前视机械四维心腔内超声成像系统的制作方法
本发明涉及超声成像领域,特别是涉及一种前视机械四维心腔内超声成像系统。
背景技术:
1、心脏疾病是重要的人类健康问题,包括瓣膜疾病(如瓣膜狭窄和关闭不齐)、心律不齐(如房颤、房扑)、心肌肥厚等。导管介入由于微创和安全性,是当前心脏疾病的一线临床治疗手段。当前,多种心内导管介入手术中,精准心脏结构四维成像是操作安全有效的前提。例如,心腔内标测和消融过程中,往往需要对心脏结构四维成像,从而确定导管与心内膜的贴合状态及确定病灶靶点的相对位置。因此,一种快速心脏四维成像技术,能够为心内介入手术提供精准实时图像引导,从而降低手术难度、提高手术安全性,具有重要的临床意义。
技术实现思路
1、鉴于上述问题,提出了本发明实施例以便提供一种克服上述问题或者至少部分地解决上述问题的一种前视机械四维心腔内超声成像系统。
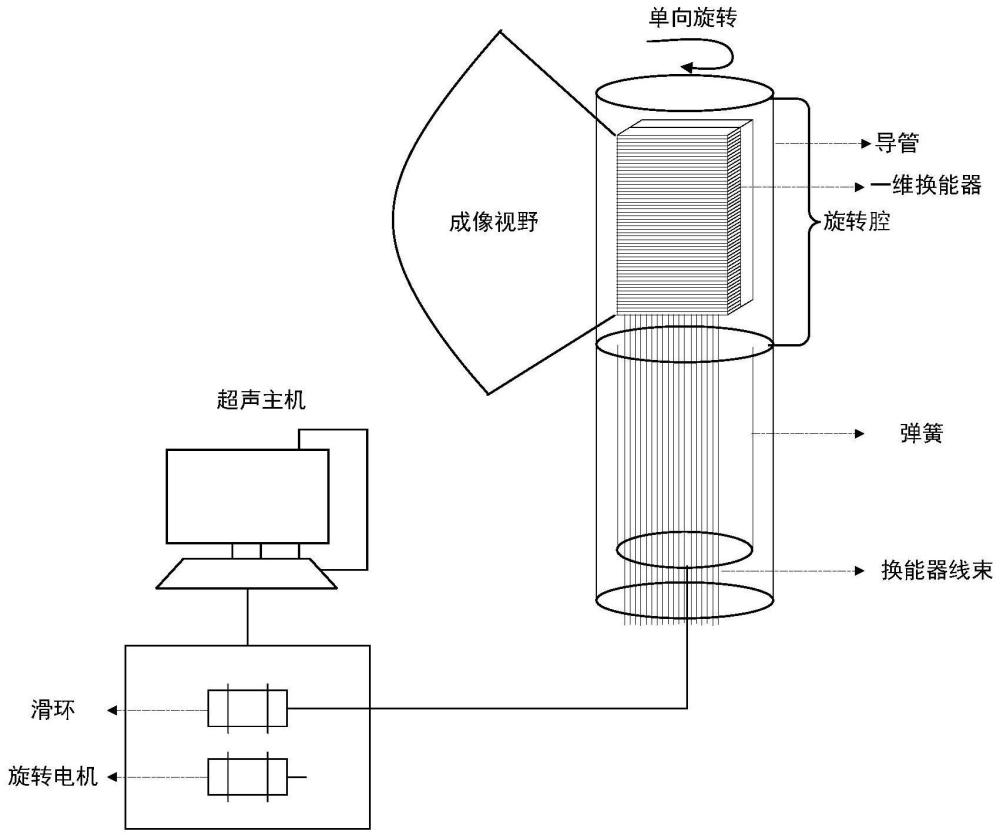
2、本发明实施例提供一种前视机械四维心腔内超声成像系统,所述系统至少包括:超声主机、滑环、主机端和耗材端连接器、电机、换能器、鞘管和弹簧圈,其中,所述超声主机通过所述滑环相连到主机端连接器,所述耗材端连接器通过线缆和弹簧圈连接到换能器;
3、所述电机用于驱动所述滑环均匀高速旋转;
4、所述滑环包括转子端和静子端,静子端与主机端连接器直接连接,转子端与导管相连接。电机驱动滑环转子端旋转,从而带动转子端连接器、弹簧圈和换能器在鞘管内绕着换能器中心旋转;
5、所述弹簧圈用于驱动所述超声探头在鞘管内旋转;
6、所述超声探头用于发射和接收不同方向的超声波束;
7、所述超声主机用于根据所述不同方向的超声波束,生成绕中轴高速旋转的二维图像,并将不同旋转角度所成的所述二维图像进行三维重建,对重建后的四维图像进行渲染和图像显示。
8、可选地,所述滑环包括静子端和转子端,所述转子端与所述旋转电机相连并旋转,所述静子端连接所述超声主机并静止,转子端与静子端存在相对运动,并电气连接。
9、可选地,所述换能器为呈一维排列的相控阵探头,以其中心为旋转中心进行单向、均匀高速旋转。
10、可选地,所述换能器每绕其中心旋转180°,可以得到一幅三维图像,当设定超声四维成像卷率为f时候,电机和滑环转速为0.5*f。
11、可选地,所述超声主机通过换能器发射和接收不同方向的超声波束,生成多帧绕转轴中心旋转的二维图像,并将不同旋转角度所成的所述二维图像进行快速三维重建,并对重建后的四维图像进行和显示,包括:
12、获取超声波束上每个体素的坐标位置,以及体素点到超声换能器每个通道之间的距离,计算发射和接收延时;
13、计算每个体素点在球坐标内的空间角,进行二维图像重建;
14、在超声探头每次绕中轴旋转180°后,根据所述空间角对所有的二维图像在笛卡尔坐标系下进行快速三维图像重建;
15、当设定四维成像卷率为f时,电机、滑环和换能器转速为0.5*f;
16、根据所述空间角进行插值处理,根据所述坐标信息,计算每个空间角的灰度值;
17、对生成四维图像进行渲染和图像显示。
18、可选地,所述换能器在高速单向均匀旋转同时,依次发射多条聚焦超声波束进行平面扫描,或通过依次发射多个非聚集平面波,进行平面扫描,并接收组织的回波信号。
19、可选地,所述换能器通过线束与耗材端连接器连接,所述换能器线束为同轴电缆或柔性电路板;换能器在鞘管内旋转,鞘管保持静止。
20、可选地,所述换能器线束与换能器和弹簧圈位于鞘管内,使用时注射耦合液、排空超声换能器与鞘管之间气体。
21、可选地,所述鞘管为硬度渐变的可调弯鞘,导管远端较软、近端较硬,鞘管管壁内集成拉丝,通过手柄操作拉动拉丝、对鞘管进行调弯。
22、可选地,所述电机和滑环位于可调支臂上,使用时通过调整支臂位置,调整导管到病人距离。
23、本发明实施例包括以下优点:
