一种下肢外骨骼的控制方法和系统、电子设备及存储介质与流程
本申请涉及脑机接口,尤其涉及一种下肢外骨骼的控制方法和系统、电子设备及存储介质。
背景技术:
1、脑-机接口(brain computer interface,bci)是一种人机交互方式。然而目前大部分脑机接口技术研究还处在实验室研究的水平,仍面临着许多问题和挑战:1)多控制指令的脑机接口系统识别精度低;2)bci系统缺乏应对错误事件有效处理手段等问题,使得bci系统在实际应用中受到了严重的限制。因此,亟需设计更加有效的识别方法与纠错机制,以解决脑机接口技术针对下肢外骨骼的控制准确性不高的问题。
技术实现思路
1、本申请实施例的主要目的在于提出一种下肢外骨骼的控制方法和系统、电子设备及存储介质,旨在提高对下肢外骨骼的控制准确性。
2、为实现上述目的,本申请实施例的第一方面提出了一种下肢外骨骼的控制方法,所述方法包括:
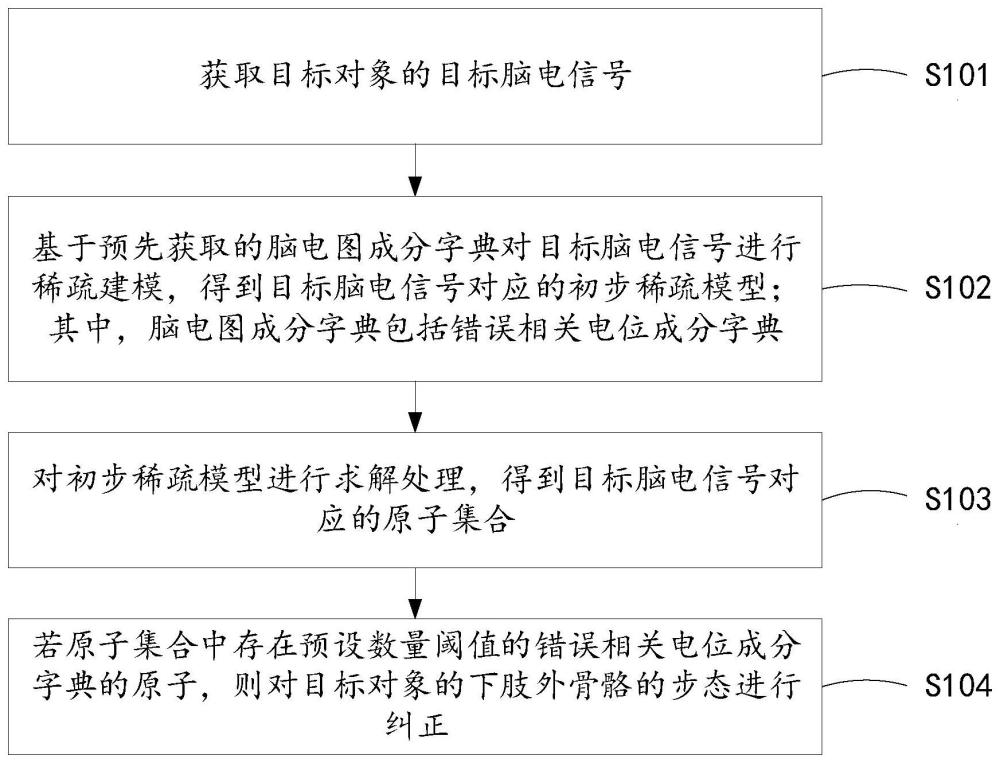
3、获取目标对象的目标脑电信号;
4、基于预先获取的脑电图成分字典对所述目标脑电信号进行稀疏建模,得到所述目标脑电信号对应的初步稀疏模型;其中,所述脑电图成分字典包括错误相关电位成分字典;
5、对所述初步稀疏模型进行求解处理,得到所述目标脑电信号对应的原子集合;
6、若所述原子集合中存在预设数量阈值的错误相关电位成分字典的原子,则对目标对象的下肢外骨骼的步态进行纠正。
7、在一些实施例,所述脑电图成分字典还包括自发成分字典;
8、所述脑电图成分字典通过以下方式构建:
9、获取自发脑电信号,并基于所述自发脑电信号进行字典构建,得到自发成分字典;其中,自发脑电信号是不包括错误相关电位信号的脑电信号;
10、获取错误相关电位信号,并基于所述自发成分字典对所述错误相关电位信号进行稀疏表示,得到稀疏系数向量;
11、基于所述稀疏系数向量、所述自发成分字典、和所述错误相关电位信号进行重构误差计算,得到误差;
12、对所述误差进行最小化处理,得到错误相关电位成分字典;
13、基于所述自发成分字典和所述错误相关电位成分字典构建所述脑电图成分字典。
14、在一些实施例,所述基于预先获取的脑电图成分字典对所述目标脑电信号进行稀疏建模,得到所述目标脑电信号对应的初步稀疏模型,包括:
15、获取所述脑电图成分字典的原子数量;
16、基于所述原子数量对所述目标脑电信号进行稀疏建模,得到所述初步稀疏模型。
17、在一些实施例,所述对所述初步稀疏模型进行求解处理,得到所述目标脑电信号对应的原子集合,包括:
18、基于预设的优化目标函数、和预设的迭代优化函数对所述初步稀疏模型进行求解处理,得到目标稀疏模型;
19、对所述目标稀疏模型进行分析,得到所述目标脑电信号对应的原子集合。
20、在一些实施例,所述对目标对象的下肢外骨骼的步态进行纠正,包括:
21、获取所述目标对象的当前步态;其中,所述当前步态包括双腿并排站立、左脚在前、右脚在前、待左转、待右转中的一种;
22、若所述当前步态为所述待左转,则将所述当前步态更新为所述待右转;
23、若所述当前步态为所述待右转,则将所述当前步态更新为所述待左转;
24、若所述当前步态为所述左脚在前或所述右脚在前,则将所述当前步态更新为所述双腿并排站立。
25、在一些实施例,所述获取目标对象的目标脑电信号,包括:
26、采集目标对象的原始脑电信号;
27、对所述原始脑电信号进行参考转换处理,得到第一脑电信号;
28、对所述第一脑电信号进行伪迹去除处理,得到第二脑电信号;
29、获取所述第二脑电信号对应的事件点,并获取所述事件点前的第一预设时长的数据,以及所述事件点后的第二预设时长的数据;
30、基于所述第一预设时长的数据对所述第二预设时长的数据进行校正,得到所述目标脑电信号。
31、在一些实施例,在所述采集目标对象的原始脑电信号之前,所述方法还包括:
32、确定待采集的脑电电极位置;
33、为待采集的原始脑电信号设置采样率和滤波参数。
34、为实现上述目的,本申请实施例的第二方面提出了一种下肢外骨骼的控制系统,所述系统包括:
35、信号采集模块,用于获取目标对象的目标脑电信号;
36、稀疏建模模块,用于基于预先获取的脑电图成分字典对所述目标脑电信号进行稀疏建模,得到所述目标脑电信号对应的稀疏模型;其中,所述脑电图成分字典包括错误相关电位成分字典;
37、模型求解模块,用于对所述稀疏模型进行求解处理,得到所述目标脑电信号对应的字典原子;
38、步态纠正模块,用于若所述字典原子中存在预设数量阈值的错误相关电位成分字典的原子,则对目标对象的下肢外骨骼的步态进行纠正。
39、为实现上述目的,本申请实施例的第三方面提出了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的方法。
40、为实现上述目的,本申请实施例的第四方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的方法。
41、本申请提出的下肢外骨骼的控制方法和系统、电子设备及存储介质,其通过获取目标对象的目标脑电信号,能够为监测错误相关电位成分提供数据基础。进一步地,基于预先获取的脑电图成分字典对目标脑电信号进行稀疏建模,得到目标脑电信号对应的稀疏模型,能够通过稀疏建模,将脑电信号表示为字典原子的线性组合,提取出目标脑电信号的重要特征。进一步地,对稀疏模型进行求解处理,得到目标脑电信号对应的字典原子,能够获得目标脑电信号对应的字典原子权重,进一步细化对目标脑电信号的描述。进一步地,若字典原子中存在预设数量阈值的错误相关电位成分字典的原子,则对目标对象的下肢外骨骼的步态进行纠正,通过检测目标脑电信号对应的字典原子是否存在错误相关电位成分,以判断是否需要对步态进行纠正。这一方式通过纠正下肢外骨骼的步态,提高控制准确性。
技术特征:
1.一种下肢外骨骼的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的下肢外骨骼的控制方法,其特征在于,所述脑电图成分字典还包括自发成分字典;
3.根据权利要求1所述的下肢外骨骼的控制方法,其特征在于,所述基于预先获取的脑电图成分字典对所述目标脑电信号进行稀疏建模,得到所述目标脑电信号对应的初步稀疏模型,包括:
4.根据权利要求1所述的下肢外骨骼的控制方法,其特征在于,所述对所述初步稀疏模型进行求解处理,得到所述目标脑电信号对应的原子集合,包括:
5.根据权利要求1所述的下肢外骨骼的控制方法,其特征在于,所述对目标对象的下肢外骨骼的步态进行纠正,包括:
6.根据权利要求1-5任一项所述的下肢外骨骼的控制方法,其特征在于,所述获取目标对象的目标脑电信号,包括:
7.根据权利要求6所述的下肢外骨骼的控制方法,其特征在于,在所述采集目标对象的原始脑电信号之前,所述方法还包括:
8.一种下肢外骨骼的控制系统,其特征在于,所述系统包括:
9.一种电子设备,其特征在于,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现权利要求1至7任一项所述的一种下肢外骨骼的控制方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的一种下肢外骨骼的控制方法。
技术总结
本申请提供了一种下肢外骨骼的控制方法和系统、电子设备及存储介质,属于脑机接口技术领域。该方法包括:获取目标对象的目标脑电信号;基于预先获取的脑电图成分字典对目标脑电信号进行稀疏建模,得到目标脑电信号对应的初步稀疏模型;其中,脑电图成分字典包括错误相关电位成分字典;对初步稀疏模型进行求解处理,得到目标脑电信号对应的原子集合;若原子集合中存在预设数量阈值的错误相关电位成分字典的原子,则对目标对象的下肢外骨骼的步态进行纠正。本申请能够提高对下肢外骨骼的控制准确性。
技术研发人员:薄洪健,郭志,林汝扬
受保护的技术使用者:深圳航天科技创新研究院
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!