一种病区消毒机器人的制作方法
本发明涉及机器人,特别涉及病区消毒机器人。
背景技术:
1、医院病区是各种病菌的滋生之地,如何在病区内进行有效消毒是减小传染性感染的有效手段,目前的消毒多采用人工喷洒药物的方式。
2、如现有公开号为cn217510852u的中国专利,其公开了一种非洁净病区使用的消毒机器人,属于消毒机器人技术领域。该非洁净病区使用的消毒机器人包括移动装置、消毒机构和防护结构。所述移动装置包括移动机器人本体和箱体,所述箱体固定在所述移动机器人本体的顶面,所述消毒机构包括升降组件、喷管和第二紫外线杀菌灯,所述升降组件安装固定在所述箱体的内部,所述腔体固定在所述料桶的顶面,所述喷管的表面连通固定有连接管,两个所述环形板滑动连接在所述箱体的外表面,所述第一挡板固定在两个所述环形板的外表面,所述第一挡板与第一挡板之间固定有缓冲件。本实用新型在发生碰撞的过程中可以对受力进行缓冲,提高防护效果从而降低消毒机器人发生损坏。
3、再如现有公开号为cn217728751u的中国专利,其公开了一种具有自动喷洒消毒功能的协运机器人,包括协运机器人本体和自动喷洒消毒模块,自动喷洒消毒模块设置在行李舱内,自动喷洒消毒模块上的第二电气快接总成与协运机器人本体上的第一电气快接总成连接,自动喷洒消毒模块上的第二水路快接总成与协运机器人本体上的第一水路快接总成连接。本实用新型的协运机器人在行李舱内放置自动喷洒消毒模块,可实现巡航或定时定点自动消毒喷洒作业,甚至对人流密集场所及疫情高风险区域进行7*24小时不间断消毒作业,形成自动消毒的工作闭环,可用于机场口岸或其它公共区域或发热门诊、隔离病区、定点医院、icu、手术中心等院内各个场景下的环境自主杀毒和移动自主消毒。
4、上述的专利分别具有一定的优点,但是都存在着一些缺点,如:其不能针对高处或消毒死角处进行有效的消毒。
技术实现思路
1、针对背景技术中提到的问题,本发明的目的是提供病区消毒机器人,以解决背景技术中提到的问题。
2、本发明的上述技术目的是通过以下技术方案得以实现的:
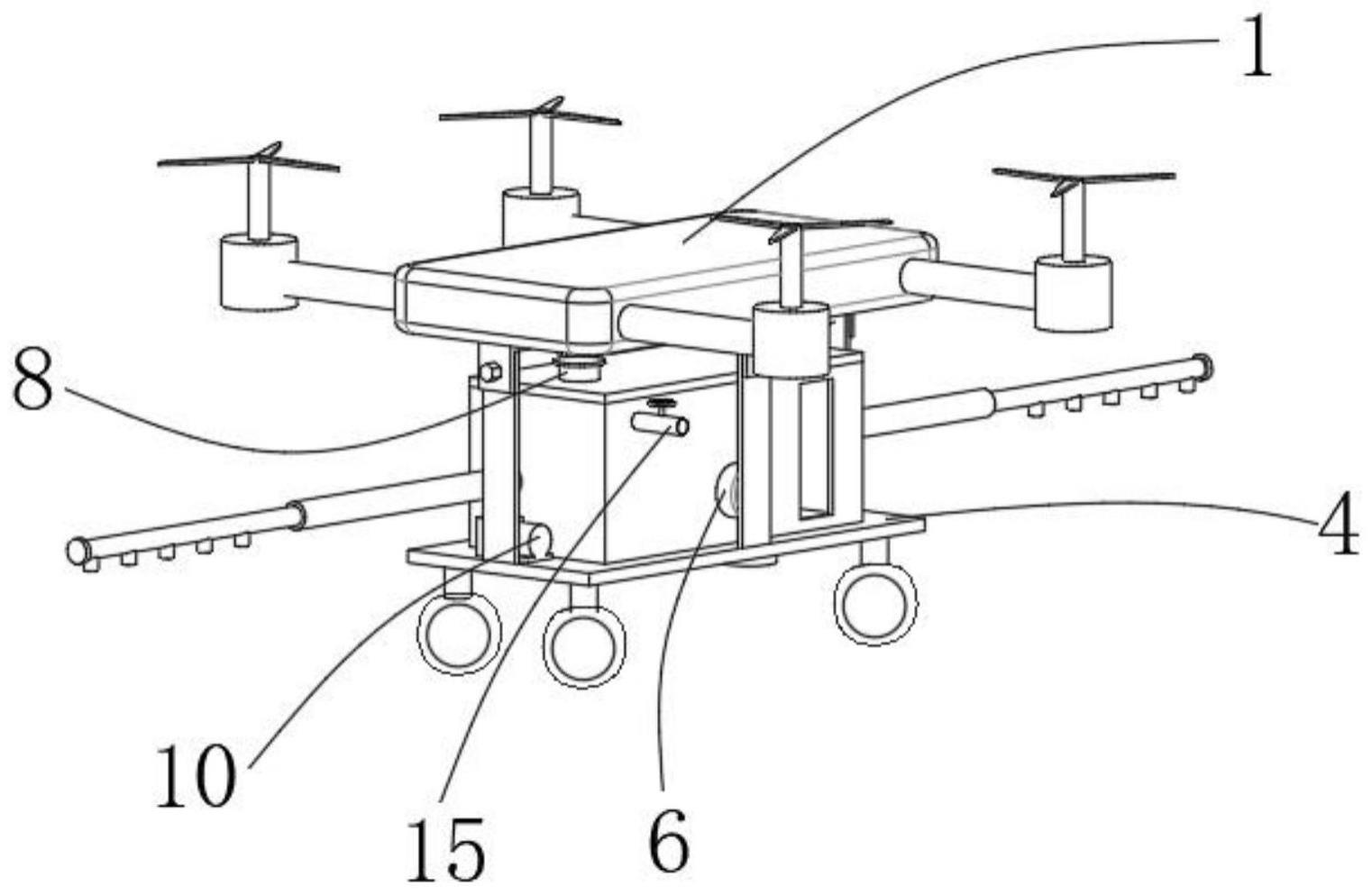
3、病区消毒机器人,包括消毒机机体,所述消毒机机体的下方设有多组对称的l型安装板,多组所述l型安装板均通过螺钉安装在所述消毒机机体的下表面上,所述l型安装板上通过螺钉固定安装有固定板,所述固定板的底端焊接有放置板,所述放置板的上表面上固定安装有消毒剂箱,所述消毒剂箱内固定安装有搅拌机构,所述搅拌机构的上方设有箱盖,所述箱盖固定在所述消毒剂箱的上表面上,所述箱盖上设有相通的加药漏斗,所述加药漏斗的上表面上安装有密封盖,所述消毒剂箱的两侧均设有输送机构,所述输送机构固定安装在所述放置板的上表面上,所述消毒剂箱上固定安装有两个对称的伸缩杆,所述伸缩杆与所述输送机构相通,所述伸缩杆上固定安装有喷头。
