一种康复机器人及其控制方法
本发明属于康复器械,具体涉及一种康复机器人及其控制方法。
背景技术:
1、下半身瘫痪常见于脊髓损伤、髓内肿瘤等疾病,表现为双下肢出现不同程度的运动障碍,在积极接受治疗的同时,还应使用康复机器人进行必要的康复训练,以防止肌肉萎缩,帮助患者尽快恢复。
2、在康复机器人的实际应用中,对于下肢存在运动障碍的患者,需要进行行走训练、坐姿态训练以及多角度躺姿态训练,现有的康复机器人因多功能模块之间的相互干扰,无法集下肢多姿态训练和轮椅床为一体,训练模式较为单一,无法根据患者的需要进行自适应状态调节。
技术实现思路
1、本发明的目的是克服现有技术中存在多功能模块之间相互干扰,不能自适应调节的缺陷,提供了能够自适应调节的一种的康复机器人及其控制方法。
2、本发明解决其技术问题所采用的技术方案是:
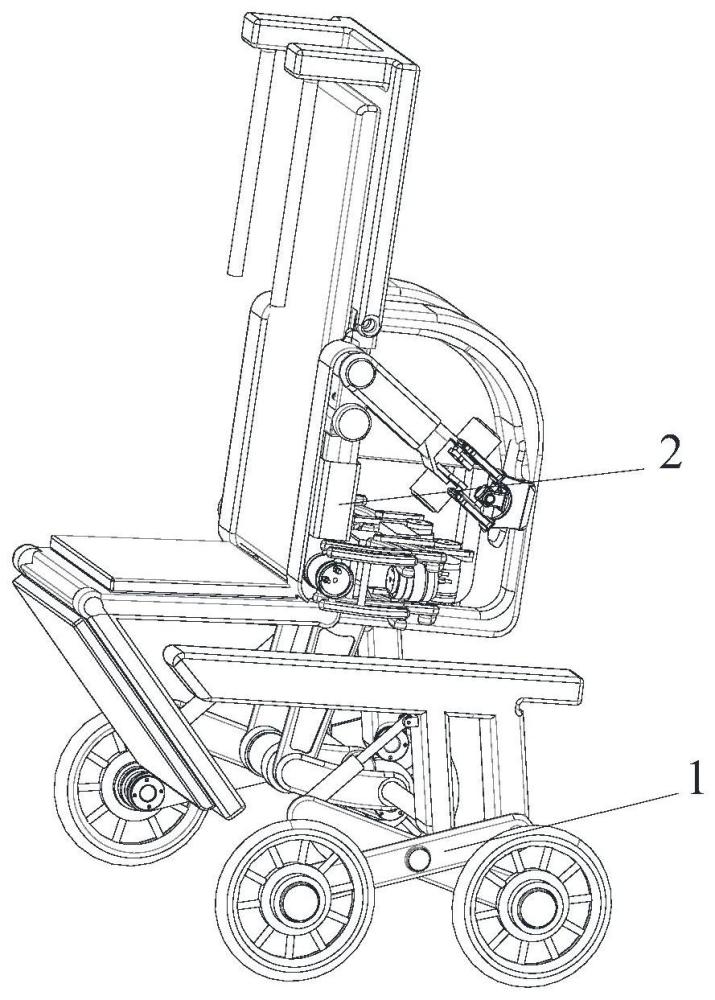
3、作为第一个方面,一种康复机器人,包括交叉联动式椅床机构和对称安装在所述交叉联动式椅床机构两侧的外骨骼康复机构;其中,
4、所述交叉联动式椅床机构包括:
5、两组交叉式轮毂组件,用以调整床架状态适应患者的姿态;
6、用于患者躺靠的靠板,通过翻转机构与两组所述交叉式轮毂组件连接;
7、所述翻转机构和所述外骨骼康复机构均固定安装在所述靠板的背面上;所述翻转机构用以适应患者的姿态;所述外骨骼康复机构用以对患者进行坐姿态、站姿态、半躺姿态、躺姿态状态下的下肢康复训练,所述外骨骼康复机构在不使用时,折叠在所述靠板的侧后方。
8、进一步地,所述靠板包括依次转动连接的腿板、座板以及背板,所述腿板与所述座板之间、所述座板与所述背板之间均设置有调角机构,用于调节所述腿板与所述座板之间、所述座板与所述背板之间的转动角度。
9、进一步地,所述翻转机构包括固定安装在所述背板背面上的翻转连杆、与所述翻转连杆转动安装的上支撑架以及与所述上支撑架端部转动连接的长轴;所述长轴远离所述上支撑架的端部与所述交叉式轮毂组件固定连接;其中,
10、所述翻转连杆上固定安装有第一翻转电机,所述第一翻转电机的输出端与所述上支撑架同轴设置;所述长轴上固定安装有第二翻转电机,所述第二翻转电机的输出轴与所述上支撑架同轴设置;
11、启动第一翻转电机,通过翻转连杆带动所述座板前后移动;启动第二翻转电机,通过上支撑架和翻转连杆带动所述座板上下移动。
12、进一步地,所述交叉式轮毂组件包括相互交叉设置的前轮架和后轮架;其中,
13、所述前轮架的一端安装有前轮,所述前轮架的另一端转动安装有床架;所述后轮架的一端安装有后轮,所述后轮架的另一端安装有用于调节所述床架转动的伸缩电机。
14、进一步地,所述外骨骼康复机构包括依次连接的髋关节康复组件、大腿康复组件、膝关节康复组件、小腿康复组件以及踝关节康复组件;其中,
15、所述髋关节康复组件包括:安装在所述靠板背面的安装架、固定安装在所述安装架上的侧抬电机、与所述侧抬电机的输出轴同轴设置的上层伸缩机构和下层伸缩机构、安装在所述上层伸缩机构和下层伸缩机构输出端前抬电机以及通过连接杆安装在所述上层伸缩机构上的旋转电机;所述上层伸缩机构与所述下层伸缩机构对称设置。
