一种机器人自动巡检医疗设备的方法和装置与流程
本发明实施例涉及机器人控制,尤其涉及一种机器人自动巡检医疗设备的方法和装置。
背景技术:
1、医疗设备属于高精密的仪器,需要实时关注医疗设备的健康度和性能变化情况,因此需要频繁的对医疗设备进行巡检,检查医疗设备是否存在异常。
2、目前,主要通过人工巡检医疗设备,即给巡检人员下发任务,人工去固定的位置进行巡检。然而,实际环境中存在相当一部分的医疗设备处于灵活调度的场景,例如,由于部门需求不同、就诊人员转移等原因,需要频繁的移动医疗设备的位置。当待检测医疗设备处于灵活借调的情况时,巡检人员无法高效、灵活、自主的根据实际情况去动态巡检这些医疗设备,存在相当大的局限性,存在医疗设备巡检成本高、效率低的技术问题。
技术实现思路
1、本发明提供了一种机器人自动巡检医疗设备的方法和装置,以适应医疗设备灵活调度的应用场景,实现高效、低成本的智能化巡检过程。
2、第一方面,本发明实施例提供了一种机器人自动巡检医疗设备的方法,该方法包括:
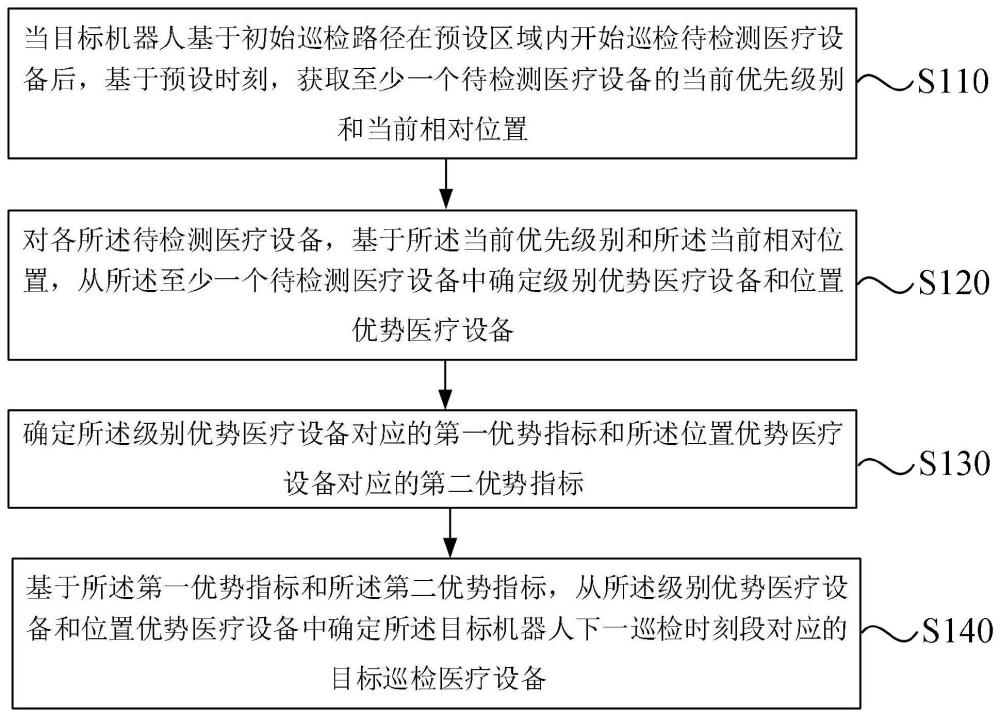
3、当目标机器人基于初始巡检路径在预设区域内开始巡检待检测医疗设备后,基于预设时刻,获取至少一个待检测医疗设备的当前优先级别和当前相对位置;
4、对各所述待检测医疗设备,基于所述当前优先级别和所述当前相对位置,从所述至少一个待检测医疗设备中确定级别优势医疗设备和位置优势医疗设备;
5、确定所述级别优势医疗设备对应的第一优势指标和所述位置优势医疗设备对应的第二优势指标;
6、基于所述第一优势指标和所述第二优势指标,从所述级别优势医疗设备和位置优势医疗设备中确定所述目标机器人下一巡检时刻段对应的目标巡检医疗设备。
7、第二方面,本发明实施例提供了一种机器人自动巡检医疗设备的装置,该装置包括:
8、当前信息获取模块,用于当目标机器人基于初始巡检路径在预设区域内开始巡检待检测医疗设备后,基于预设时刻,获取至少一个待检测医疗设备的当前优先级别和当前相对位置;
9、优势医疗设备确定模块,用于对各所述待检测医疗设备,基于所述当前优先级别和所述当前相对位置,从所述至少一个待检测医疗设备中确定级别优势医疗设备和位置优势医疗设备;
10、优势指标确定模块,用于确定所述级别优势医疗设备对应的第一优势指标和所述位置优势医疗设备对应的第二优势指标;
11、目标医疗设备确定模块,用于基于所述第一优势指标和所述第二优势指标,从所述级别优势医疗设备和位置优势医疗设备中确定所述目标机器人下一巡检时刻段对应的目标巡检医疗设备。
