耳鼻喉电磁导航系统下耳鼻喉手术器械的校准定位方法与流程
本发明涉及医疗器械的校准定位,尤其涉及一种耳鼻喉电磁导航系统下耳鼻喉手术器械的校准定位方法。
背景技术:
1、在现有的耳鼻喉电磁导航系统中,所使用的耳鼻喉手术器械尖端的定位方式是将线圈放置在空心的耳鼻喉手术器械腔体尖端位置处,在磁场发生器的磁场范围中,通过识别线圈的位置从而确定耳鼻喉手术器械尖端的位置。
2、但在目前耳鼻喉手术市场上,耳鼻喉手术器械多样化,考虑到成本及工艺技术等原因,无法将各种类型的耳鼻喉手术器械的腔体空心化,从而无法将线圈放置在器械的尖端,这样便无法对这种耳鼻喉手术器械的尖端进行定位。因此亟需一种耳鼻喉电磁导航系统下耳鼻喉手术器械的校准定位方法。
技术实现思路
1、为了解决现有技术中存在的问题,本申请提出了一种耳鼻喉电磁导航系统下耳鼻喉手术器械的校准定位方法,以便在耳鼻喉电磁导航系统下,精准定位多种耳鼻喉手术器械尖端的位置,保证耳鼻喉手术器械最终的定位精度达到手术的精度要求。
2、为了实现上述目的,本申请提出了一种耳鼻喉电磁导航系统下耳鼻喉手术器械的校准定位方法,包括以下步骤:
3、步骤1、将跟踪装置夹在耳鼻喉手术器械的末端,将跟踪装置的连接线与耳鼻喉电磁导航系统相连,并保证将跟踪装置置于磁场发生器的磁场范围中;
4、步骤2、将位置读取装置的连接线与耳鼻喉电磁导航系统相连,并且保证位置读取装置在磁场发生器的磁场范围内;
5、步骤3、在磁场范围中,将位置读取装置固定住,将步骤1中的耳鼻喉手术器械的尖端持续抵在位置读取装置的基准槽处,手持耳鼻喉手术器械末端使其沿着周向转动,在转动的过程中,使耳鼻喉手术器械末端和尖端的连线与基准槽的底面所在水平面之间的夹角处在30°~60°的范围,在转动过程中,按照预设时间间隔采集n个跟踪装置内线圈的坐标位置信息,n大于等于200,n为整数;
6、步骤4、跟踪装置内线圈的位置与耳鼻喉手术器械尖端的相对位置距离为固定值,利用步骤3采集到的n个数据,通过最小二乘法得到耳鼻喉手术器械尖端在耳鼻喉器械坐标系下的位置信息;
7、步骤5、将步骤4计算得到的耳鼻喉手术器械尖端在耳鼻喉器械坐标系下的位置信息与耳鼻喉电磁导航系统中磁场发生器坐标系、图像坐标系及标定模板坐标系进行矩阵算法的转换,从而得到耳鼻喉手术器械尖端在耳鼻喉电磁导航系统中的精准位置。
8、在一些实施例中,所述步骤4中通过最小二乘法得到耳鼻喉手术器械尖端在耳鼻喉器械坐标系下的位置信息的过程如下:
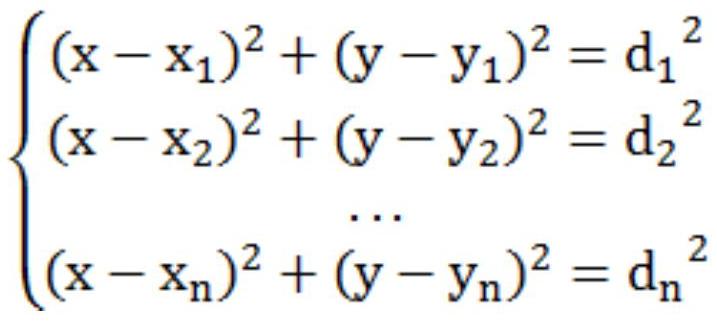
9、把采集到的跟踪装置内线圈的位置信息称之为信标节点;把需要计算得到的耳鼻喉手术器械尖端在耳鼻喉器械坐标系下的位置信息称之为待定位节点;已知n个信标节点的坐标位置为:(x1,y1),(x1,y1)...(xn,yn);信标节点向待定位节点发送数据包,待定位节点测量来自信标节点数据包的信号强度为:(rssi1,rssi2,...,rssin);根据信号传播模型,将这一系列的rssi值转换为相应的距离:(d1,d2,...,dn);联立待定位节点(x,y)、信标节点坐标(xi,yi)、两者直接的距离di得到以下方程组:
10、
11、上式中,第一个方程减去第二个方程,第二个方程减去第三个方程……第(n-1)个方程减去第n个方程,消去方程组中的未知参数:二次方幂x2+y2,就能得到以下方程组:
12、
13、此方程组的矩阵表示形式为:ax=b;
14、上述各个参数分别为:
15、
16、
17、由于在n个方程中,待定位节点坐标x不会符合方程组ax=b中的所有方程,因此设置误差向量为:ε=ax-b,取误差向量中误差的平方和,则有:
18、e=|ε|2=εtε=(ax-b)t(ax-b)
19、若要误差最小,即使e最小,从而将上式对x求导,令导数为0,其表达式为:
20、
21、由于x是关于待定位节点坐标的矩阵形式:因此能够获得待定位节点的估计坐标:(x,y)。
22、本申请的该方案的有益效果在于上述耳鼻喉电磁导航系统下耳鼻喉手术器械的校准定位方法,能够在耳鼻喉电磁导航系统下,精准定位多种耳鼻喉手术器械尖端的位置,使耳鼻喉手术器械在导航图像中精准定位,保证耳鼻喉手术器械最终的定位精度达到手术的精度要求。
技术特征:
1.一种耳鼻喉电磁导航系统下耳鼻喉手术器械的校准定位方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的耳鼻喉电磁导航系统下耳鼻喉手术器械的校准定位方法,其特征在于:所述步骤4中通过最小二乘法得到耳鼻喉手术器械尖端在耳鼻喉器械坐标系下的位置信息的过程如下:
技术总结
本发明提出一种耳鼻喉电磁导航系统下耳鼻喉手术器械的校准定位方法,包括:将与耳鼻喉电磁导航系统相连的跟踪装置夹在耳鼻喉手术器械的末端,将位置读取装置与耳鼻喉电磁导航系统相连,跟踪装置及位置读取装置在磁场发生器的磁场范围内;将位置读取装置固定住,将器械尖端抵在位置读取装置的基准槽处,手持器械末端沿周向转动,过程中采集n个跟踪装置内线圈的坐标位置信息;通过最小二乘法得到器械尖端在耳鼻喉器械坐标系下的位置信息;将上述计算结果与耳鼻喉电磁导航系统中相关坐标系进行矩阵算法的转换,得到器械尖端在耳鼻喉电磁导航系统中的精准位置。上述校准定位方法能在耳鼻喉电磁导航系统下,精准定位多种耳鼻喉手术器械尖端的位置。
技术研发人员:孙靖,孙嘉祥,王炳强,孙世民
受保护的技术使用者:山东威高医疗科技有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!