一种末端执行器及手术机器人的制作方法
本发明具体涉及医疗用品,具体涉及一种末端执行器及手术机器人。
背景技术:
1、通过手术机器人进行穿刺手术可以有效提高穿刺手术的稳定性和精准性,手术机器人通过末端执行器夹持穿刺针,并进行穿刺进针操作。在通过手术机器人进行穿刺手术时,由于手术机器人导航系统以及零件加工组装等或多或少存在一定的误差,或者医生规划的插针角度不理想等因素,导致手术机器人驱动末端执行器按既定规划轨迹运动停止后,会出现插针角度不合适的情况。针对这种情况,现有技术中,手术机器人的末端执行器在其停止运动后不能调节插针角度,这样就需要重新再规划末端执行器的运动轨迹以调整插针角度,这需要重新再走一遍手术流程,使得手术操作较繁杂,同时还增加了手术时间。
技术实现思路
1、本发明的目的是针对现有技术中的不足,提供一种当末端执行器停止运动后能够调节插针角度的末端执行器。
2、为达到上述目的,本发明采用的技术方案是:
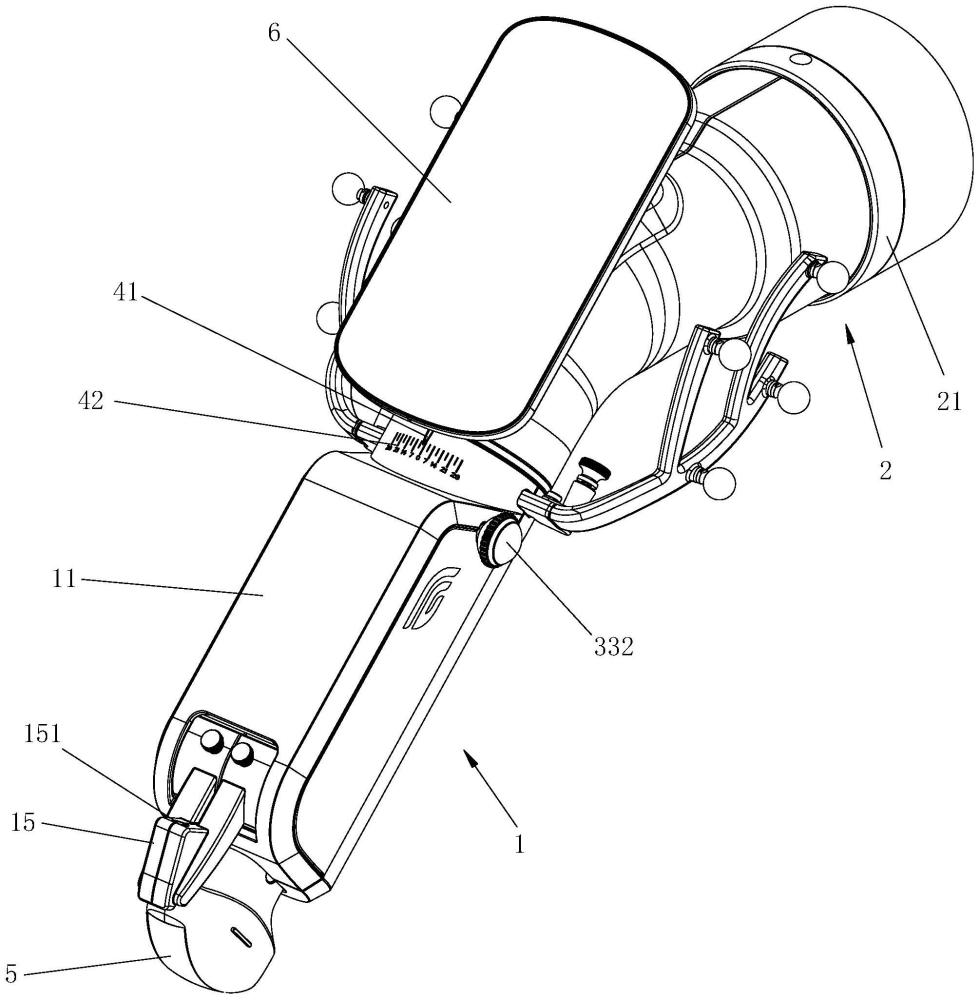
3、一种末端执行器,包括用于夹持穿刺针的末端执行器前段和用于与手术机器人的机械臂连接的末端执行器后段,所述末端执行器前段能够转动地设置在所述末端执行器后段上,所述末端执行器还包括用于驱使所述末端执行器前段相对所述末端执行器后段转动的驱动机构。
4、优选地,所述末端执行器前段包括前段支架,所述末端执行器后段包括后段支架,所述前段支架能够转动地设置在所述后段支架上,所述驱动机构包括固定设置在所述后段支架内的第一驱动件和能够转动地设置在所述前段支架内的第二驱动件,所述第一驱动件与所述第二驱动件相配合。通过第一驱动件和第二驱动件的配合,在第二驱动件转动时,利用力相互作用和运动相对静止的原理实现逆向驱动,从而驱使前段支架相对后段支架转动。
5、进一步地,所述第一驱动件上设置有第一齿轮,所述第二驱动件上设置有第二齿轮,所述第一齿轮与所述第二齿轮相啮合。在第二驱动件转动时,通过齿轮传动驱使前段支架相对后段支架转动,使得驱动机构的结构简单,工作可靠。
6、进一步地,所述驱动机构还包括设置在所述前段支架上用于驱使所述第二驱动件相对所述前段支架转动的第三驱动件,所述第三驱动件与所述第二驱动件相配合。
7、更进一步地,所述第三驱动件包括能够转动地设置在所述前段支架内的蜗杆,所述第二驱动件上还设置有蜗轮,所述蜗杆与所述蜗轮相啮合。通过蜗杆与蜗轮的啮合,在第三驱动件转动驱使第二驱动件转动的同时,还可利用蜗杆与蜗轮传动结构的自锁功能使末端执行器具有持稳功能,使末端执行器前段不易出现晃动,从而可提高插针的精度。
8、更进一步地,所述第三驱动件还包括固定设置在所述蜗杆的一端部的旋钮,所述旋钮设置在所述前段支架的外部。医生在手动旋转旋钮时可驱使第三驱动件转动,将旋钮设置在前段支架的外部,便于手术过程中医生手动操作。
9、本实施例中,将旋钮设置在前段支架的侧部,从而方便手术时医生手动操作旋钮,旋钮的设置位置使得所述蜗杆的中心轴线与所述第一驱动件的中心轴线交错设置。
10、进一步地,所述末端执行器前段还包括用于将所述第三驱动件压紧以消除所述第三驱动件和所述第二驱动件之间的配合间隙的调节件,所述调节件可调位置地设置在所述前段支架内,所述调节件直接或间接抵压所述第三驱动件。通过调节件将第三驱动件向第二驱动件的方向推动,以消除二者之间的配合间隙,保证二者配合的稳定性,从而可提高整个机构的持稳稳定性,避免末端执行器前段出现晃动的情况,影响插针精度。
