一种泌尿外科用腹腔镜夹持装置的制作方法
本发明属于医疗器械领域,具体是一种泌尿外科用腹腔镜夹持装置。
背景技术:
1、腹腔镜手术是微创手术的一种,其具有术后瘢痕小的优点,在泌尿外科手术中的使用频率逐步增加。在通过腹腔镜手术对泌尿外科患者进行救治时,需要通过气腹针向患者的腹腔内注入二氧化碳,使得患者的腹部鼓起,且使得腹腔内的相邻的组织可以相对分离,有利于医务人员的操作;众所周知,在腹腔镜手术时,需要通过夹持装置对腹腔镜进行夹持,且患者的腹部需要进行造用于腹腔镜穿过的腹腔镜造口,目前的腹腔镜夹持装置在使用时,不能对腹腔镜与患者腹部腹腔镜造口之间的缝隙进行密封遮挡,患者腹腔内充入的二氧化碳气体容易通过腹腔镜造口意外排出,造成患者腹腔内二氧化碳的量容易不足,从而不利于对患者腹腔内组织的剥离,进而不利于对患者的救治。
2、为了解决上述问题,专利公开号cn113545727a公开了一种泌尿外科用腹腔镜夹持装置,包括:连接球,所述连接球连接有支架机构,所述支架机构的一端连接有用于夹持手术床的夹子,且支架机构的另一端活动连接有用于夹持腹腔镜的腹腔镜夹持机构;具有长度调节功能的连接杆机构,具有长度调节功能的所述连接杆机构的上端与连接球连接,且具有长度调节功能的连接杆机构的下端连接有用于避免腹腔镜造口意外出气的封堵机构。
3、上述泌尿外科用腹腔镜夹持装置,通过封堵机构进行封堵,减少人工气腹的出气量,但医生在移动腹腔镜时,手部会不自主的轻微抖动,从而使腹腔镜成像晃动。
技术实现思路
1、为了解决现有技术中医生在移动腹腔镜时,手部会不自主的轻微抖动,从而使腹腔镜成像晃动问题,本发明的目的是提供一种泌尿外科用腹腔镜夹持装置,能够减少医务人员在移动腹腔镜时的抖动。
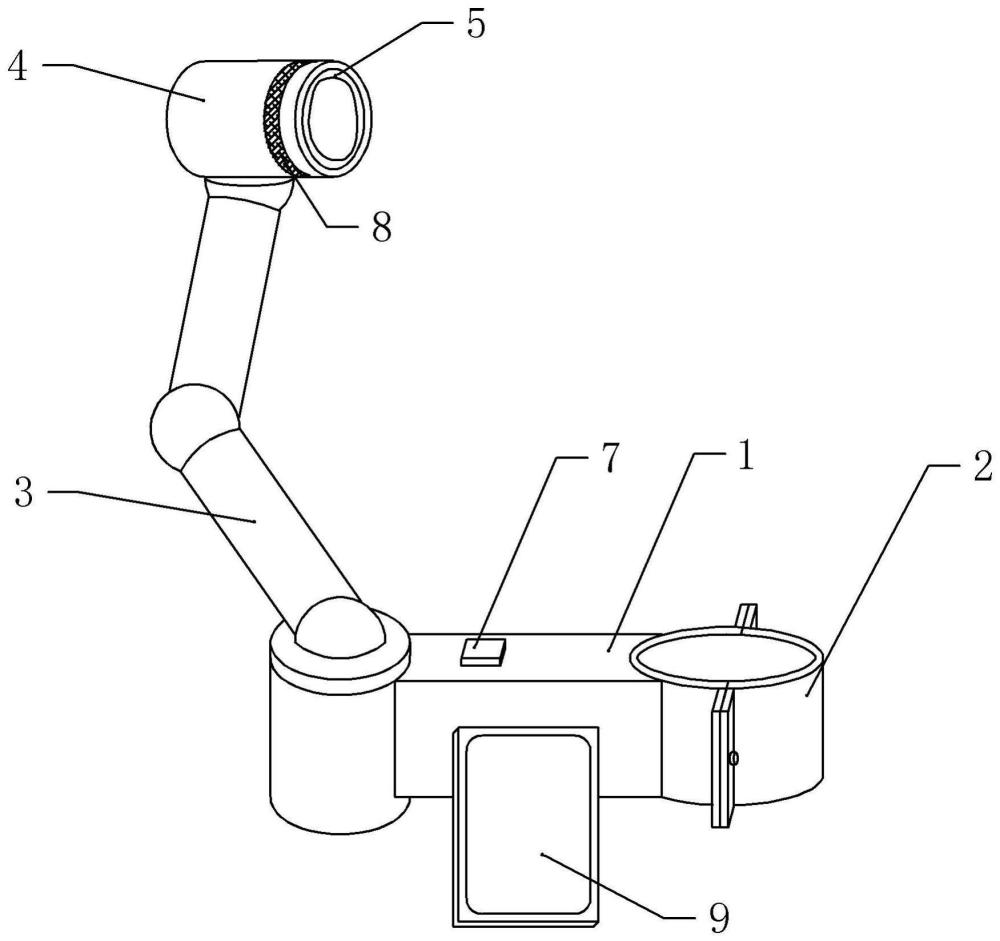
2、为了实现上述目的,本发明的技术方案如下:一种泌尿外科用腹腔镜夹持装置,包括支架,支架一侧固定连接有用于与手术床固定的固定器,支架另一侧固定连接有机械臂,机械臂至少有3个万向关节,机械臂末端固定连接有腹腔镜固定环,腹腔镜固定环内固定连接有环形气囊,环形气囊内设有第一感应器组和第二感应器组,第一感应器组和第二感应器组均为若干沿环形气囊内侧分布的压力传感器,第一感应器组和第二感应器组分别位于环形气囊两端,支架上固定连接有控制器,机械臂、第一感应器组和第二感应器组均与控制器信号连接;
3、控制器用于检测第一感应器组和第二感应器组收集的压力数据,控制器内存储有第一感应器组和第二感应器组内每个压力传感器的位置信息,根据压力数据的大小结合各压力传感器位置信息,计算出使用者的施力方向,控制器控制机械臂朝施力方向进行移动。
4、采用上述方案后实现了以下有益效果:使用将固定器固定在手术床上,将腹腔镜伸入腹腔镜固定环中,向环形气囊内充气直至将腹腔镜紧固。将腹腔镜探入患者腹腔。
