一种咽拭子采样机器人的制作方法
本技术涉及自动化设备,尤其涉及一种咽拭子采样机器人。
背景技术:
1、正常人咽峡部培养应有口腔正常菌群,而无致病菌生长。咽部的细菌均来自外界,正常情况下不致病,但在机体全身或局部抵抗力下降和其他外部因素下可以出现感染等而导致疾病。因此,咽部拭子细菌培养能分离出致病菌,有助于白喉、化脓性扁桃体炎、急性咽喉炎等的诊断。
2、咽部是病毒聚集较多的地方,咽拭子标本就是医用棉签,从人体的咽部蘸取少量分泌物,采取的样本就是咽拭子标本,为了检验呼吸道疾病病毒类型,往往通过咽拭子可以方便快捷准确地检测出病毒类型。
3、咽拭子筛查是疫情防控的重要手段,咽拭子的采集通常为具有一定经验的医生或护士进行操作,现有的咽拭子采样装置无法模拟医生和护士对被采集者的咽部进行采集,由于被采集者的咽部具体位置不尽相同,采样装置容易出现采集力度大对被采样者造成伤害或不适。
技术实现思路
1、鉴于上述的分析,本实用新型旨在提供一种咽拭子采样机器人,用以解决问题。
2、本实用新型的目的主要是通过以下技术方案实现的:
3、一种咽拭子采样机器人,包括壳板、第一开口槽、驱动机构和采样装置;6个所述壳板拼接成方形壳体,所述方形壳体内部设有驱动机构,所述驱动机构连接有采样装置,相邻的第一个所述壳板和第二个所述壳板内均开设有供采样装置伸出方形壳体的第一开口槽;
4、所述采样装置包括采样机、壳料定位块、压力传感器、摄像头、亮光灯珠、三杆摆动构件、棉签探出压力传导构件和棉签插槽;所述采样机端部设有壳料定位块、棉签插槽、摄像头和亮光灯珠,所述采样机内部设有连接棉签插槽的三杆摆动构件,所述三杆摆动构件包括3个伸缩杆件,伸缩杆件之间平行且不再同一平面上,所述三杆摆动构件通过棉签探出压力传导构件连接有压力传感器。
5、进一步的,所述驱动机构包括y滑台构件、x滑台构件、水平旋转构件、支撑横板和支撑竖板;所述y滑台构件滑动连接有x滑台构件,所述x滑台构件滑动连接有水平旋转构件,所述水平旋转构件上端安装有支撑横板,所述支撑横板端部安装有支撑竖板。
6、进一步的,第一个所述壳板表面安装有试管条形码扫描器、显示控制器、usb连接器、开关按钮和急停复位按钮。
7、进一步的,第二个所述壳板表面安装有读卡器和超声波传感器,所述超声波传感器位于所述第一开口槽下方3-5cm处。
8、进一步的,所述壳板表面安装有用于遮挡所述第一开口槽的滑动盖板。
9、进一步的,所述方形壳体内部安装有消毒喷头。
10、进一步的,所述方形壳体内部设有加固框架。
11、进一步的,所述方形壳体一侧安装有电源接口,所述电源接口内设有电源开关。
12、进一步的,所述驱动机构包括往复运动动力装置和转动伸缩装置;所述往复运动动力装置一侧安装有转动伸缩装置。
13、进一步的,所述往复运动动力装置包括驱动电机、输出轴、第一转动杆、第二转动杆、直齿条、直齿轮和第一传动轴;所述驱动电机安装在输出轴的一侧,所述输出轴另一侧安装有第一转动杆,所述第一转动杆转动连接有第二转动杆,所述第二转动杆转动连接有直齿条,所述直齿条啮合有直齿轮,所述直齿轮一侧安装有第一传动轴。
14、进一步的,所述往复运动动力装置还包括定位杆、第一轴承和限位板;所述定位杆一端固定有第一轴承,所述第一轴承套设在所述第一传动轴上,所属定位杆中部固定有一对限位板,所述限位板设在直齿条的两侧。