4、通过采用上述技术方案,通过l型安装板,便于放置板,通过固定板进行固定安装,方便安装和拆卸,有消毒剂箱上固定安装的搅拌机构,便于药物和水进行混合搅拌,提高喷药的效率,也方便在喷药的时候,防止药物沉淀,设有的加药漏斗,便于药品放置在消毒剂箱内,通过密封盖进行密封固定,设有的输送机构,提高药水的喷洒效率,通过伸缩杆,能够调节长度,便于控制消毒机器人的喷药的宽幅度,便于使用,能够对病区的各个死角达到良好的消毒效果。
5、较佳的,所述搅拌机构包括转轴、搅拌桨和伺服电机,所述转轴通过轴承转动安装在所述消毒剂箱内,所述搅拌桨固定安装在所述转轴上,所述伺服电机通过联轴器与所述转轴传动连接,所述伺服电机通过螺钉固定安装在所述消毒剂箱上。
6、通过采用上述技术方案,通过伺服电机带动转轴上安装的搅拌桨转动,从而对消毒剂箱里的药物和水进行充分的混合,提高药性。
7、较佳的,所述搅拌桨设有若干组,若干组所述搅拌桨上均设有流通孔。
8、通过采用上述技术方案,设有若干组所述搅拌桨,提高搅拌效率,通过流通孔,便于水的流通。
9、较佳的,所述输送机构包括水泵、第一管道和第二管道,所述第一管道的一端与所述消毒剂箱相连接,另一端所述第一管道固定在所述水泵的进水口上,所述第二管道的一端固定在所述水泵的出水口上,另一端所述第二管道与所述伸缩杆相连接。
10、通过采用上述技术方案,通过水泵,将消毒剂箱里的药水,通过第一管道吸取,在通过第二管道输送到伸缩杆内,提高喷药的效率。
11、较佳的,所述消毒剂箱的表面上设有可视窗口。
12、通过采用上述技术方案,设有的可视窗口,便于观察消毒剂箱,药物和水的混合状况。
13、较佳的,所述消毒剂箱上固定安装有相通的进水管,所述进水管上固定安装有阀门。
14、通过采用上述技术方案,通过进水管,便于水加入到消毒剂箱内,通过阀门,便于控制水的流速。
15、较佳的,所述放置板的下表面上安装有支撑腿,所述支撑腿的下表面上固定安装有行走轮。
16、通过采用上述技术方案,通过支撑腿。提高无人机的稳定性,安装的行走轮,提高无人机与地面接触时缓冲力和减震性。
17、较佳的,所述消毒机机体上设置有控制系统模块,所述控制系统模块包括红外传感器、距离传感器、雨水传感器、报警器和plc控制器,所述plc控制器的控制输入端分别与红外传感器、距离传感器、雨水传感器电性连接,所述红外传感器设置在所述消毒机机体的底部,所述距离传感器设置有多个并等角度设置在所述消毒机机体的底部,所述雨水传感器设置在所述消毒剂箱内,所述plc控制器的控制输出端与报警器电性连接。
18、较佳的,所述控制系统模块连接有视觉监视模块、视频存储模块、空气质量监测模块、充电控制模块和姿态控制模块,所述视觉监视模块与视频存储模块连接,所述空气质量监测模块用于检测空气状态,所述姿态控制模块用于控制消毒机机体1的运行姿态。
