侧,并被构造成调节上述第二牵引丝的松紧度。
6、在一种示意性的实施例中,第一连接件和第二连接件中的每一个包括:
7、第一连接座,上述第一牵引丝或者第二牵引丝的连接端连接至上述第一连接座的第一端;第一螺杆,固定在上述第一连接座的与第一端相对的第二端;第二连接座,上述第二连接座的第一端与上述第一螺杆螺纹连接;第二螺杆,固定在上述第二连接座的与第一端相对的第二端,并与上述移动架螺纹连接,使得上述第一牵引丝或者第二牵引丝响应于上述第二连接座相对于上述移动架的转动拉紧或者松弛。
8、在一种示意性的实施例中,每组上述传动轮组包括:第一导向轮,上述第一导向轮的第一转轴平行于上述长度方向,以在与上述长度方向垂直的径向方向上引导上述牵引丝;第二导向轮,上述第二导向轮的第二转轴垂直于上述长度方向,并且上述第二导向轮被设置成使得从上述第一导向轮引出的上述牵引丝与上述第二导向轮相切,以接收从上述第一导向轮引出的上述牵引丝并在上述长度方向上进一步引导上述牵引丝。
9、在一种示意性的实施例中,上述驱动轮设有沿长度方向上间隔分布的两组驱动部;上述传动机构设有两组,两组上述传动机构上述的牵引丝分别从两组上述驱动部引出,并且两组上述传动机构的牵引丝以在横向方向上间隔分布的方式连接至上述移动架;上述长度方向、上述横向方向和竖直方向两两垂直。
10、在一种示意性的实施例中,上述支撑架包括第一支撑架以及沿上述长度方向间隔分布的第二支撑架和第三支撑架;上述换向轮安装在上述第一支撑架上;上述第二支撑架和上述第三支撑架之间设有四个沿上述长度方向延伸且适用于支撑两组上述传动机构的四个上述第一导向轮的连接轴;其中一组上述传动机构上述对应的两个上述连接轴在上述竖直方向上的位置与另一组上述传动机构上述对应的两个上述连接轴在上述竖直方向上的位置相应的错开;上述第三支撑架上设有三个朝上述第二支撑架凸起的定位板,相邻的两个上述定位板在上述横向方向上间隔分布;每组上述传动机构上述所包括的两个上述第二导向轮的转轴对应的安装于其中两个上述定位板之间。
11、在一种示意性的实施例中,上述底座上设置有滑轨,上述移动架上设置有与上述滑轨沿上述长度方向滑动配合的滑块。
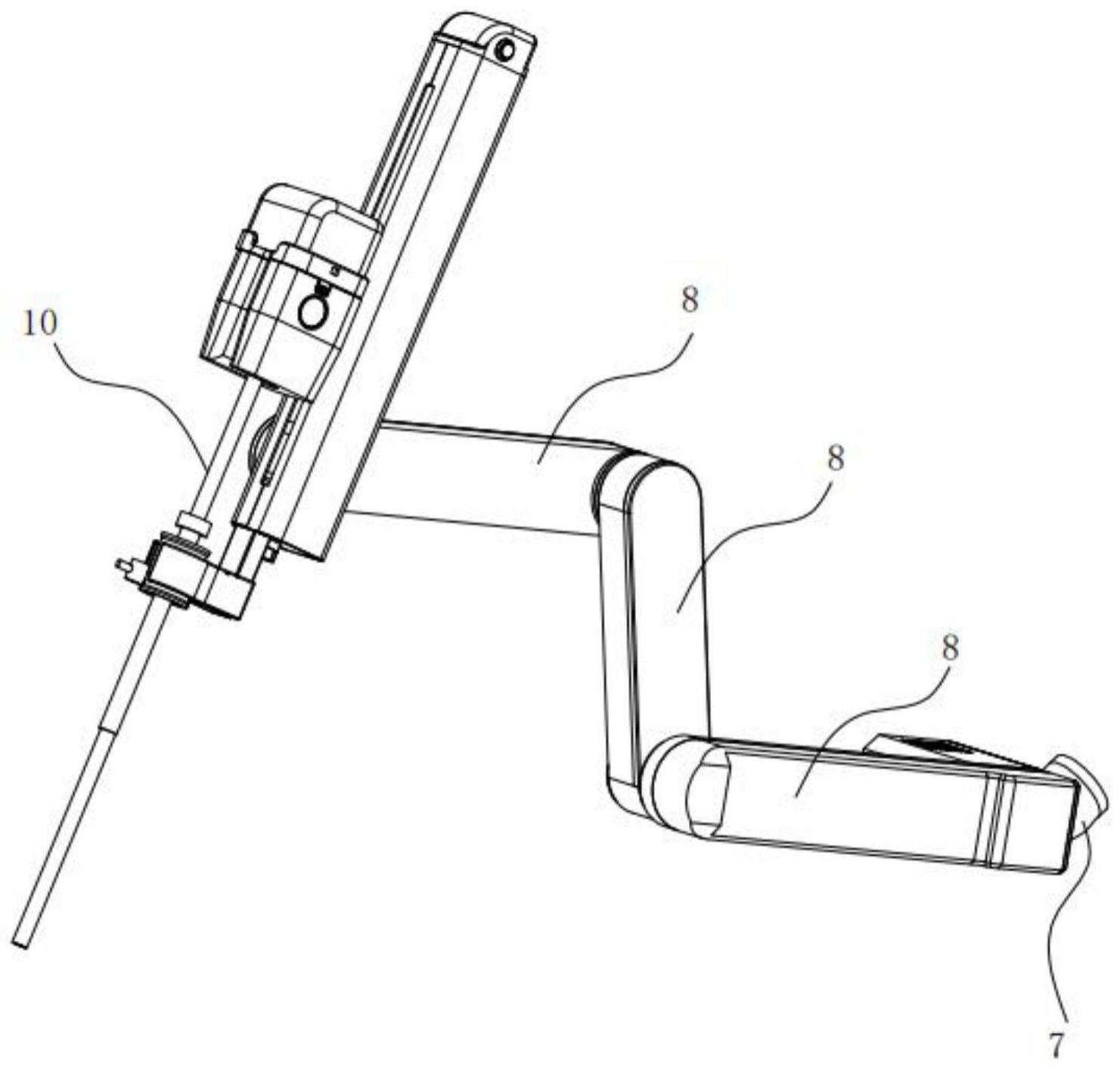