12、本发明实施例所提供的技术方案,当目标机器人基于初始巡检路径在预设区域内开始巡检待检测医疗设备后,基于预设时刻,获取至少一个待检测医疗设备的当前优先级别和当前相对位置,进而,对各待检测医疗设备,基于当前优先级别和当前相对位置,从至少一个待检测医疗设备中确定级别优势医疗设备和位置优势医疗设备,进一步的,确定级别优势医疗设备对应的第一优势指标和位置优势医疗设备对应的第二优势指标,从而,基于第一优势指标和第二优势指标,从级别优势医疗设备和位置优势医疗设备中确定目标机器人下一巡检时刻段对应的目标巡检医疗设备。本发明实施例的技术方案解决了现有技术中医疗设备巡检成本高、无法在医疗设备灵活调度的场景下进行高效巡检的技术问题,本发明通过机器人实现自动化智能巡检医疗设备的有益效果,在巡检的过程中,综合考虑待检测医疗设备的优先级别和相对位置关系,实时动态的调整下一个目标巡检医疗设备,可以适应医疗设备灵活调度的应用场景,应用范围广,适用性强,实现了高效、低成本的智能化巡检过程。
13、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种机器人自动巡检医疗设备的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述方法还包括:确定至少一个待检测医疗设备的当前优先级别;
4.根据权利要求3所述的方法,其特征在于,所述基于所述重要性比值矩阵,确定每个所述优先级影响维度对应的影响权重值,包括:
5.根据权利要求1所述的方法,其特征在于,所述方法还包括:确定至少一个待检测医疗设备的当前相对位置;
6.根据权利要求1所述的方法,其特征在于,所述基于所述当前优先级别和所述当前相对位置,从所述至少一个待检测医疗设备中确定级别优势医疗设备和位置优势医疗设备,包括:
7.根据权利要求1所述的方法,其特征在于,所述确定所述级别优势医疗设备对应的第一优势指标和所述位置优势医疗设备对应的第二优势指标,包括:
8.根据权利要求7所述的方法,其特征在于,所述基于所述第一默认初始权重、所述第二默认初始权重以及预设参考值确定函数,确定第一参考特征值和第二参考特征值,包括:
9.根据权利要求7所述的方法,其特征在于,所述目标优势函数为:
10.一种机器人自动巡检医疗设备的装置,其特征在于,该装置包括:
技术总结
本发明实施例公开了一种机器人自动巡检医疗设备的方法和装置,当目标机器人基于初始巡检路径在预设区域内巡检待检测医疗设备后,基于预设时刻,获取多个待检测医疗设备的当前优先级别和当前相对位置;基于当前优先级别和当前相对位置,从多个待检测医疗设备中确定级别优势医疗设备和位置优势医疗设备;确定级别优势医疗设备的第一优势指标和位置优势医疗设备的第二优势指标;基于第一优势指标和第二优势指标,确定目标机器人下一巡检时刻段对应的目标巡检医疗设备。本发明综合考虑待检测医疗设备的优先级别和相对位置关系,实时动态的调整下一个目标巡检医疗设备,可以适应医疗设备灵活调度的应用场景,实现了高效、低成本的智能化巡检过程。
技术研发人员:王国亚,邓欣欣,马如明,胡值彬,李雄雄,陈静丽
受保护的技术使用者:南京天溯自动化控制系统有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!