5、使用者能够手持腹腔镜远离患者腹腔的一端,此时腹腔镜固定环位于患者腹腔和使用者手部之间。使用者通过手对腹腔镜施力,虽然腹腔镜紧固并且不会移动,但力依然会传导至第一感应器组和第二感应器组。由于以腹腔镜固定环为支点,第一感应器组和第二感应器组所受到的力的方向为以环形气囊中心对称的,因此控制器能够通过第一感应器组和第二感应器组采集的数据中压力点位,判断使用者的施力方向,并通过机械臂控制腹腔镜进行移动。机械臂的机械结构能够使腹腔镜的移动更为稳定且不会晃动。
6、使用者手部会不自主的轻微抖动,但反馈在第一感应器组和第二感应器组的数据很小,因此通过对压力数据的大小的筛选,能够将患者手部抖动的方向剔除,以消除使用者手部抖动带来的影响。
7、与现有技术相比,通过机械臂控制腹腔镜移动,使腹腔镜的移动更为稳定;通过检测的压力数据,以消除患者手抖对腹腔镜成像的影响;通过第一感应器组和第二感应器组,使装置有良好的人机互动性,并能够保持使用者的现有操作习惯。
8、进一步,腹腔镜固定环外侧环绕有触摸感应带。
9、有益效果:由于以腹腔镜固定环为支点施力,第一感应器组和第二感应器组上检测的压力很难相同,因此不方便进行完全竖直或横向的移动。触摸感应带能够密布在这些方向上的移动命令缺失,进一步方便使用者调整腹腔镜位置。
10、进一步,控制器还用于收集施力方向的压力数据,根据压力数据的大小调整机械臂移动速度。
11、有益效果:在正常场景中,使用者施加的力越大根据f=ma腹腔镜移动时的加速度也越大。通过检测压力的大小控制腹腔镜,使腹腔镜的控制更随使用者心意,减少患者适应装置操作的适应时间。
12、进一步,支架上固定连接有触控显示屏,触控显示屏与控制器信号连接;触控显示屏用于显示机械臂的移动信息。
13、有益效果:触控显示屏能够展示信息并接收控制命令,方便使用者查看机械臂的详细信息和输入控制指令。
14、进一步,触控显示屏还用于通过输入参数控制机械臂移动。
15、有益效果:利用输入参数控制机械臂移动能够使机械臂的移动更精确,但操作耗时更长且没有体感反馈,仅能够适用于少数情况。
16、进一步,控制器用于在输入参数控制机械臂移动时,收集第一感应器组和第二感应器组的压力数据,当压力数据出现异常增大时,控制机械臂以压力的反方向移动直到压力数据正常。
17、有益效果:通过收集第一感应器组和第二感应器组的压力数据,能够检测在输入参数控制机械臂移动时,腹腔镜是否碰撞患者体内器官或其他仪器,并及时减少碰撞带来的损伤。
18、进一步,触控显示屏还用于控制机械臂进入或退出防误触模式,防误触模式下机械臂保持当前状态并不会受其他控制而移动。
19、有益效果:通常腹腔镜手术由多位医生进行,存在碰撞腹腔镜的风险。通过进入防误触模式,即时碰撞也不会控制腹腔镜移动,以减少碰撞腹腔镜带来的安全隐患。