19、较佳的,所述控制系统连接有喷洒面积控制模块和喷液量控制模块,所述喷洒面积控制模块和喷液量控制模块包括喷洒操控器、喷洒检测器和喷洒电机控制器,所述喷洒控制器通过通讯模块与喷洒电机控制器通讯连接,所述喷洒检测器与喷洒操控器连接。
20、综上所述,本发明主要具有以下有益效果:
21、第一、本消毒机器人可行走可飞行,当院区处于无人状态时可飞行消毒,当院区处于有人状态时,可行走消毒;该病区消毒机器人中,通过l型安装板,便于放置板,通过固定板进行固定安装,方便安装和拆卸,有消毒剂箱上固定安装的搅拌机构,便于药物和水进行混合搅拌,提高喷药的效率,也方便在喷药的时候,防止药物沉淀;
22、第二、该病区消毒机器人中,设有的加药漏斗,便于药品放置在消毒剂箱内,通过密封盖进行密封固定,设有的输送机构,提高药水的喷洒效率,通过伸缩杆,能够调节长度,便于控制消毒机器人的喷药的宽幅度,便于使用,能够对病区的各个死角达到良好的消毒效果。
技术特征:
1.病区消毒机器人,包括消毒机机体(1),其特征在于:所述消毒机机体(1)的下方设有多组对称的l型安装板(2),多组所述l型安装板(2)均通过螺钉安装在所述消毒机机体(1)的下表面上,所述l型安装板(2)上通过螺钉固定安装有固定板(3),所述固定板(3)的底端焊接有放置板(4),所述放置板(4)的上表面上固定安装有消毒剂箱(5),所述消毒剂箱(5)内固定安装有搅拌机构(6),所述搅拌机构(6)的上方设有箱盖(7),所述箱盖(7)固定在所述消毒剂箱(5)的上表面上,所述箱盖(7)上设有相通的加药漏斗(8),所述加药漏斗(8)的上表面上安装有密封盖(9),所述消毒剂箱(5)的两侧均设有输送机构(10),所述输送机构(10)固定安装在所述放置板(4)的上表面上,所述消毒剂箱(5)上固定安装有两个对称的伸缩杆(11),所述伸缩杆(11)与所述输送机构(10)相通,所述伸缩杆(11)上固定安装有喷头(12),所述消毒机机体(1)为无人机。
2.根据权利要求1所述的病区消毒机器人,其特征在于:所述搅拌机构(6)包括转轴(61)、搅拌桨(62)和伺服电机(63),所述转轴(61)通过轴承转动安装在所述消毒剂箱(5)内,所述搅拌桨(62)固定安装在所述转轴(61)上,所述伺服电机(63)通过联轴器与所述转轴(61)传动连接,所述伺服电机(63)通过螺钉固定安装在所述消毒剂箱(5)上。
3.根据权利要求2所述的病区消毒机器人,其特征在于:所述搅拌桨(62)设有若干组,若干组所述搅拌桨(62)上均设有流通孔(13)。
