一种石墨烯增强压电复合材料驱动智能结构响应分析方法、装置、介质及设备
本发明涉及复合材料,具体涉及一种石墨烯增强压电复合材料驱动智能结构响应分析方法、装置、介质及设备。
背景技术:
1、石墨烯作为一种新兴材料,通过其优异的电学、热学与力学性能引起了工业界与学术界的广泛关注。在基体材料中加入少量的石墨烯,基体材料的导电性、存储模量、断裂应力和杨氏模量都有着显著的提高。已公开的研究表明:将石墨烯片作为增强相,可进一步强化压电复合材料的介电、力学、压电与热电性能,因此,石墨烯材料在微观电子与传感技术领域中具备巨大的潜力。
2、石墨烯具有优越的电学特性,已有的实验发现石墨烯材料在通电后具有良好的压电效应,石墨烯复合材料变形可使灯泡发光。将单层石墨烯片掺入到聚偏二氟乙烯压电纳米板中,其力学性能和控制性能有着显著的提升,这说明石墨烯增强压电复合材料在压电纳米元器件的设计和智能控制领域中有很大的发展空间。石墨烯增强压电复合材料元器件可作为控制系统的驱动器来驱动结构变形,然而随着新型复合材料的快速发展,其驱动响应分析方法明显滞后,急需相应的方法来分析石墨烯增强压电复合材料的驱动响应。因此,对于石墨烯增强压电复合材料驱动智能结构的精确建模,以及实现对其驱动响应的分析具有重要意义。
技术实现思路
1、针对现有技术中存在的不足,本发明的第一个目的在于提供一种石墨烯增强压电复合材料驱动智能结构响应分析方法,实现对压电驱动智能复合材料结构响应的准确预测,对石墨烯压电复合材料在压电纳米元器件的设计和智能控制领域具有重要应用价值。
2、为此,本发明的上述目的通过如下技术方案实现:
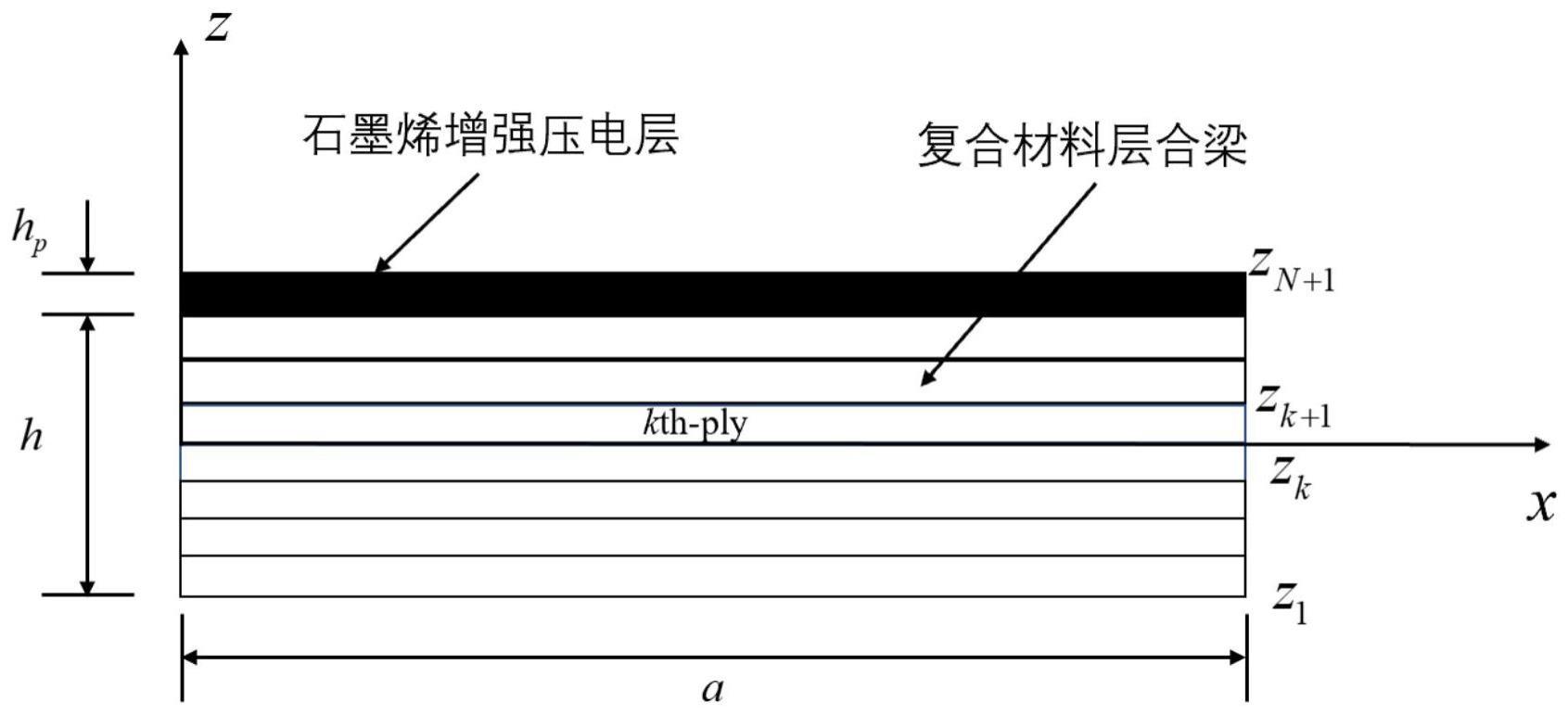
3、一种石墨烯增强压电复合材料驱动智能结构响应分析方法,其特征在于:具体包括:s1:假设压电复合材料层合梁的横向位移场,为更好的描述力电耦合载荷作用下横向位移的局部变化,将层间力电耦合特性引入横向位移假设中;
4、s2:对压电复合材料层合梁进行建模,将整体位移函数与局部位移函数结合,建立分析压电复合材料层合梁的初始位移场;
5、s3:利用横向剪切应力连续条件和自由表面条件,消去建立初始位移场中依赖于层数的位移参数,获得最终位移场的表达式;
6、s4:基于增强体和压电基体的材料属性以及压电基体的压电常数,推导石墨烯增强复合材料单层的等效弹性模量和压电常数;
7、s5:对建立的最终位移场进行离散,利用三节点梁单元推导单元刚度矩阵并进行组装,得到总刚度矩阵,计算石墨烯增强压电复合材料层合梁的应力和变形,获得石墨烯增强复合材料驱动的响应参数。
8、进一步的,所述步骤s1中,
9、将横向位移场假设分成两部分,横向整体位移函数和横向局部位移函数,且在局部位移函数中引入电场的影响,其表达式为:
10、
11、其中,角标k表示层数;wg和分别表示横向整体位移函数和横向局部位移函数,具体假设为:
12、
13、
14、其中,w0表示横向位移,和φ(x)分别表示电势沿板厚度和轴向分布。
15、进一步的,所述步骤s2中,
16、基于整体-局部的思想,初始位移场由整体位移函数和局部位移函数组成,可写为:
17、