16、进一步地,所述上层伸缩机构和/或所述下层伸缩机构包括平行设置的第一连杆和第二连杆、与所述第一连杆远离所述安装架的一端转动安装的第三连杆、与所述第二连杆远离所述安装架的一端转动安装且与对应的第一连杆转动安装的第四连杆;
17、其中,
18、所述连接杆、第一连杆、第二连杆以及第四连杆围设成平
19、形四边形结构;所述旋转电机的输出端通过旋转连杆机构与所
20、述第二连杆的中部转动连接。
21、进一步地,所述膝关节康复组件包括安装在大腿康复组件上的膝关节电机、与所述膝关节电机的输出轴同轴设置的第一膝关节连杆、与所述第一膝关节连杆转动连接的第二膝关节连杆以及与所述第二膝关节连杆固定安装的凸轮;所述小腿康复组件上安装有与所述凸轮配合连接的变轴杆;
22、当启动所述膝关节电机,将位于所述大腿康复组件上的膝关节电机的转动变换成所述小腿康复组件绕所述凸轮的转动轴线转动。
23、进一步地,所述踝关节康复组件包括:
24、通过万向节与所述小腿康复组件转动安装的脚踏板;
25、第一脚踝电机和第二脚踝电机,相对安装在所述小腿康复组件上,均通过脚踝连杆机构安装在所述脚踏板的外侧上;
26、通过控制第一脚踝电机和第二脚踝电机的转动方向和转动角度,带动所述脚踏板进行内翻/外翻、前抬/后抬动作。
27、进一步地,所述脚踝连杆机构包括:
28、与所述第一脚踝电机和/或第二脚踝电机的输出轴同轴设置的脚踝输出块和与所述脚踝输出块转动连接的脚踝连杆;所述脚踝连杆远离所述脚踝输出块的端部与所述脚踏板的后跟转动安装;
29、所述第一脚踝电机对应的所述脚踝连杆安装在所述脚踏板的外边缘的前端,所述第二脚踝电机对应的所述脚踝连杆安装在所述脚踏板的外边缘的后端。
30、作为第二个方面,一种康复机器人的控制方法,包括以下步骤:
31、s1.初始化,即初始到坐姿态,患者坐在所述靠板上;
32、s2.选择训练模式,即根据患者的需要选择对应的站姿态、坐姿态、多角度躺姿态的训练模式;
33、s3.控制所述翻转机构、两组所述交叉式轮毂组件自适应患者的训练模式;即调整靠板的位置和转动角度,使得靠板转换为训练模式下对应的位置和角度;调整所述交叉式轮毂组件的姿态;
34、s4.将所述外骨骼康复机构由折叠状态变换为展开状态;即将折叠在所述靠板的侧后方的所述外骨骼康复机构展开到靠板的侧面;
35、s5.对患者进行对应的康复训练;即启动所述外骨骼康复机构对患者进行对应的康复训练;
36、s6.训练完成后,将所述交叉式轮毂组件变换为坐姿态状态或多角度躺姿态状态。
37、本发明的一种康复机器人的有益效果是:本发明打破常规的框式轮椅床的结构,采用特殊设计的交叉联动式椅床机构与外骨骼康复机构配合连接,仅仅通过翻转机构将靠板与两组交叉式轮毂组件连接,实现对患者进行坐姿态、站姿态、多角度躺姿态状态下的下肢康复训练,外骨骼康复机构在不使用时,折叠在靠板的侧后方,完全消除了对于椅床机构使用的影响。
技术特征:
1.一种康复机器人,其特征在于,包括交叉联动式椅床机构(1)和对称安装在所述交叉联动式椅床机构(1)两侧的外骨骼康复机构(2);其中,
2.根据权利要求1所述的一种康复机器人,其特征在于,所述靠板(12)包括依次转动连接的腿板(121)、座板(122)以及背板(123),所述腿板(121)与所述座板(122)之间、所述座板(122)与所述背板(123)之间均设置有调角机构(124),用于调节所述腿板(121)与所述座板(122)之间、所述座板(122)与所述背板(123)之间的转动角度。
