一种非正交设计的肩关节五自由度等速肌力评估与康复平台
本发明涉及等速肌力评估及关节康复器械,尤其涉及一种非正交设计的肩关节五自由度等速肌力评估与康复平台。
背景技术:
1、外骨骼康复训练系统是一种应用机器人技术的康复训练辅助工具,用于帮助康复者进行康复运动和功能恢复。它通过机器人装置提供力量支持和运动辅助,以增强康复者的肌肉力量和运动能力。外骨骼康复装置不仅减少了理疗师的工作量,节约康复成本,还能够提供客观数据,评价康复者的康复进度,方便理疗师制定合理的康复策略。
2、随着等速运动概念的提出以及等速仪器的问世,等速肌力训练技术逐渐应用于运动医学及康复医学领域,并且有着广泛的应用前景。等速肌力训练技术是指在等速运动的基础上,通过使用等速仪器来进行肌力训练的一种方法。在等速肌力训练中,运动速度是恒定的,而阻力可以根据需要进行调整。受试者按照预设的肢体运动速度进行训练,等速仪器的力矩输出会随着肌肉张力的增加或减少而变化,以确保肢体不能产生运动的加速度。等速肌力仪可以评估和康复具有运动功能障碍人群,同时也可以辅助运动员训练。
3、等速肌力仪具有等速、等长、等张、向心、离心训练模式,其中等速训练模式下可保证关节康复安全性,提高肌力评估的准确性。常用的测试参数有:峰力矩,峰力矩角度,平均功率,肌肉总作功等。传统等速肌力仪采用单关节单自由度评估和康复策略,针对人体不同关节运动,需要加装机械适配器,实现单一范式的评估和康复运动。这种设计只能满足特定关节的训练需求,而多关节等速肌力仪能够实现多关节、多自由度的评估和康复功能,为更综合的训练提供了可能性。
4、肩关节是人体上肢中关节结构较为复杂的复合关节,包含盂肱,肩锁,胸锁,肩胛骨等关节,是人体中活动范围最大、运动形式最多的关节。肩关节的运动形式有:内旋、外旋、外展,内收、向前向后向上伸展、向前向后回旋。从人体的肌肉与骨骼结构上,人体肩复合关节实际上是由三自由度的盂肱球窝关节与两自由度的肩锁、胸锁关节等部位组合成的。其中肩锁、胸锁完成骨骼的上抬下降与前伸后缩。传统外骨骼式康复训练机器人使用球窝关节来提供肩部的三个自由度运动,忽略了肩胛带的运动。然而肩胛带的角色非常重要,它们将肩胛骨与身体骨骼连接起来,并影响着肩部的解剖结构和运动范围。如果不考虑肩胛带的运动,会导致人机关节轴失配,增加用户肩部受伤或损伤的风险,所以外骨骼式康复训练机器人的运动学结构必须考虑肩胛带的运动。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是传统的单关节单自由度等速仪康复和评估范式单一,无法全面地考虑到其他关节代偿的情况;且只使用三个自由度模拟球窝关节未考虑实际运动的组合情况。
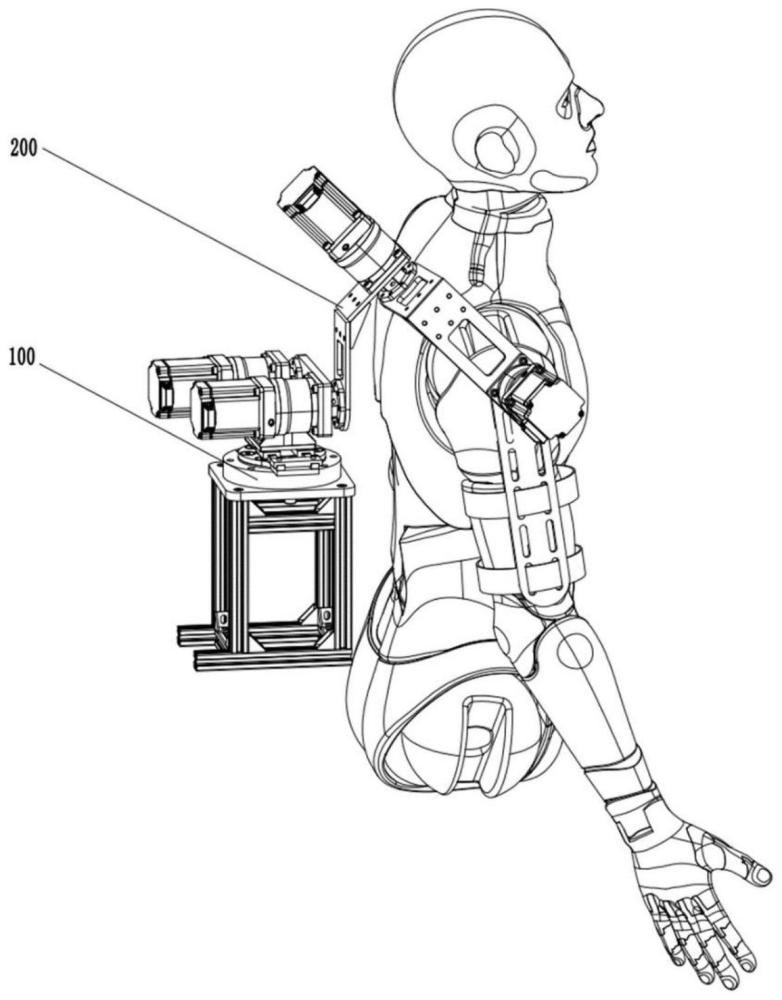
2、为实现上述目的,本发明提供了一种非正交设计的肩关节五自由度等速肌力评估与康复平台由四个主动自由度和一个被动自由度组成五自由度,包括二自由度肩锁、胸锁关节和三自由度盂肱球窝关节;二自由度肩锁、胸锁关节主要包括回转支承轴承、导轨、滑块、第一关节伺服电机、第一电机座、第一减速器、联轴器;三自由度盂肱球窝关节主要包括第二至第四关节伺服电机、第二至第四电机座、第二至第四减速器、联轴器和大臂固定板;
3、主动自由度由关节伺服电机和减速器完成,被动自由度由回转支承轴承、导轨和滑块完成;二自由度肩锁、胸锁关节与三自由度盂肱球窝关节通过紧固件连接,实现肩关节内收外展、旋内旋外和伸展屈曲多自由度多种范式的肌力评估和康复训练。