18、其中,角标k表示层数;wg和分别表示横向整体位移函数和横向局部位移函数,ug和分别表示轴向整体位移函数和轴向局部位移函数,具体可写为:
19、
20、u0分别表示面内刚体位移,u1表示转角,u2表示高阶项;
21、表示能够模拟压电层合结构面内位移分层特性的局部位移函数,具体的表达式如下:
22、
23、其中,和表示线性插值函数,可写为:
24、
25、其中局部坐标ξk=(2z-zk+1-zk)/(zk+1-zk);和表示层间界面位移函数,需要注意的是和是依赖于坐标x的函数,这一性质使压电复合材料层合梁的初始位移场更好的模拟层间的分层效应;
26、此外,和这两个限制条件被用在压电复合材料层合梁的初始位移场中。
27、进一步的,所述步骤s3中,
28、利用横向剪切应力连续条件,消去依赖于层数的位移参数,横向剪切应力连续条件可写为:
29、
30、上述横向剪切应力连续条件包含n-1个条件,另外2个条件由横向应力的自由表面条件提供,所述自由表面条件可写为:
31、
32、综上,将步骤s2中压电复合材料层合梁的初始位移场代入横向剪切应力连续条件和自由表面条件中,一共提供了n+1个条件,组成n+1个线性方程:
33、
34、
35、系数矩阵su、tu和yu可写为:
36、
37、其中,表示剪切弹性模量,ai=2/(zi+1-zi),i=1~n;
38、
39、根据公式(10)变形可得如下方程:
40、
41、将公式(14)带入步骤s2得出的压电复合材料层合梁的初始位移场中,得出压电复合材料层合梁的最终位移场:
42、
43、其中,系数和可写为:
44、当k=1~n-1时
45、
46、当k=n时
47、
48、这里需要指出的是,最终位移场中电势变量φ不是未知变量,可在计算时当作外部载荷给出。
49、进一步的,所述步骤s4中,
50、石墨烯增强复合材料压电层是由压电材料聚偏二氟乙烯作为基体,以石墨烯作为增强材料,基于修正halpin-tsai模型,石墨烯增强复合材料压电层的等效弹性模量可写为:
51、
52、其中,
53、
54、角标g和m分别表示石墨烯和压电基体,ag、bg和hg分别表示石墨烯片的长度、宽度和厚度,vg和vm分别表示石墨烯和压电基体的体积分数,vg和vm应满足条件vg+vm=1;
55、其中,石墨烯增强压电层的泊松比vp和压电常数eij可表示为:
56、
57、进一步的,所述步骤s5中,
58、根据步骤s3中的最终位移场,压电复合材料层合梁的应变可写为:
59、
60、其中
61、
62、
63、对于线弹性材料,压电复合材料层合梁的本构关系可写为:
64、
65、其中和表示第k层偏轴弹性模量和压电常数,电场e可表示为:
66、
67、
68、
69、vt表示外部施加的电压,h和hp分别为压电复合材料层合梁和石墨烯增强复合材料压电层的厚度;
70、利用节点变量,最终位移场的位移参数在一个单元内可离散为:
71、
72、其中l1=ξ(1-ξ)/2,l2=1-ξ2,l3=ξ(1+ξ)/2;ξ=2(x-xc)/(xi3-xi1),xc=(xi1+xi3)/2,xi1和xi3表示第i个单元内第一个节点和第三个节点的坐标;
73、根据压电复合材料层合梁的应变,应变矢量可写为:
74、