11、一种具体的实施例,所述第三驱动件包括能够转动地设置在所述前段支架内的蜗杆,所述蜗杆的两端部均设置有轴承,所述调节件为与所述前段支架通过螺纹连接的调节螺钉,所述调节螺钉对应两个所述轴承设置有两个,每个所述调节螺钉均抵设在对应位置处的所述轴承上。通过调节螺钉抵压轴承,间接将蜗杆向蜗轮方向推动,以消除二者之间的啮合间隙。
12、进一步地,所述末端执行器前段还包括用于将所述第二驱动件压紧以消除所述第一驱动件和所述第二驱动件之间的配合间隙的弹性件,所述弹性件的一端部设置在所述前段支架上,所述弹性件的另一端部设置在所述第二驱动件上,所述弹性件处于压缩状态。弹性件始终保持挤压第二驱动件靠向第一驱动件的状态,以消除二者之间的配合间隙,保证二者配合的稳定性。
13、优选地,所述末端执行器还包括设置在所述末端执行器前段和所述末端执行器后段二者中的一者上的指针和设置在另一者上沿所述末端执行器前段转动的周向方向均布分布的刻度线,所述指针位于全部所述刻度线所覆盖的范围内。通过指针指示的刻度线的位置,医生可及时查看末端执行器前段旋转的角度,以保证插针精度。
14、优选地,所述末端执行器前段包括前段支架和设置在所述前段支架上用于夹持所述穿刺针的夹片组件,所述夹片组件包括两个相对设置的夹片,两个所述夹片能够相向或相背运动地设置在所述前段支架上,所述夹片组件具有关闭状态和打开状态,当所述夹片组件处于关闭状态时,两个所述夹片相互靠近,两个所述夹片之间形成用于夹持所述穿刺针的针道孔,当所述夹片组件处于打开状态时,两个所述夹片相互远离。手术时,使夹片组件处于关闭状态,从而可通过末端执行器夹持穿刺针进行穿刺手术;穿刺完成后,使夹片组件处于打开状态,以释放穿刺针。
15、优选地,所述末端执行器前段包括前段支架,所述末端执行器后段包括后段支架,所述末端执行器还包括设置在所述前段支架上用于探测病灶及插针情况的超声模块和设置在所述后段支架上用于显示病灶部位和插针情况的显示屏。通过超声模块和显示屏可使医生在手术过程中实时观察病灶位置和插针推进情况,从而了解手术进程,以提高手术效果。
16、本发明还提供一种手术机器人,所述手术机器人具有如上述任一项所述的末端执行器。
17、由于上述技术方案的运用,本发明的末端执行器与现有技术相比具有下列优点:该末端执行器由末端执行器前段和末端执行器后段两部分组成,且两部分之间可相对转动,穿刺针设置在能够转动的末端执行器前段上,从而在手术机器人驱动末端执行器按照既定轨迹运动停止后,医生在准备插针时如果发现插针角度不理想,如离肋骨太近或者本身规划的插针点有偏移等,可使末端执行器前段相对末端执行器后段转动,以微调插针角度,这样无需重新进行手术流程,使得手术操作简单,可缩短手术进程。
技术特征:
1.一种末端执行器,其特征在于:包括用于夹持穿刺针的末端执行器前段和用于与手术机器人的机械臂连接的末端执行器后段,所述末端执行器前段能够转动地设置在所述末端执行器后段上,所述末端执行器还包括用于驱使所述末端执行器前段相对所述末端执行器后段转动的驱动机构。
2.根据权利要求1所述的末端执行器,其特征在于:所述末端执行器前段包括前段支架,所述末端执行器后段包括后段支架,所述前段支架能够转动地设置在所述后段支架上,所述驱动机构包括固定设置在所述后段支架内的第一驱动件和能够转动地设置在所述前段支架内的第二驱动件,所述第一驱动件与所述第二驱动件相配合。
3.根据权利要求2所述的末端执行器,其特征在于:所述第一驱动件上设置有第一齿轮,所述第二驱动件上设置有第二齿轮,所述第一齿轮与所述第二齿轮相啮合。
