末端夹持装置的制作方法
本技术涉及医疗器械,尤其涉及一种末端夹持装置。
背景技术:
1、种牙手术是在狭小的空间内局部麻醉下的精密操作,由于口腔的非直视环境、操作空间狭小以及医生缺乏经验等因素,造成手术的失败率较高,口腔种牙机器人应运而生,利用机器人精准、灵活、微创的特点,提高种植精度与效果。种植手机是口腔种牙手术中用来对颌骨钻孔、制备种植体窝洞的工具。其工作原理是以马达提供动力,通过内部传动机构带动种植手机末端的牙科车针完成对牙体的钻磨等操作。
2、种植手机的外轮廓面为曲面,形状不规则,则需要额外的夹持装置将其安装固定在手术机器人末端,现有技术中的夹持装置很难提供稳定可靠的固定,将会对种植体植入的精度造成很大的影响。
3、因此,如何提供一种末端夹持装置,是本领域技术人员亟需解决的问题。
技术实现思路
1、本实用新型提供一种末端夹持装置,用以解决现有技术中的末端夹持装置不能够实现可靠固定的缺陷,实现避免因末端夹持装置影响种植体的种植精度。
2、本实用新型提供一种末端夹持装置,用于连接机器人末端和种植手机,包括:
3、法兰,与所述机器人末端连接;
4、马达套筒,套设于所述种植手机的马达的外周,所述马达套筒的侧壁向外具有延伸部;
5、连接组件,一端与所述法兰远离所述机器人末端的一端连接,另一端与所述延伸部连接;且所述延伸部的轴线与所述法兰的轴线互相垂直;
6、第一锁紧件,贯穿所述延伸部,且将所述连接组件和所述马达套筒锁紧固定。
7、根据本实用新型提供的一种末端夹持装置,还包括力传感器,所述力传感器设置于所述法兰和所述连接组件之间,所述力传感器用于感知机器人钻孔时的操作力和力矩。
8、根据本实用新型提供的一种末端夹持装置,所述连接组件包括:
9、第一连接件,与所述法兰连接;
10、第二连接件,一端与所述第一连接件连接,另一端与所述延伸部连接。
11、根据本实用新型提供的一种末端夹持装置,所述连接组件还包括第三连接件,所述第三连接件设置于所述第一连接件和所述力传感器之间,且所述第三连接件由绝缘材质制成,与所述第一连接件螺纹连接。
12、根据本实用新型提供的一种末端夹持装置,所述第一连接件包括:
13、连接本体,与所述第三连接件连接;
14、中空连接轴,与所述连接本体同轴设置,且所述连接轴的侧壁上开设有第一连接孔;
15、所述第二连接件包括:
16、环形部,套设于所述中空连接轴处,且所述环形部的侧壁上设置有第二连接孔;
17、过渡部,与所述环形部连接;
18、套筒连接部,设置于所述过渡部远离所述环形部的一端;且所述套筒连接部的轴线与所述环形部的轴线互相垂直;
19、第二锁紧件贯穿所述第一连接孔和所述第二连接孔。
20、根据本实用新型提供的一种末端夹持装置,所述第二锁紧件的其中一端设置为锥形,用于实现第一连接件和第二连接件的锁紧。
21、根据本实用新型提供的一种末端夹持装置,所述第一连接件还包括限位部,所述限位部的延伸方向与所述中空连接轴的轴线相平行,且所述限位部上开设有与所述第一连接孔对应的螺纹孔,所述第二锁紧件贯穿所述螺纹孔实现锁紧。
22、根据本实用新型提供的一种末端夹持装置,所述套筒连接部的外周均匀分布有多个齿状凹槽,所述延伸部的端部设置有齿状凸起,所述齿状凸起与其中一个所述齿状凹槽配合。
23、根据本实用新型提供的一种末端夹持装置,还包括机头锁紧件,所述机头锁紧件与所述马达套筒螺纹连接,且所述机头锁紧件与机头之间还设置有垫圈。