4、进一步地,二自由度肩锁、胸锁关节包括前伸后缩的被动自由度和上抬下降的主动自由度,两个自由度组成一对相互垂直且与人体关节相互平行的坐标系,实现肩胛带运动的模拟,前伸后缩的被动自由度由回转支承轴承和导轨、滑块被动实现,上抬下降的主动自由度由第一关节伺服电机和第一减速器主动实现,第一关节伺服电机和第一减速器通过紧固件连接。
5、进一步地,二自由度肩锁、胸锁关节的前伸后缩的被动自由度,通过回转支承轴承的回转运动和导轨滑块的直线运动合成代替,导轨和滑块设置于回转支承轴承上,与锁骨平行,根据人体的运动范围限制滑块的运动范围,使二自由度肩锁、胸锁关节在旋转的同时能够始终保证三自由度盂肱球窝关节原点与三个自由度的第二至第四关节伺服电机转轴的交点重合。
6、进一步地,对于二自由度肩锁、胸锁关节的上抬下降的主动自由度,通过针对性的对不同患者进行第二电机座的尺寸设计,保证二自由度肩锁、胸锁关节进行回转时,第二电机座与人体肩锁部位保持近似相对静止。
7、进一步地,二自由度肩锁、胸锁关节还包括基座,导轨底座,两个第一电机座支撑肋板;基座由合金型材、合金型材角码、滑动螺母组成,两个第一电机座支撑肋板通过紧固件将第一电机座夹紧,保证第一电机座上层的机构的稳定性。
8、进一步地,三自由度盂肱球窝关节为非正交基的结构设计,在人正常站立时以人体肩关节球窝作为原点,以水平面内相互垂直的一组向量为x轴、y轴,以与重力方向夹角45°的向量为z轴建立空间三维非正交坐标系,电机轴与坐标轴重合,故第二至第四关节伺服电机轴线呈两组正交,一组夹角45°的关系。
9、进一步地,三自由度盂肱球窝关节还包括第二输出板、第三输出板;第二至第四关节伺服电机采用串联设计,第二关节伺服电机输出端连接第二输出板与第三电机座,第二输出板与第三电机座成135°夹角;第三关节伺服电机输出端连接第三输出板与第四电机座,第三输出板与第四电机座成90°夹角;第四关节伺服电机输出端连接大臂固定板。
10、进一步地,第一至第四减速器前端的凸台都嵌入对应的第一至第四电机座的孔内,保证同心度和安装精度。
11、进一步地,第一至第四减速器采用联轴器输出,联轴器固定侧与联轴器变形侧两部分通过紧固件相连,利用对减速器输出轴的压紧力,通过摩擦力带动负载工作,同时紧固件通过负载的孔拧入减速器输出轴中,防止联轴器的轴向窜动。
12、进一步地,大臂固定板上设有用于固定人体与装置的绑带,大臂固定板在不同位置有用于固定绑带的直槽孔,用于适配不同人群,可根据需要调节绑带的位置,满足不同人群的需求。
13、与现有技术相比,本发明的有益效果:本发明解决传统的单关节单自由度等速仪康复和评估范式单一的问题。通过各执行器的配合,不需要更换机械适配器即可实现肩关节内收外展、旋内旋外和伸展屈曲多自由度多种范式的肌力评估和康复训练。同时充分考虑了肩关节肩胛带的运动,将人体肩锁、胸锁关节近似于两自由度模型,分别对应肩锁、胸锁部位的前伸后缩与上抬下降,其中前伸后缩自由度由回转支承轴承回转运动和滑块、导轨直线运动组合替代,为被动自由度。其中上抬下降自由度由电机主动实现,为主动自由度。由此方法避免了传统肩关节康复外骨骼自由度不够导致的使用者损伤的问题,降低实际过程中机械主体与人体的运动干涉的可能性。对于肩关节中的三自由度盂肱球窝关节采用非正交设计,以人正常站立时以人体肩关节球窝作为原点建立非正交参考系,节省所占空间体积,降低整体装置重心,减小机构自重对控制的影响。通过此种设计,提高对关节肌力评估的准确性和康复的效率。
14、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
- 还没有人留言评论。精彩留言会获得点赞!