15、进一步的,所述转动伸缩装置包括伸缩机构、主动锥齿轮、第一被动锥齿轮、第二被动锥齿轮、第二传动轴和第三中空传动轴;所述主动锥齿轮两侧分别铰接有第一被动锥齿轮和第二被动锥齿轮,所述第一被动锥齿轮中部安装有第三中空传动轴,所述第二被动锥齿轮中部安装有第二传动轴,所述第二传动轴与所述第三中空传动轴具有相同的转动轴线,所述第二传动轴和第三中空传动轴的上端部均安装有伸缩机构,所述第二传动轴和第三中空传动轴端部的伸缩机构在完全伸长时的夹角为90°。
16、进一步的,所述伸缩机构包括伸缩固定块、主动接触固定圆杆、被动接触滑动圆杆、第二l形连接杆、限位插块、伸缩套杆、交叉铰接杆和收回弹簧;所述伸缩固定块内部开设有供被动接触滑动圆杆滑动的第一圆柱形槽,且所述伸缩固定块内部还开设有垂直于第一圆柱形槽的第二圆柱形槽,所述主动接触固定圆杆接触连接被动接触滑动圆杆,且所述主动接触固定圆杆一端固定在所述壳板上,所述伸缩固定块一侧固定有第二l形连接杆的一端,第二l形连接杆的另一端安装有伸缩套杆,所述伸缩套杆的固定部分的初始段与所述伸缩套杆的伸缩末节的伸缩段通过交叉铰接杆连接,所述被动接触滑动圆杆一侧固定有用于改变交叉铰接杆形状的限位插块,所述交叉铰接杆的两个上下位置对应的铰接部之间安装有收回弹簧。
17、进一步的,所述第二传动轴连接的所述伸缩机构的伸缩套杆为7节段的伸缩套杆,所述第三中空传动轴的所述伸缩机构的伸缩套杆为2节段的伸缩套杆。
18、进一步的,所述主动锥齿轮、第一被动锥齿轮和第二被动锥齿轮中部均安装有第二轴承座,安装在所述主动锥齿轮中部的第二轴承座与其余两个第二轴承座之间通过第一l形连接杆连接。
19、进一步的,所述壳料定位块外部安装有可拆卸的一次性防护壳料。
20、进一步的,所述棉签插槽内安装有可拆卸的采集棉签拭子。
21、上述技术方案至少具有如下有益效果之一:
22、1、本实用新型的三杆摆动构件、棉签探出压力传导构件和压力传感器的设置在确保采集到咽部样本的同时避免了采集力度大对被采样者造成伤害或不适;
23、2、本实用新型的咽拭子采样机器人,被采集者和咽拭子采集工作人员之间呈90度,避免了被采集者的飞沫飞向咽拭子采集工作人员,保护咽拭子采集工作人员在工作过程中被传播细菌和病毒的风险;
24、3、本实用新型的咽拭子采样机器人,棉签拭子通过采样头内的摄像头检测采集区域,控制棉签拭子自动移动至采集区域进行采集,再通过摄像头采集的图像内口腔位置和压力传感器可自行判断采集是否成功,使咽拭子采集无需进行专业的医护培训,非专业人员通过使用说明即可快速上手操作;
25、4、本实用新型的咽拭子采样机器人具有身份识别功能,能够通过身份证读卡器和摄像头确认被检测者的身份,避免盗刷和误刷的发生,同时被检测者的检测照片及视频会被储存,以便溯源;
26、5、本实用新型的咽拭子采样机器人结构小巧,可置于办公桌等平面上进行咽拭子采样操作,便于设立采样点及撤离,成本低,使用方便。
27、本实用新型中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本实用新型的其他特征和优点将在随后的内容中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本实用新型而了解。本实用新型的目的和其他优点可通过文字以及附图中所特别指出的内容中来实现和获得。