4.根据权利要求2所述的末端执行器,其特征在于:所述驱动机构还包括设置在所述前段支架上用于驱使所述第二驱动件相对所述前段支架转动的第三驱动件,所述第三驱动件与所述第二驱动件相配合。
5.根据权利要求4所述的末端执行器,其特征在于:所述第三驱动件包括能够转动地设置在所述前段支架内的蜗杆,所述第二驱动件上还设置有蜗轮,所述蜗杆与所述蜗轮相啮合。
6.根据权利要求5所述的末端执行器,其特征在于:所述第三驱动件还包括固定设置在所述蜗杆的一端部的旋钮,所述旋钮设置在所述前段支架的外部。
7.根据权利要求5所述的末端执行器,其特征在于:所述蜗杆的中心轴线与所述第一驱动件的中心轴线交错设置。
8.根据权利要求4所述的末端执行器,其特征在于:所述末端执行器前段还包括用于将所述第三驱动件压紧以消除所述第三驱动件和所述第二驱动件之间的配合间隙的调节件,所述调节件可调位置地设置在所述前段支架内,所述调节件直接或间接抵压所述第三驱动件。
9.根据权利要求8所述的末端执行器,其特征在于:所述第三驱动件包括能够转动地设置在所述前段支架内的蜗杆,所述蜗杆的两端部均设置有轴承,所述调节件为与所述前段支架通过螺纹连接的调节螺钉,所述调节螺钉对应两个所述轴承设置有两个,每个所述调节螺钉均抵设在对应位置处的所述轴承上。
10.根据权利要求2所述的末端执行器,其特征在于:所述末端执行器前段还包括用于将所述第二驱动件压紧以消除所述第一驱动件和所述第二驱动件之间的配合间隙的弹性件,所述弹性件的一端部设置在所述前段支架上,所述弹性件的另一端部设置在所述第二驱动件上,所述弹性件处于压缩状态。
11.根据权利要求1所述的末端执行器,其特征在于:所述末端执行器还包括设置在所述末端执行器前段和所述末端执行器后段二者中的一者上的指针和设置在另一者上沿所述末端执行器前段转动的周向方向均布分布的刻度线,所述指针位于全部所述刻度线所覆盖的范围内。
12.根据权利要求1所述的末端执行器,其特征在于:所述末端执行器前段包括前段支架和设置在所述前段支架上用于夹持所述穿刺针的夹片组件,所述夹片组件包括两个相对设置的夹片,两个所述夹片能够相向或相背运动地设置在所述前段支架上,所述夹片组件具有关闭状态和打开状态,当所述夹片组件处于关闭状态时,两个所述夹片相互靠近,两个所述夹片之间形成用于夹持所述穿刺针的针道孔,当所述夹片组件处于打开状态时,两个所述夹片相互远离。
13.根据权利要求1所述的末端执行器,其特征在于:所述末端执行器前段包括前段支架,所述末端执行器后段包括后段支架,所述末端执行器还包括设置在所述前段支架上用于探测病灶及插针情况的超声模块和设置在所述后段支架上用于显示病灶部位和插针情况的显示屏。
14.一种手术机器人,其特征在于:具有如权利要求1~13中任一项所述的末端执行器。
技术总结
本发明公开了一种末端执行器及手术机器人,末端执行器包括用于夹持穿刺针的末端执行器前段和用于与手术机器人的机械臂连接的末端执行器后段,所述末端执行器前段能够转动地设置在所述末端执行器后段上,所述末端执行器还包括用于驱使所述末端执行器前段相对所述末端执行器后段转动的驱动机构。在手术机器人驱动末端执行器按照既定轨迹运动停止后,医生在准备插针时如果发现插针角度不理想,如离肋骨太近或者本身规划的插针点有偏移等,可使末端执行器前段相对末端执行器后段转动,以微调插针角度,这样无需重进行手术流程,使得手术操作简单,可缩短手术进程。
技术研发人员:张永成,王澄,陈世佳
受保护的技术使用者:珠海横乐医疗科技有限公司
技术研发日:
技术公布日:2024/6/11
- 还没有人留言评论。精彩留言会获得点赞!