一种机械臂的制作方法
本发明涉及机械手领域,尤其涉及一种机械臂。
背景技术:
1、在现代的单孔腹腔镜机器人手术中,像妇科类手术的术式,c型臂上的第4号臂与病人人体摆位存在干涉风险,主治医生想灵活操作此类手术是一大挑战。此外,腔镜手术需使用多把手术器械且根据手术类型的不同,器械需进行灵活组合来适应不同的手术场景,设计灵活、快速拆卸,无菌,减少手前准备时间,成为重点。传统可拆臂和c臂的结构连接方式最为关键,传统连接结构痛点如下:
2、(1)机械部分采用拆卸插销与导向连接,加工复杂,连接精度差且不容易拆,增加了机械臂拆装难度。c型臂和可拆臂的锁紧连接方式设计为简单结构,刚度差;拆卸臂比较笨重的时候,现有结构不能满足;拆卸臂安装到c臂后是固定死的,手术前安装无菌保护套困难;拆卸臂和c臂使用螺丝连接,缺少定位,拆卸臂安装到c臂后位置会有晃动引起偏差,最终引起器械安装的偏差。
3、(2)机械结构空间狭小,供电和供网所使用的线缆较多,不便于物理布线,从而无法实现机械和电气系统简易拆装;拆卸臂拆卸时,需要护士插拔网线和电线,增加术前准备时间,不利于操作。
4、(3)可拆臂和c臂无灵活的调整空间,术前在c臂上安装无菌保护套特别困难。拆卸臂不带无菌功能,不能根据手术需求在术中根据情况自由拆装拆卸臂。
5、由于手术机器人在术中为了考虑无菌及方便消毒,通常会在手术前使用无菌袋套装设备,因此需要一款可拆卸机械臂,无需物理电线传输并保证分系统和整机系统的拆装顺畅。故设计一款新型可拆卸机械臂相当重要。
技术实现思路
1、本发明的目的在于提供一种机械臂,能方便实现第一臂和第二臂的快速拆装,且定位精度高,并可适用于较重的第二臂的拆装。
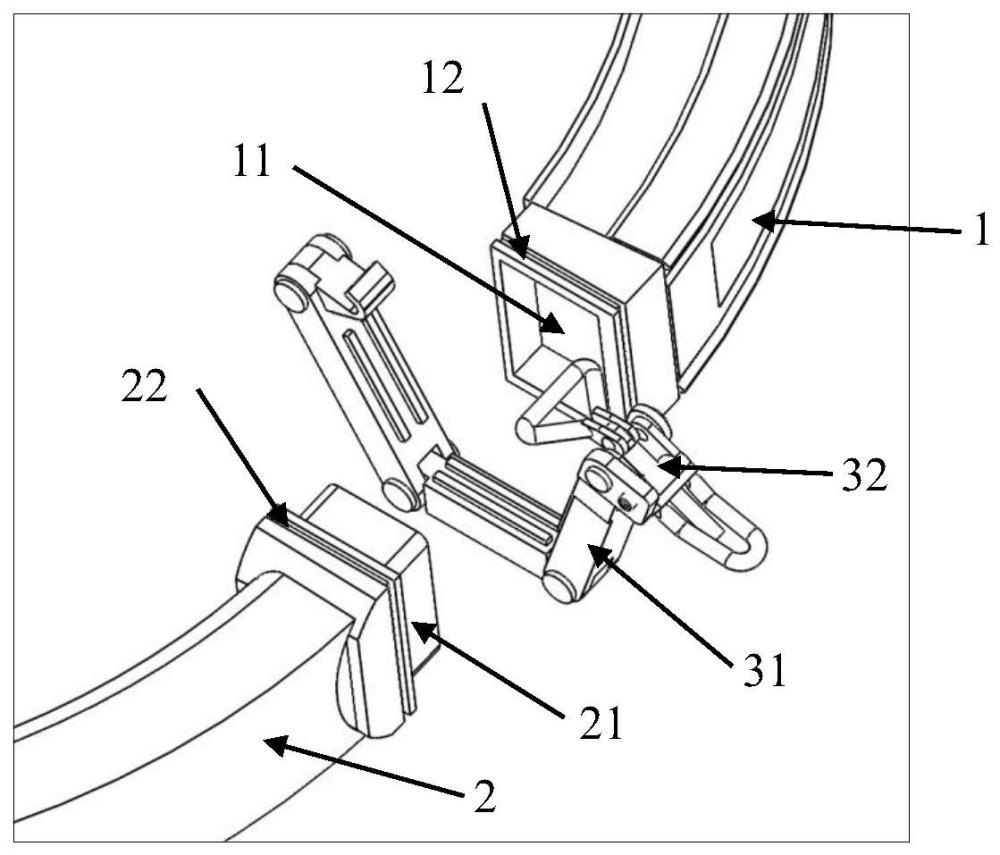
2、本发明的目的是这样实现的,一种机械臂,包括:
3、第一臂,其连接端设有导向槽和第一定位组件;
4、第二臂,其连接端设有导向块和第二定位组件,导向块能周向固定的插设在导向槽内;
5、锁扣装置,其包括压装本体,压装本体包括至少两个顺序铰接的压块,每个压块上均设有第三定位组件和第四定位组件;压装本体能套设在第一臂与第二臂的连接处,压装本体的两端能通过卡扣机构锁紧,且各压块上的第三定位组件能与第一定位组件配合卡接,各压块上的第四定位组件能与第二定位组件配合卡接。
6、在本发明的一较佳实施方式中,第一定位组件包括至少一个第一定位件,第二定位组件包括至少一个第二定位件,第三定位组件包括至少一个第三定位件,第四定位组件包括至少一个第四定位件;第一定位件与第三定位件的数量相同,第二定位件与第四定位件的数量相同。
7、在本发明的一较佳实施方式中,第一定位件和第三定位件以及第二定位件和第四定位件均为相配合的凸块和卡槽,凸块能卡设在卡槽内。
8、在本发明的一较佳实施方式中,第一臂和第二臂的连接端的外轮廓横截面均为多边形,各凸块均为平板块体;或者,第一臂和第二臂的连接端的外轮廓横截面均为圆形,各凸块均为弧形块体。
9、在本发明的一较佳实施方式中,卡扣机构包括被动挂钩、主动挂钩和扳手,被动挂钩与压装本体的第一端铰接,扳手与压装本体的第二端铰接,主动挂钩与扳手的一端铰接,主动挂钩能卡设在被动挂钩上。
10、在本发明的一较佳实施方式中,在压装本体上设有球头弹簧塞,在扳手的侧壁设有限位槽,球头弹簧塞中的限位球能在主动挂钩卡设在被动挂钩后卡设在限位槽内。
