外科器械和包括该外科器械的外科设备的制作方法
本发明属于医疗器械领域,具体是外科器械和包括该外科器械的外科设备。
背景技术:
1、达芬奇外科手术系统是一种高级机器人平台,其设计的理念是通过使用微创的方法,实施复杂的外科手术。达芬奇机器人由三部分组成:外科医生控制台、床旁机械臂系统、成像系统,床旁机械臂系统是外科手术机器人的操作部件,其主要功能是为器械臂和摄像臂提供支撑,助手医生在无菌区内的床旁机械臂系统边工作,负责更换器械和内窥镜,协助主刀医生完成手术,为了确保患者安全,助手医生比主刀医生对于床旁机械臂系统的运动具有更高优先控制权。
2、现有技术中,达芬奇机器人通常为四只机械臂,分别为能够夹取、止血和切割,但达芬奇机器人需要助手医生配合进行手术操作,诸如吸液和缝合等操作时,通常为夹取臂夹持吸液管和缝合针等工具进行操作,机械臂需探出手术创口,由助手医生进行器材递接,不但增加了助手医生工作量,且探出手术创口后容易造成细菌污染。此外一只前端机械臂目前仅能够使用10次,主要原因是消毒时会将前端机械臂放入高温高压环境消毒,否者其复杂结构容易藏纳细菌,但容易使前端机械臂产生精度损坏,当机械臂被细菌污染后进行高温高压消毒后,相当于额外消耗了使用次数,目前一些手术手术中甚至一次会消耗6-7次使用次数,这使使用成本更为巨大,使机器人手术的性价比大幅降低。
技术实现思路
1、为了解决现有技术中部分操作需要助手医生进行器材递接的问题,本发明的目的是提供外科器械和包括该外科器械的外科设备,减少助手医生在手术中的工作量。
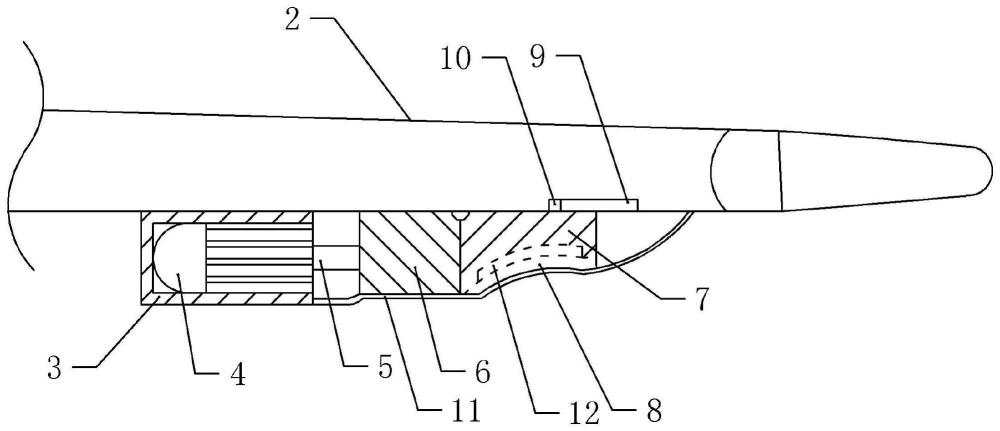
2、为了实现上述目的,本发明的技术方案如下:外科器械和包括该外科器械的外科设备,包括手术机器人,手术机器人设有若干夹持臂,手术机器人的夹持臂靠近夹持臂的夹钳的一端固定安装有递接组件;
3、递接组件包括壳体,壳体为一端开口的圆筒形结构,壳体内设有微型电机,微型电机的输出轴固定连接有丝杠,丝杠上套设有推块,推块与丝杠滑动连接,推块远离微型电机的一端转动连接有固定块,固定块远离夹持臂一侧设有器材卡槽,固定块靠近夹持臂一侧与夹持臂通过滑槽滑动连接,固定块上设有与滑槽配合的滑块,滑块位于固定块五分之一处,滑槽长度为固定块长度的五分之四。
4、采用上述方案后实现了以下有益效果:先将递接组件与手术器材进行消毒处理,再将手术器材卡合于器材卡槽上,手术时递接组件能够与夹持臂一同进入手术创口内。当需要进行夹持器材操作时,微型电机启动,带动丝杠转动,使推块向夹持臂的夹钳方向移动。推块移动时会带动固定块在滑槽上滑动,滑块滑至滑槽末端时,此时固定块无法继续滑动,固定块与推块转动连接,在推块的作用下固定块会倾斜,此时器材卡槽上的手术器材会跟随固定块倾斜,使手术器材一端挪移到夹持臂的夹钳中部。例如吸液等操作时,此时便能够直接使洗液头对准积液进行吸取。
