一种内腔镜控制方法、内腔镜、医疗设备及存储介质与流程
本发明涉及内腔镜控制,尤其涉及一种内腔镜控制方法、内腔镜、医疗设备及存储介质。
背景技术:
1、目前,内腔镜手术作为一种微创手术技术,在胸部外科、腹部外科、泌尿外科、妇科等多个临床手术中都得到了广泛的应用。通过内腔镜手术,医务人员可以通过小切口将内腔镜插入体内,进行内部器官的检查和治疗,从而避免了传统开放手术所需的大切口。
2、传统的内腔镜中,通常使用结构拉丝等方式来实现镜头的移动。这种方式需要医务人员长时间握住手柄来保持手部的稳定,不仅给医务人员带来不便,而且可能因为手部动作过大而使腔镜的镜头触碰到病人器官等身体部位,无法精准控制。
技术实现思路
1、基于此,本发明实施例提供一种内腔镜控制方法、装置、计算机设备及存储介质,以解决传统的手柄式操作方式导致医务人员的操作疲劳的问题。
2、一种内腔镜控制方法,包括:
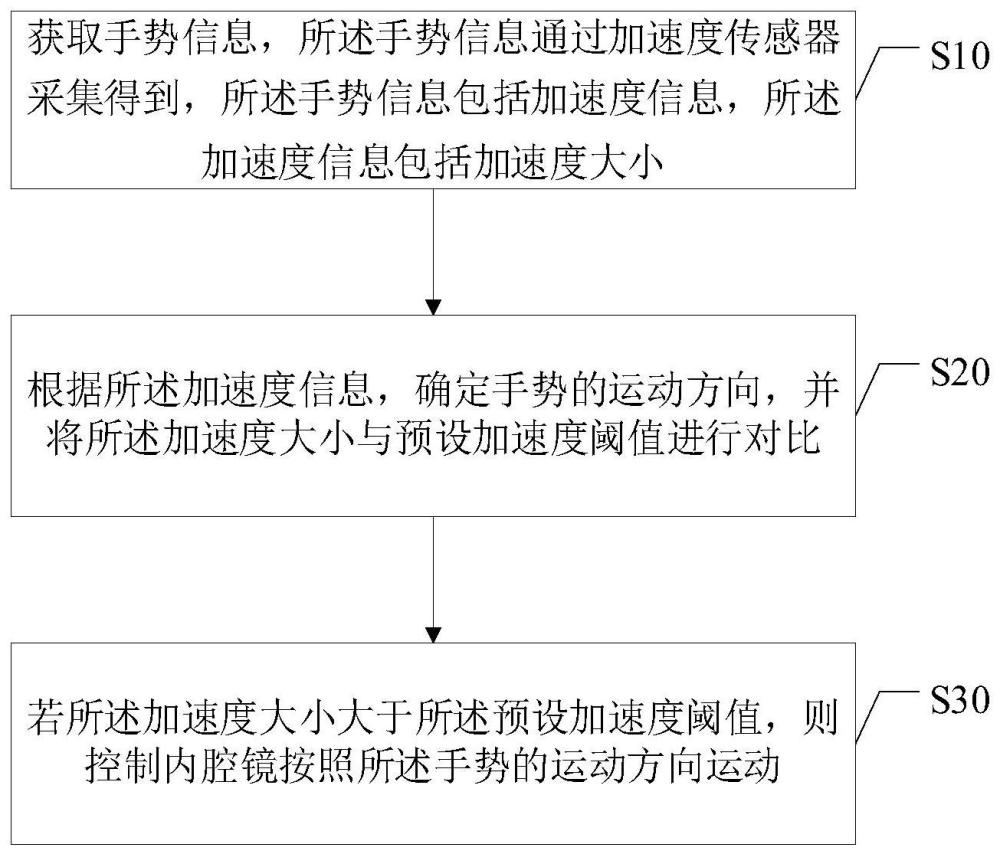
3、获取手势信息,所述手势信息通过加速度传感器采集得到,所述手势信息包括加速度信息,所述加速度信息包括加速度的大小;
4、根据所述加速度信息,确定手势的运动方向,并将所述加速度的大小与预设加速度阈值进行对比;
5、若所述加速度的大小大于所述预设加速度阈值,则控制内腔镜按照所述手势的运动方向运动。
6、在一实施例中,所述方法还包括:
7、获取所述内腔镜当前位置和目标位置的信息;
8、根据所述当前位置和目标位置的信息,确定出从当前位置到目标位置的运动轨迹;
9、通过所述手势的运动方向通过所述手势的运动方向控制所述内腔镜按照所述运动轨迹运动。
10、在一实施例中,所述通过所述手势的运动方向控制所述内腔镜按照所述运动轨迹运动之后,包括:
11、根据姿态传感器和位置传感器监测所述内腔镜的运动轨迹,并将监测数据输出,用于用户根据所述输出数据调整手势;
12、其中,所述姿态传感器用于监测所述内腔镜的旋转角度和倾斜角度,所述位置传感器用于监测所述内腔镜的位置。
13、在一实施例中,所述控制内腔镜按照所述手势的运动方向运动,包括:
14、根据预先设定的步进距离,控制所述内腔镜按照所述手势运动方向运动。
15、在一实施例中,所述根据所述加速度信息,确定手势的运动方向,包括:
16、从所述加速度信息中提取加速度方向信息;
17、根据所述加速度方向信息,通过机器学习算法确定所述手势的运动方向。
18、在一实施例中,所述控制内腔镜按照所述手势的运动方向运动,包括:
19、当所述手势前后移动时,通过控制第一电机的转速和转向,控制内腔镜蛇骨结构的前后移动;
20、当所述手势左右移动时,通过控制第二电机的转速和转向,控制内腔镜蛇骨结构的左右移动;
21、当所述手势上下移动时,通过控制第三电机的转速和转向,控制内腔镜蛇骨结构的上下移动。
22、在一实施例中,所述控制内腔镜按照所述手势的运动方向运动之后,包括:
23、判断所述内腔镜是否按照所述手势运动方向运动;
24、若所述内腔镜未按照所述手势运动方向运动,则触发异常处理机制,所述异常处理机制包括声音或光报警。