24、根据本实用新型提供的一种末端夹持装置,所述马达套筒与所述延伸部相对的侧壁上开设有观察槽。
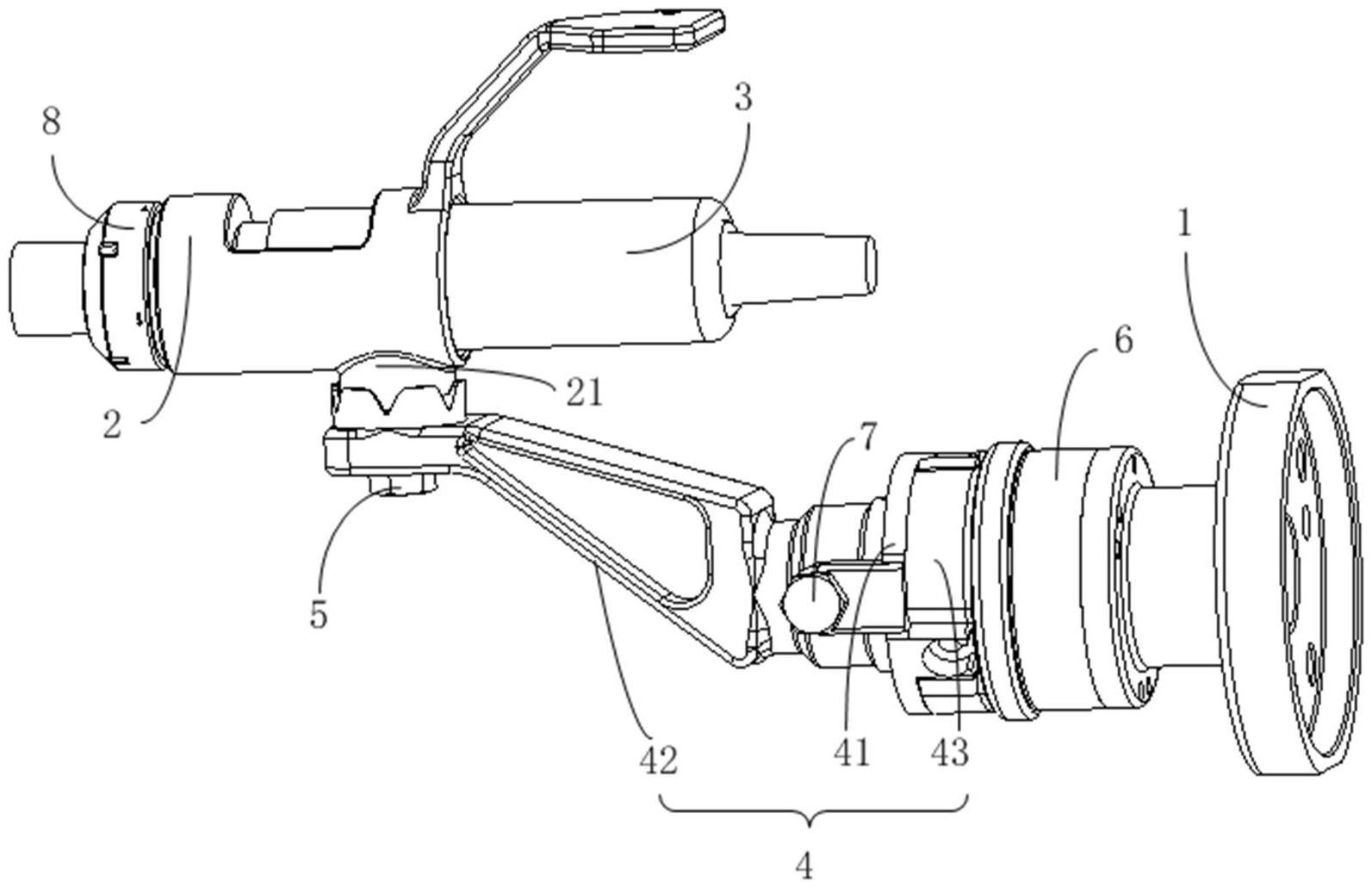
25、本实用新型提供的末端夹持装置,通过法兰与机器人末端连接,马达套筒套设于种植手机的马达的外周,马达套筒的侧壁向外具有延伸部;连接组件一端与法兰连接,另一端与延伸部连接,第一锁紧件贯穿延伸部,将连接组件、马达套筒和马达锁紧固定,延伸部的轴线与法兰的轴线互相垂直,能够实现马达与机器人末端的牢固固定,提高种植体的种植精度。
技术特征:
1.一种末端夹持装置,用于连接机器人末端和种植手机,其特征在于,包括:
2.根据权利要求1所述的末端夹持装置,其特征在于,还包括力传感器(6),所述力传感器(6)设置于所述法兰(1)和所述连接组件(4)之间,所述力传感器(6)用于感知机器人钻孔时的操作力和力矩。
3.根据权利要求2所述的末端夹持装置,其特征在于,所述连接组件(4)包括:
4.根据权利要求3所述的末端夹持装置,其特征在于,所述连接组件(4)还包括第三连接件(43),所述第三连接件(43)设置于所述第一连接件(41)和所述力传感器(6)之间,且所述第三连接件(43)由绝缘材质制成,与所述第一连接件(41)螺纹连接。
5.根据权利要求4所述的末端夹持装置,其特征在于,所述第一连接件(41)包括:
6.根据权利要求5所述的末端夹持装置,其特征在于,所述第二锁紧件(7)的其中一端设置为锥形,用于实现所述第一连接件(41)和所述第二连接件(42)的锁紧。
7.根据权利要求5所述的末端夹持装置,其特征在于,所述第一连接件(41)还包括限位部(414),所述限位部(414)的延伸方向与所述中空连接轴(412)的轴线相平行,且所述限位部(414)上开设有与所述第一连接孔(413)对应的螺纹孔(415),所述第二锁紧件(7)贯穿所述螺纹孔(415)实现锁紧。
8.根据权利要求5所述的末端夹持装置,其特征在于,所述套筒连接部(424)的外周均匀分布有多个齿状凹槽(425),所述延伸部(21)的端部设置有齿状凸起(211),所述齿状凸起(211)与其中一个所述齿状凹槽(425)配合。
9.根据权利要求1所述的末端夹持装置,其特征在于,还包括机头锁紧件(8),所述机头锁紧件(8)与所述马达套筒(2)螺纹连接,且所述机头锁紧件(8)与机头之间还设置有垫圈。
10.根据权利要求1所述的末端夹持装置,其特征在于,所述马达套筒(2)与所述延伸部(21)相对的侧壁上开设有观察槽(22)。
技术总结
本技术涉及医疗器械技术领域,提供一种末端夹持装置,包括:法兰,与所述机器人末端连接;马达套筒,套设于所述种植手机的马达的外周,所述马达套筒的侧壁向外具有延伸部;连接组件,一端与所述法兰远离所述机器人末端的一端连接,另一端与所述延伸部连接;且所述延伸部的轴线与所述法兰的轴线互相垂直;第一锁紧件,贯穿所述延伸部,且将所述连接组件和所述马达套筒锁紧固定。本技术提供的末端夹持装置,能够实现马达与机器人末端的牢固固定,提高种植体的种植精度,同时还能够实现种植手机的马达与机头部分的快速换装、夹持,可以灵活地调整安装角度。
技术研发人员:梅俊勇,孙贝,郝艳杰
受保护的技术使用者:雅客智慧(北京)科技有限公司
技术研发日:20230130
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!