5、当例如缝合和支撑等复杂操作时,夹持臂的夹钳将手术器材夹持住,此时微型电机反向旋转,带动固定块回缩,使手术器材从固定块上脱落。夹持臂能够夹持手术器材进行复杂操作。当操作完成后,使用其他夹持臂将手术器材重新卡合于固定块上,对装置进行收纳,使夹持臂恢复夹持能力。
6、与现有技术相比,减少了助手医生在手术中的工作量,同时减少了递接操作,使从之前的退出手术创口、夹取手术器材、进入手术创口、手术操作、退出手术创口、取下器材和探入手术创口这些步骤进行大幅去除,使手术速度得到大幅提升;同时夹持臂在手术过程中一直保持在手术创口内,其被污染的概率大幅降低,污染的概率大幅降低后,使手术过程中无需额外消毒,夹持臂的使用次数得到保证,极大节约了手术成本,同时由于现有技术中手术创口至少能够供夹持臂夹持手术器材通过,递接组件组件固定手术器材时是接近于贴合夹持臂,其倾斜角度很小,减少手术器材通过时所需的横截面积,因此夹持臂上增加递接组件也不会需要更大的手术创口。
7、进一步,壳体开口处设有套膜,推块、固定块和滑槽均被套膜包裹,套膜包裹为耐高温弹性材料制成。
8、有益效果:推块和固定块转动连接处、微型电机和滑槽均容易藏污纳垢,夹持臂的夹持部需要提供四个自由度的移动同时需要保持体积微小,其结构较为复杂,夹持臂的夹持部由于其复杂的结构难以套设薄膜进行保护,而递接组件结构简单因此套膜不会干扰其功能。套膜能够保护递接组件,在手术时,血液和体液等液体不会进入其机构内部,其后产生的细菌与病毒仅会滋生于套膜表面,使其更容易完全消毒灭菌,且不会影响递接组件的功能。
9、进一步,器材卡槽底部设有磁力件。
10、有益效果:磁力件在将手术器材卡合于器材卡槽使能够提供一个牵引力,使医生能够更好对准卡合部位,同时能够对器材进行吸引,使其更不容易脱落。
11、进一步,器材卡槽上设有仅能将器材从器材卡槽两端插入或取出的固定扣。
12、有益效果:大部分器材均为长条状,且器材取出时是将器材从器材卡槽一端中抽出。固定扣能够加强对器材的固定,使器材在患者创口内碰撞而掉落的概率降低,同时不影响器材取出速度。
13、进一步,包括缝合圆针固定座,缝合圆针固定座与器材卡槽卡合,缝合圆针固定座一端设有若干与缝合圆针针体卡合的放置槽。
14、有益效果:微创手术手术创口较小,因此缝合时通常使用缝合圆针。但缝合圆针不是长条状,难以固定与器材卡槽上。因此使用缝合圆针固定座对缝合圆针圆针进行固定,再将缝合圆针固定座卡合于器材卡槽上。使用时利用夹持臂夹持住缝合圆针,随后微型电机反转带动固定块和缝合圆针固定座收回,缝合圆针便脱离至夹持臂上。方便医生使用缝合圆针进行缝合。
15、进一步,缝合圆针固定座上设有挡板,挡板位于缝合圆针固定座靠近夹持臂的一侧。
16、有益效果:缝合圆针的针尖容易将套膜划破,因此在缝合圆针固定座上设有挡板,将缝合圆针的针尖与夹持臂分隔,减少缝合圆针的针尖将套膜划破的概率。
17、进一步,手术机器人设有金属探测器,手术机器人设有安全探测模块;