4.根据权利要求1所述的病区消毒机器人,其特征在于:所述输送机构(10)包括水泵(101)、第一管道(102)和第二管道(103),所述第一管道(102)的一端与所述消毒剂箱(5)相连接,另一端所述第一管道(102)固定在所述水泵(101)的进水口上,所述第二管道(103)的一端固定在所述水泵(101)的出水口上,另一端所述第二管道(103)与所述伸缩杆(11)相连接。
5.根据权利要求1所述的病区消毒机器人,其特征在于:所述消毒剂箱(5)的表面上设有可视窗口(14)。
6.根据权利要求1所述的病区消毒机器人,其特征在于:所述消毒剂箱(5)上固定安装有相通的进水管(15),所述进水管(15)上固定安装有阀门(16)。
7.根据权利要求1所述的病区消毒机器人,其特征在于:所述放置板(4)的下表面上安装有支撑腿(17),所述支撑腿(17)的下表面上固定安装有行走轮(18)。
8.根据权利要求1所述的病区消毒机器人,其特征在于:所述消毒机机体(1)上设置有控制系统模块,所述控制系统模块包括红外传感器、距离传感器、雨水传感器、报警器和plc控制器,所述plc控制器的控制输入端分别与红外传感器、距离传感器、雨水传感器电性连接,所述红外传感器设置在所述消毒机机体(1)的底部,所述距离传感器设置有多个并等角度设置在所述消毒机机体(1)的底部,所述雨水传感器设置在所述消毒剂箱(5)内,所述plc控制器的控制输出端与报警器电性连接。
9.根据权利要求8所述的病区消毒机器人,其特征在于:所述控制系统模块连接有视觉监视模块、视频存储模块、空气质量监测模块、充电控制模块和姿态控制模块,所述视觉监视模块与视频存储模块连接,所述空气质量监测模块用于检测空气状态,所述姿态控制模块用于控制消毒机机体(1)的运行姿态。
10.根据权利要求9所述的病区消毒机器人,其特征在于:所述控制系统连接有喷洒面积控制模块和喷液量控制模块,所述喷洒面积控制模块和喷液量控制模块包括喷洒操控器、喷洒检测器和喷洒电机控制器,所述喷洒控制器通过通讯模块与喷洒电机控制器通讯连接,所述喷洒检测器与喷洒操控器连接。
技术总结
本发明公开了病区消毒机器人,其技术方案要点是:包括消毒机机体,所述消毒机机体的下方设有多组对称的L型安装板,多组所述L型安装板均通过螺钉安装在所述消毒机机体的下表面上,所述L型安装板上通过螺钉固定安装有固定板,所述固定板的底端焊接有放置板,所述放置板的上表面上固定安装有消毒剂箱,所述消毒剂箱内固定安装有搅拌机构,通过L型安装板,便于放置板,通过固定板进行固定安装,方便安装和拆卸,有消毒剂箱上固定安装的搅拌机构,便于药物和水进行混合搅拌,提高喷药的效率,也方便在喷药的时候,防止药物沉淀;本消毒机器人可行走可飞行,当院区处于无人状态时可飞行消毒,当院区处于有人状态时,可行走消毒。
技术研发人员:张朝福,王飞
受保护的技术使用者:苏州德品医疗科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!