75、其中uk=[u v w]t,b=[b1 b2 b3],为第i个节点的自由度,可写为:
76、
77、
78、
79、其中,i=1~3;
80、基于虚位移原理,压电复合材料层合梁内力做功与外力做功相等,可得:
81、
82、其中wi表示外力在第i个单元上的外力做的功;
83、将压电复合材料层合梁的应变和本构关系带入公式(33)可得单元平衡方程:
84、
85、其中ke表示单元刚度矩阵,fe表示外力矢量,表示外部施加电场矢量,分别可表示为:
86、ke=∫ebtqbdxdz (35)
87、
88、
89、组装所有单元刚度矩阵,可得总体平衡方程:
90、kδ=f+fp (38)
91、其中k为总体刚度矩阵;f和fp分别为总体外载荷矢量和电载荷矢量。
92、本发明第二个目的在于,提供一种石墨烯增强压电复合材料驱动智能结构响应分析装置。
93、为此,本发明的上述目的通过如下技术方案实现:
94、所述石墨烯增强压电复合材料驱动智能结构响应分析装置包括:
95、物理特性引入模块:假设压电复合材料层合梁的横向位移场,并将层间力电耦合特性引入横向位移假设中;
96、初始位移场构建模块:通过对压电复合材料层合梁进行建模,将整体位移函数与局部位移函数结合,从而构建压电复合材料层合梁的初始位移场;
97、最终位移场构建模块:利用横向剪切应力连续条件和自由表面条件,消去建立初始位移场中依赖于层数的位移参数,获得压电复合材料层合梁的最终位移场;
98、材料参数推导模块:基于增强体和压电基体的材料属性以及压电基体的压电常数,推导石墨烯增强复合材料单层的等效弹性模量和压电常数;
99、响应参数计算模块:对建立的最终位移场进行离散,利用三节点梁单元推导单元刚度矩阵并进行组装,得到总刚度矩阵,计算石墨烯增强压电复合材料层合梁的应力和变形,获得石墨烯增强复合材料驱动的响应参数;
100、物理特性引入、初始位移场构建、最终位移场构建、材料参数推导以及响应参数计算五个模块逐级递进,前序模块为后序模块提供输入数据。
101、本发明第三个目的在于,还提供了一种电子设备,其特征在于,包括:至少一个处理器;至少一个存储器,用于存储至少一个程序;当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现上述中任一项所述的石墨烯增强压电复合材料驱动智能结构响应分析方法。
102、本发明第四个目的在于,还提供了一种计算机可读存储介质,其中存储有处理器可执行方法步骤,其特征在于,所述处理器可执行的方法步骤在由处理器执行时用于实现上述中任一项所述的石墨烯增强压电复合材料驱动智能结构响应分析方法。
103、本发明与现有技术相比,具有以下优点及有益效果:
104、本发明通过引入力电耦合效应,对压电驱动智能复合材料层合梁进行建模,利用三角形三节点单元推导了压电智能复合材料梁的有限元列式,形成了准确的石墨烯增强压电复合材料驱动智能层合梁响应分析方法,解决了压电驱动复合材料层合结构驱动响应分析的难题。与现有技术相比,本发明提出的方法通过在位移场中引入力电耦合特性,不仅能够大大提升预测响应精度,且不增将额外的未知变量,缩短计算时间,极大提升计算效率,具备很高的工程应用价值。
- 还没有人留言评论。精彩留言会获得点赞!