24、本发明实施例提供的前视机械四维心腔内超声成像系统前视机械四维,所述系统至少包括:超声主机、滑环、连接器、旋转电机、换能器、超声探头鞘管和弹簧圈,。其中,超声主机依次和弹簧圈通过分别与滑环相连、连接器、线缆和弹簧圈连接到换能器,。使用时,滑环还与旋转电机驱动多通道滑环相连单向旋转,从而带动连接器、弹簧圈和弹簧圈通过换能器在鞘管内与超声探头相连单向高速均匀旋转。同时,换能器探头用于发射、接收不同方向的前向超声波束;超声主机用于根据不同方向的超声波束,生成多帧绕中轴旋转的二维图像,并将不同旋转角度所成的二维图像进行快速三维重建,对重建后的图像进行渲染,得到重建后的四维图像,并进行渲染和实时显示。相比于侧视机械四维超声,本发明换能器前视且绕中轴旋转、换能器每旋转一圈能得到两幅三维图像,因此能够在设定的四维成像卷率下,降低转速及对电机、滑环和密封等结构的要求。
技术特征:
1.一种前视机械四维心腔内超声成像系统,其特征在于,所述系统至少包括:超声主机、滑环、主机端和耗材端连接器、电机、换能器、鞘管和弹簧圈,其中,所述超声主机通过所述滑环相连到主机端连接器,所述耗材端连接器通过线缆和弹簧圈连接到换能器;
2.根据权利要求1所述的系统,其特征在于,所述滑环包括静子端和转子端,所述转子端与所述旋转电机相连并旋转,所述静子端连接所述超声主机并静止,转子端与静子端存在相对运动、并电气连接。
3.根据权利要求1所述的系统,其特征在于,所述换能器为呈一维排列的相控阵探头,以其中心为旋转中心进行单向、均匀高速旋转。
4.根据权利要求3所述的系统,其特征在于,所述换能器每绕其中心旋转180°,可以得到一幅三维图像,当设定超声四维成像卷率为f时候,电机和滑环转速为0.5*f。
5.根据权利要求1所述的系统,其特征在于,所述超声主机通过换能器发射和接收不同方向的超声波束,生成多帧绕转轴中心旋转的二维图像,并将不同旋转角度所成的所述二维图像进行快速三维重建,并对重建后的四维图像进行和显示,包括:
6.根据权利要求1所述的系统,其特征在于,所述换能器在高速单向均匀旋转同时,依次发射多条聚焦超声波束进行平面扫描,或通过依次发射多个非聚集平面波,进行平面扫描,并接收组织的回波信号。
7.根据权利要求1所述的系统,其特征在于,所述换能器通过线束与耗材端连接器连接,所述换能器线束为同轴电缆或柔性电路板。换能器在鞘管内旋转,鞘管保持静止。
8.根据权利要求7所述的系统,其特征在于,所述换能器线束与换能器和弹簧圈位于鞘管内,使用时医生注射耦合液、排空超声换能器与鞘管之间气体。
9.根据权利要求8所述的系统,其特征在于,所述鞘管为硬度渐变的可调弯鞘,导管远端较软、近端较硬,鞘管管壁内集成拉丝,通过手柄操作拉动拉丝、从而对鞘管进行调弯。
10.根据权利要求1所述的系统,其特征在于,所述电机和滑环位于可调支臂上,使用时可以通过调整支臂位置,调整导管到病人距离。
技术总结
本发明实施例提供了一种前视机械四维心腔内超声成像系统,该系统至少包括:超声主机、滑环、连接器、电机、换能器、鞘管和弹簧圈。超声主机依次通过滑环、连接器、线缆和弹簧圈连接到换能器。使用时,电机驱动多通道滑环单向旋转,从而带动连接器、弹簧圈和换能器在鞘管内单向高速均匀旋转。同时,换能器发射、接收不同方向的前向超声波束,生成多帧绕中轴旋转的二维图像,并将不同旋转角度所成的二维图像进行快速重建,得到重建后的四维图像并进行渲染和实时显示。相比于侧视机械四维超声,换能器前视且绕中轴旋转、换能器每旋转一圈能得到两幅三维图像,因此能够在设定的四维成像卷率下,降低转速及对电机、滑环和密封等结构的要求。
技术研发人员:周欣欢,梅佳
受保护的技术使用者:深圳心寰科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!