25、一种内腔镜,包括加速度传感器、蛇骨结构、主控单元和手势控制单元;
26、所述手势控制单元用于接收所述加速度传感器采集的手势信息,并发送至所述主控单元,其中,所述手势信息包括加速度信息,所述加速度信息包括加速度的大小;
27、所述主控单元用于接收所述手势控制单元发送的手势信息,并根据所述加速度信息,确定手势的运动方向;
28、所述主控单元还用于将所述加速度的大小与预设加速度阈值进行对比,若所述加速度的大小大于所述预设加速度阈值,则控制所述内腔镜蛇骨结构按照所述手势的运动方向运动。
29、一种医疗设备,包括权利要求8所述的内腔镜。
30、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项内腔镜控制方法。
31、上述一种内腔镜控制方法、内腔镜、医疗设备及存储介质,通过加速度传感器采集手势信息,包括手势运动的加速度信息,其中加速度信息包括加速度的大小,并对这些加速度信息进行处理以确定手势的运动方向。然后将加速度的大小与预设的加速度阈值进行对比,如果加速度的大小大于预设阈值,则控制内腔镜按照手势的运动方向运动。本发明通过上述方案解决了传统的手柄式操作方式导致医务人员的操作疲劳的技术问题,使医务人员操作更加便捷,精度更高。
技术特征:
1.一种内腔镜控制方法,其特征在于,所述方法包括:
2.如权利要求1所述的内腔镜控制方法,所述方法还包括:
3.如权利要求2所述的内腔镜控制方法,其特征在于,所述通过所述手势的运动方向控制所述内腔镜按照所述运动轨迹运动之后,包括:
4.如权利要求1所述的内腔镜控制方法,其特征在于,所述控制内腔镜按照所述手势的运动方向运动,包括:
5.如权利要求1所述的内腔镜控制方法,其特征在于,所述根据所述加速度信息,确定手势的运动方向,包括:
6.如权利要求1所述的内腔镜控制方法,其特征在于,所述控制内腔镜按照所述手势的运动方向运动,包括:
7.如权利要求1所述的内腔镜控制方法,其特征在于,所述控制内腔镜按照所述手势的运动方向运动之后,包括:
8.一种内腔镜,其特征在于,包括加速度传感器、蛇骨结构、主控单元和手势控制单元;
9.一种医疗设备,包括权利要求8所述的内腔镜。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的内腔镜控制方法。
技术总结
本发明公开了一种内腔镜控制方法、内腔镜、医疗设备及存储介质,方法包括:获取手势信息,所述手势信息通过加速度传感器采集得到,所述手势信息包括加速度信息,所述加速度信息包括加速度的大小;根据所述加速度信息,确定手势的运动方向,并将所述加速度的大小与预设加速度阈值进行对比;若所述加速度的大小大于所述预设加速度阈值,则控制内腔镜按照所述手势的运动方向运动。本发明通过上述方案解决了传统的手柄式操作方式导致医务人员的操作疲劳的技术问题,使医务人员操作更加便捷,精度更高。
技术研发人员:梁锦兴,谭晓亮,张俊帆,江涛
受保护的技术使用者:深圳市安保医疗科技股份有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!