11、在本发明的一较佳实施方式中,机械臂还包括无线充电模块,无线充电模块包括:无线发射模块,其包括设在第一臂内的发射端电路板和无线发射线圈,发射端电路板能控制无线发射线圈得电或失电;无线接收模块,其包括设在第二臂内的接收端电路板和无线接收线圈;接收端电路板能控制无线接收线圈得电或失电,并与发射端电路板通讯连接。
12、在本发明的一较佳实施方式中,无线接收模块还包括设在第二臂内的接收端储能控制模块、储能电池和电容,接收端储能控制模块能控制储能电池和电容的充放电,并与接收端电路板通讯连接。
13、在本发明的一较佳实施方式中,在第一臂上套设有第一无菌保护套,在第二臂上套设有第二无菌保护套。
14、在本发明的一较佳实施方式中,第一无菌保护套的一端和第二无菌保护套的一端两者中的其一个设有金属片,另一个设有磁性贴膜,金属片能与磁性贴膜磁性吸合。
15、由上所述,本发明中的机械臂利用导向槽、导向块和锁扣装置可以方便的实现第一臂和第二臂之间的定位安装,且结构简单,拆装操作便捷、灵活。同时,利用导向块与导向槽的配合可以实现第一臂和第二臂安装时的初步定位,利用压块上的第三定位组件和第四定位组件与第一臂上的第一定位组件和第二臂上的第二定位组件的卡接配合能够实现第一臂和第二臂安装时的二次精准定位,进而可以有效提高第二臂在第一臂上的定位精度,相较于现有采用拆卸插销与导向连接的方式而言精度更高,大大减少了器械安装误差,而且可以提高两者连接位置的结构刚度,承重更大。应用于医疗器械领域中,例如应用在单孔腹腔镜机器人中时,可便于助理护士使用并快速拆装机械臂,还便于术前套无菌保护套,进而减少术前准备时间;而且可以根据手术需求将第二臂拆掉,增加患者摆位空间,避免患者体位与器械干涉,并在术中根据情况自由拆装第二臂,使用更加灵活。
技术特征:
1.一种机械臂,其特征在于,包括:
2.如权利要求1所述的机械臂,其特征在于,
3.如权利要求2所述的机械臂,其特征在于,
4.如权利要求3所述的机械臂,其特征在于,
5.如权利要求1所述的机械臂,其特征在于,
6.如权利要求5所述的机械臂,其特征在于,
7.如权利要求1所述的机械臂,其特征在于,所述机械臂还包括无线充电模块,所述无线充电模块包括:
8.如权利要求7所述的机械臂,其特征在于,
9.如权利要求1所述的机械臂,其特征在于,
10.如权利要求9所述的机械臂,其特征在于,
技术总结
本发明为一种机械臂,包括第一臂、第二臂和锁扣装置,第一臂的连接端设有导向槽和第一定位组件,第二臂的连接端设有导向块和第二定位组件,导向块能周向固定的插设在导向槽内。锁扣装置包括压装本体,压装本体包括至少两个顺序铰接的压块,每个压块上均设有第三定位组件和第四定位组件;压装本体能套设在第一臂与第二臂的连接处,压装本体的两端能通过卡扣机构锁紧,且各压块上的第三定位组件能与第一定位组件配合卡接,各压块上的第四定位组件能与第二定位组件配合卡接。本发明的机械臂能方便实现第一臂和第二臂的快速拆装,且定位精度高,并可适用于较重的第二臂的拆装。
技术研发人员:请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名
受保护的技术使用者:上海微创医疗机器人(集团)股份有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!