12、本公开还提供了一种手术器械,包括安装座;连接机构,包括多个连接臂,相邻的两个上述连接臂之间彼此可转动地结合,上述连接机构的一端可转动地连接至上述安装座;如上述任一项实施例中的操纵装置,上述连接机构的另一端可转动地连接至上述操纵装置的底座;以及手术终端,安装在上述操纵装置上,并被构造成随上述操纵装置的上述移动架往复直线移动。
13、通过驱动轮顺时针或逆时针转动,驱动牵引丝,使牵引丝能够牵引移动架在底座上往复直线移动;同时,支撑架的上部用于连接手术终端,以达到操纵手术终端沿直线往复移动的目的,驱动轮和牵引丝布置更简单,占用体积小,使得整个操纵装置在手术过程中配合其他部件移动时更灵活。
技术特征:
1.一种用于手术器械的操纵装置,包括:
2.根据权利要求1所述的操纵装置,其特征在于,所述牵引丝包括:
3.根据权利要求2所述的操纵装置,其特征在于,所述第一牵引丝(51)的固定端与所述驱动轮(41)固定连接后缠绕于所述驱动轮(41)上,缠出后经过一组所述传动轮组,使所述第一牵引丝(51)的连接端连接至所述移动架(3)的面向所述驱动轮(41)的第一侧;
4.根据权利要求2所述的操纵装置,其特征在于,所述传动机构(5)还包括:
5.根据权利要求4所述的操纵装置,其特征在于,第一连接件(61)和第二连接件(62)中的每一个包括:
6.根据权利要求2所述的操纵装置,其特征在于,每组所述传动轮组包括:
7.根据权利要求6所述的操纵装置,其特征在于,所述驱动轮(41)设有沿长度方向上间隔分布的两组驱动部;
8.根据权利要求7所述的操纵装置,其特征在于,所述支撑架(2)包括第一支撑架(21)以及沿所述长度方向间隔分布的第二支撑架(22)和第三支撑架(23);
9.根据权利要求1所述的操纵装置,其特征在于,所述底座(1)上设置有滑轨,所述移动架(3)上设置有与所述滑轨沿所述长度方向滑动配合的滑块。
10.一种手术器械,包括:
技术总结
本公开涉及医疗器械相关技术领域,具体公开了一种用于手术器械的操纵装置和手术器械,包括底座、安装在底座上的支撑架、移动架、驱动机构和传动机构,移动架在其长度方向上可移动地安装在底座上,用于支撑手术终端;驱动机构安装在支撑架上,包括驱动轮,驱动轮能够在沿长度方向延伸的驱动轴的驱动下沿顺时针或逆时针转动;传动机构包括牵引丝,牵引丝能够在驱动轮的驱动下牵引移动架在底座上沿长度方向往复直线移动。
技术研发人员:李进华,郭经彪,王树新,程天天
受保护的技术使用者:天津大学医疗机器人与智能系统研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!