20、进一步,机械臂停止移动10s后进入防误触模式。
21、有益效果:机械臂停止移动10s能够说明腹腔镜以到达指定位置,因此进入防误触模式防止误触或碰撞。
技术特征:
1.一种泌尿外科用腹腔镜夹持装置,其特征在于:包括支架,支架一侧固定连接有用于与手术床固定的固定器,支架另一侧固定连接有机械臂,机械臂至少有3个万向关节,机械臂末端固定连接有腹腔镜固定环,腹腔镜固定环内固定连接有环形气囊,环形气囊内设有第一感应器组和第二感应器组,第一感应器组和第二感应器组均为若干沿环形气囊内侧分布的压力传感器,第一感应器组和第二感应器组分别位于环形气囊两端,支架上固定连接有控制器,机械臂、第一感应器组和第二感应器组均与控制器信号连接;
2.根据权利要求1所述的泌尿外科用腹腔镜夹持装置,其特征在于:腹腔镜固定环外侧环绕有触摸感应带。
3.根据权利要求2所述的泌尿外科用腹腔镜夹持装置,其特征在于:控制器还用于收集施力方向的压力数据,根据压力数据的大小调整机械臂移动速度。
4.根据权利要求3所述的泌尿外科用腹腔镜夹持装置,其特征在于:支架上固定连接有触控显示屏,触控显示屏与控制器信号连接;触控显示屏用于显示机械臂的移动信息。
5.根据权利要求4所述的泌尿外科用腹腔镜夹持装置,其特征在于:触控显示屏还用于通过输入参数控制机械臂移动。
6.根据权利要求5所述的泌尿外科用腹腔镜夹持装置,其特征在于:控制器用于在输入参数控制机械臂移动时,收集第一感应器组和第二感应器组的压力数据,当压力数据出现异常增大时,控制机械臂以压力的反方向移动直到压力数据正常。
7.根据权利要求6所述的泌尿外科用腹腔镜夹持装置,其特征在于:触控显示屏还用于控制机械臂进入或退出防误触模式,防误触模式下机械臂保持当前状态并不会受其他控制而移动。
8.根据权利要求7所述的泌尿外科用腹腔镜夹持装置,其特征在于:机械臂停止移动10s后进入防误触模式。
技术总结
本发明公开了医疗器械领域的一种泌尿外科用腹腔镜夹持装置,包括支架,支架一侧固定连接有用于与手术床固定的固定器,支架另一侧固定连接有机械臂,机械臂至少有3个万向关节,机械臂末端固定连接有腹腔镜固定环,腹腔镜固定环内固定连接有环形气囊,环形气囊内设有第一感应器组和第二感应器组,第一感应器组和第二感应器组均为若干沿环形气囊内侧分布的压力传感器,第一感应器组和第二感应器组分别位于环形气囊两端,支架上固定连接有控制器,机械臂、第一感应器组和第二感应器组均与控制器信号连接。采用本发明的发明,能够减少医务人员在移动腹腔镜时的抖动。
技术研发人员:邓超月,张陈,何伟
受保护的技术使用者:贵航贵阳医院
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!