18、安全探测模块用于识别手术创口内的金属部件,识别到金属部件后,将金属部件在手术机器人的成像显示屏上标记。
19、有益效果:人工手术中会出现手术器材遗留在患者体内的情况,手术机器人提供的视野更小,更容易发生手术器材遗留的情况,安全探测模块能够探测到手术创口中的金属件,手术缝合时主刀医生需要确定患者体内金属件情况,对患者体内金属件位置进行确定,降低手术器材遗留在患者体内的概率。
20、进一步,夹持臂上固定连接有若干管道固定扣。
21、有益效果:例如吸液等操作时,引流管也会跟随夹持臂进入手术创口中。管道固定扣能够将引流管固定在夹持臂上,减少引流管晃动对手术的影响。
技术特征:
1.外科器械和包括该外科器械的外科设备,其特征在于:包括手术机器人,手术机器人设有若干夹持臂,手术机器人的夹持臂靠近夹持臂的夹钳的一端固定连接有递接组件;
2.根据权利要求1所述的外科器械和包括该外科器械的外科设备,其特征在于:壳体开口处设有套膜,推块、固定块和滑槽均被套膜包裹,套膜包裹为耐高温弹性材料制成。
3.根据权利要求2所述的外科器械和包括该外科器械的外科设备,其特征在于:器材卡槽底部设有磁力件。
4.根据权利要求3所述的外科器械和包括该外科器械的外科设备,其特征在于:卡槽上设有仅能将器材从卡槽两端插入或取出的固定扣。
5.根据权利要求4所述的外科器械和包括该外科器械的外科设备,其特征在于:包括缝合圆针固定座,缝合圆针固定座与器材卡槽卡合,缝合圆针固定座一端设有若干与缝合圆针针体卡合的放置槽。
6.根据权利要求5所述的外科器械和包括该外科器械的外科设备,其特征在于:缝合圆针固定座上设有挡板,挡板位于缝合圆针固定座靠近夹持臂的一侧。
7.根据权利要求6所述的外科器械和包括该外科器械的外科设备,其特征在于:手术机器人设有金属探测器,手术机器人设有安全探测模块;
8.根据权利要求7所述的外科器械和包括该外科器械的外科设备,其特征在于:夹持臂上固定连接有若干管道固定扣。
技术总结
本发明公开了医疗器械领域的外科器械和包括该外科器械的外科设备,包括手术机器人,手术机器人设有若干夹持臂,手术机器人的夹持臂靠近夹持臂的夹钳的一端固定连接有递接组件;递接组件包括壳体,壳体为一端开口的圆筒形结构,壳体内设有微型电机,微型电机的输出轴固定连接有丝杠,丝杠上套设有推块,推块与丝杠滑动连接,推块远离微型电机的一端转动连接有固定块,固定块远离夹持臂一侧设有器材卡槽,固定块靠近夹持臂一侧与夹持臂通过滑槽滑动连接,固定块上设有与滑槽配合的滑块,滑块位于固定块五分之一处,滑槽长度为固定块长度的五分之四。采用本发明的技术方案,减少助手医生在手术中的工作量。
技术研发人员:陈炜
受保护的技术使用者:福建省肿瘤医院(福建省肿瘤研究所、福建省癌症防治中心)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!