技术特征:
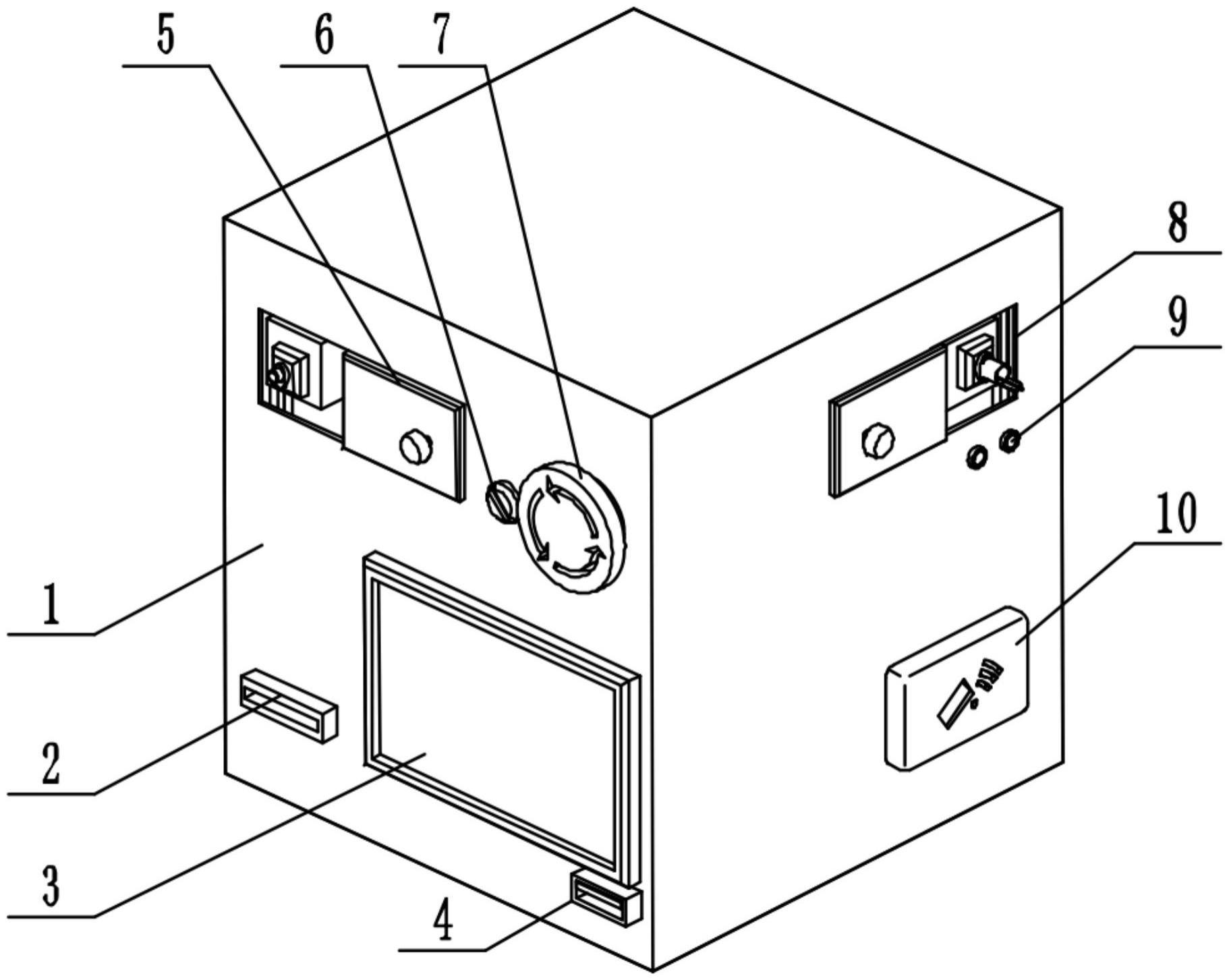
1.一种咽拭子采样机器人,其特征在于,包括壳板(1)、第一开口槽(8)、驱动机构(17)和采样装置(13);6个所述壳板(1)拼接成方形壳体,所述方形壳体内部设有驱动机构(17),所述驱动机构(17)连接有采样装置(13),相邻的第一个所述壳板(1)和第二个所述壳板(1)内均开设有供采样装置(13)伸出方形壳体的第一开口槽(8);
2.根据权利要求1所述的一种咽拭子采样机器人,其特征在于,所述驱动机构(17)包括y滑台构件(17a1)、x滑台构件(17a2)、水平旋转构件(17a3)、支撑横板(17a4)和支撑竖板(17a5);所述y滑台构件(17a1)滑动连接有x滑台构件(17a2),所述x滑台构件(17a2)滑动连接有水平旋转构件(17a3),所述水平旋转构件(17a3)上端安装有支撑横板(17a4),所述支撑横板(17a4)端部安装有支撑竖板(17a5)。
3.根据权利要求1所述的一种咽拭子采样机器人,其特征在于,第一个所述壳板(1)表面安装有试管条形码扫描器(2)、显示控制器(3)、usb连接器(4)、开关按钮(6)和急停复位按钮(7)。
4.根据权利要求1所述的一种咽拭子采样机器人,其特征在于,第二个所述壳板(1)表面安装有读卡器(10)和超声波传感器(9),所述超声波传感器(9)位于所述第一开口槽(8)下方3-5cm处。
5.根据权利要求1所述的一种咽拭子采样机器人,其特征在于,所述壳板(1)表面安装有用于遮挡所述第一开口槽(8)的滑动盖板(5)。
6.根据权利要求1所述的一种咽拭子采样机器人,其特征在于,所述方形壳体内部安装有消毒喷头。
7.根据权利要求1所述的一种咽拭子采样机器人,其特征在于,所述方形壳体内部设有加固框架(18)。
8.根据权利要求1所述的一种咽拭子采样机器人,其特征在于,所述方形壳体一侧安装有电源接口,所述电源接口内设有电源开关。
9.根据权利要求1所述的一种咽拭子采样机器人,其特征在于,所述壳料定位块(13a2)外部安装有可拆卸的一次性防护壳料(15)。
10.根据权利要求1所述的一种咽拭子采样机器人,其特征在于,所述棉签插槽(13a5)内安装有可拆卸的采集棉签拭子(16)。
技术总结
本技术涉及一种咽拭子采样机器人,属于自动化设备技术领域,解决了咽拭子检测需要人工进行采样的问题。咽拭子采样机器人包括包括壳板、第一开口槽、驱动机构和采样装置;6个所述壳板拼接成方形壳体,所述方形壳体内部设有驱动机构,所述驱动机构连接有采样装置,相邻的第一个所述壳板和第二个所述壳板内均开设有供采样装置伸出方形壳体的第一开口槽。本技术的三杆摆动构件、棉签探出压力传导构件和压力传感器在确保采集到咽部样本的同时避免了采集力度大对被采样者造成伤害或不适。
技术研发人员:杨威,孙云,陈明辉,齐向阳,于刚
受保护的技术使用者:沈苏科技(苏州)股份有限公司
技术研发日:20230202
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!