一种基于神经网络和鲁棒约束跟随的髋部外骨骼助行方法与流程
本发明涉及机器人控制,具体为一种基于神经网络和鲁棒约束跟随的髋部外骨骼助行方法。
背景技术:
1、由于老年人随着年龄的增长,自身的生理机能开始衰退,导致一些老年人出现包括平衡能力差、下肢肌肉无力、肢体应变功能下降等缺陷,从而导致行走困难的问题。随着生活水平的提升,防滑措施和生活环境的改善使得滑倒和绊倒的概率大大降低,但是由于平衡能力和肌肉力量的减弱,老年人在水平地面行走时依然面临着跌倒的风险。众多的助行器、下肢外骨骼机器人在老年人生活中发挥着巨大的作用,然而现有的助行器和下肢外骨骼机器人存在体积大而笨重、人机交互性能差、功能有限等缺点,而髋部助老外骨骼机器人以其功能灵活和轻巧便携的特点,已在老年人助行方面崭露头角。基于上述,于是,有鉴于此,针对现有的结构予以研究改良,提供一种基于神经网络和鲁棒约束跟随的髋部外骨骼助行方法,以期达到更具有实用价值性的目的。
技术实现思路
1、为了解决上述技术问题,本发明提供了如下的技术方案:
2、本发明一种基于神经网络和鲁棒约束跟随的髋部外骨骼助行方法,包括以下几个步骤:
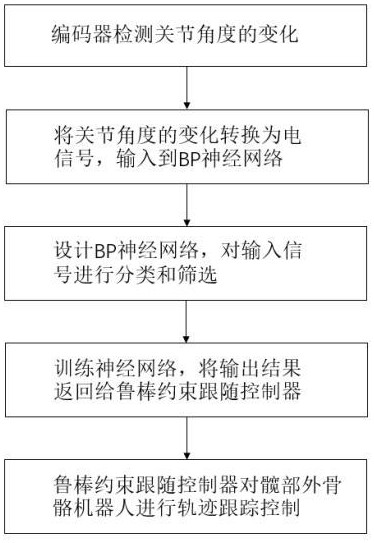
3、步骤一:编码器检测关节角度的变化;
4、步骤二:将关节角度的变化转换为电信号,输入到bp神经网络;
5、步骤三:设计bp神经网络,对输入信号进行分类和筛选;
6、步骤四:训练神经网络,将输出结果返回给鲁棒约束跟随控制器;
7、步骤五:鲁棒约束跟随控制器对髋部外骨骼机器人进行轨迹跟踪控制。
8、作为本发明的一种优选技术方案,所述编码器在左右髋部各一个,会检测关节角度的变化,如果角度变大(腿向前迈),则输出低电平,如果角度变小(退向后退)或不变(原地不动),则输出高电平。
9、作为本发明的一种优选技术方案,所述bp神经网络起源于bp算法,bp算法包括信息的前向传播和误差的后向传播两部分,通过信息的前向传播和误差的反向传播,不断调整神经元之间的权值,以减小期望输出与实际输出之间的误差,达到训练样本的目的。
10、作为本发明的一种优选技术方案,所述步骤五神经网络输出的信号作为输入,输入到该鲁棒控制器中。
11、作为本发明的一种优选技术方案,所述步骤五鲁棒控制器主要包括标称部分和不确定部分,标称部分用于解决系统不确定性已知或不已知的情况,不确定部分用于解决系统不确定性未知或存在的情况,该控制器可以实现对轨迹的跟踪控制,并且具有很高的精度和良好的跟踪性能。
12、本发明的有益效果是:
13、编码器检测关节角度的变化;将关节角度的变化转换为电信号,输入到bp神经网络;设计bp神经网络,对输入信号进行分类和筛选;训练神经网络,将输出结果返回给鲁棒约束跟随控制器;鲁棒约束跟随控制器对髋部外骨骼机器人进行轨迹跟踪控制。该控制方法能够在系统判断关节角度变化时快速正确的做出决策,具有自学习性、可靠性高的特点,有效改善了助行效果,为机器人行业提供了极大的便利,具有较高的实用价值。
技术特征:
1.一种基于神经网络和鲁棒约束跟随的髋部外骨骼助行方法,其特征在于,包括以下几个步骤:
2.根据权利要求1所述的一种基于神经网络和鲁棒约束跟随的髋部外骨骼助行方法,其特征在于,所述编码器在左右髋部各一个,会检测关节角度的变化,如果角度变大(腿向前迈),则输出低电平,如果角度变小(退向后退)或不变(原地不动),则输出高电平。
3.根据权利要求1所述的一种基于神经网络和鲁棒约束跟随的髋部外骨骼助行方法,其特征在于,所述bp神经网络起源于bp算法,bp算法包括信息的前向传播和误差的后向传播两部分,通过信息的前向传播和误差的反向传播,不断调整神经元之间的权值,以减小期望输出与实际输出之间的误差,达到训练样本的目的。
4.根据权利要求1所述的一种基于神经网络和鲁棒约束跟随的髋部外骨骼助行方法,其特征在于,所述步骤五神经网络输出的信号作为输入,输入到该鲁棒控制器中。
5.根据权利要求1所述的一种基于神经网络和鲁棒约束跟随的髋部外骨骼助行方法,其特征在于,所述步骤五鲁棒控制器主要包括标称部分和不确定部分,标称部分用于解决系统不确定性已知或不已知的情况,不确定部分用于解决系统不确定性未知或存在的情况,该控制器可以实现对轨迹的跟踪控制,并且具有很高的精度和良好的跟踪性能。
技术总结
本发明公开了一种基于神经网络和鲁棒约束跟随的髋部外骨骼助行方法,包括编码器检测关节角度的变化;将关节角度的变化转换为电信号,输入到BP神经网络;设计BP神经网络,对输入信号进行分类和筛选;训练神经网络,将输出结果返回给鲁棒约束跟随控制器;鲁棒约束跟随控制器对髋部外骨骼机器人进行轨迹跟踪控制,该控制方法能够在系统判断关节角度变化时快速正确的做出决策,具有自学习性、可靠性高的特点,有效改善了助行效果,为机器人行业提供了极大的便利。
技术研发人员:马风雷,岳兴忠,张明星,赵中乐,孙守兵,刘豪华
受保护的技术使用者:合肥中科深谷科技发展有限公司
技术研发日:
技术公布日:2024/5/29
- 还没有人留言评论。精彩留言会获得点赞!