3.根据权利要求2所述的一种康复机器人及其控制方法,其特征在于,所述翻转机构(13)包括固定安装在所述背板(123)背面上的翻转连杆(131)、与所述翻转连杆(131)转动安装的上支撑架(132)以及与所述上支撑架(132)端部转动连接的长轴(133);所述长轴(133)远离所述上支撑架(132)的端部与所述交叉式轮毂组件(11)固定连接;其中,
4.根据权利要求1所述的一种康复机器人及其控制方法,其特征在于,所述交叉式轮毂组件(11)包括相互交叉设置的前轮架(111)和后轮架(112);其中,
5.根据权利要求1所述的一种康复机器人,其特征在于,所述外骨骼康复机构(2)包括依次连接的髋关节康复组件(21)、大腿康复组件(22)、膝关节康复组件(23)、小腿康复组件(24)以及踝关节康复组件(25);其中,
6.根据权利要求5所述的一种康复机器人,其特征在于,所述上层伸缩机构(213)和/或所述下层伸缩机构(214)包括平行设置的第一连杆(2131)和第二连杆(2132)、与所述第一连杆(2131)远离所述安装架(211)的一端转动安装的第三连杆(2133)、与所述第二连杆(2132)远离所述安装架(211)的一端转动安装且与对应的第一连杆(2131)转动安装的第四连杆(2134);其中,
7.根据权利要求5所述的一种康复机器人,其特征在于,所述膝关节康复组件(23)包括安装在大腿康复组件(22)上的膝关节电机(231)、与所述膝关节电机(231)的输出轴同轴设置的第一膝关节连杆(232)、与所述第一膝关节连杆(232)转动连接的第二膝关节连杆(233)以及与所述第二膝关节连杆(233)固定安装的凸轮(234);所述小腿康复组件(24)上安装有与所述凸轮(234)配合连接的变轴杆(235);
8.根据权利要求5所述的一种康复机器人,其特征在于,所述踝关节康复组件(25)包括:
9.根据权利要求8所述的一种康复机器人,其特征在于,所述脚踝连杆机构(254)包括:
10.根据权利要求1-9任一项所述的一种康复机器人的控制方法,其特征在于,包括以下步骤:
技术总结
本发明属于康复器械技术领域,具体涉及一种康复机器人、使用方法及其控制方法。本发明包括交叉联动式椅床机构和对称安装在交叉联动式椅床机构两侧的外骨骼康复机构;其中,交叉联动式椅床机构包括:两组交叉式轮毂组件,用以调整床架状态适应患者的姿态;用于患者躺靠的靠板,通过翻转机构与两组交叉式轮毂组件连接;翻转机构和外骨骼康复机构均固定安装在靠板的背面上。本发明打破常规的框式轮椅床的结构,采用特殊设计的交叉联动式椅床机构与外骨骼康复机构配合连接,仅仅通过翻转机构将靠板与两组交叉式轮毂组件连接,实现对患者进行坐姿态、站姿态、多角度躺姿态状态下的下肢康复训练。
技术研发人员:冯永飞,王洪波,董芳艳,胡庆龙,郁龙,王飞,桑春晓,维拉达雷亚努·维克多,阿比盖尔·亚历克莎·波普,维拉达雷亚努·路易吉
受保护的技术使用者:宁波大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!