一种下肢康复机器人双脚距离、角度调节机构的制作方法
本技术涉及下肢康复器械,具体涉及一种下肢康复机器人双脚距离、角度调节机构。
背景技术:
1、众所周知,随着我国老龄化人口的增多,老龄化的问题越来越受到各界关注。在老龄化人群中有大量因中风而留下偏瘫等下肢运动障碍的患者,此外也有因交通事故造成的肢体损伤甚至偏瘫的患者,他们的正常生活受到了严重的影响。
2、医学实践证明,这类病人想要提高和恢复下肢运动功能,除了手术和药物治疗,还需要科学的、有针对性的康复治疗,康复机器人应运而生。
3、目前下肢康复机器人技术真正成熟者并不多,而在已有的下肢康复机器人中,其可以进行踝关节训练的很少,其中可以进行双脚距离、角度调节的更是空白。
4、部分下肢康复机器人因其机械结构的问题,不能根据病人的不同情况进行双脚距离、角度的调节,这使医院对患者内翻足、外翻足的病情不能及时治疗,因此,提出一种下肢康复机器人双脚距离、角度调节机构就显得尤为重要。
技术实现思路
1、本实用新型为了解决现有的下肢康复机器人双脚距离、角度无法调节的问题,提供了一种下肢康复机器人双脚距离、角度调节机构,该机构能够自由调节下肢康复机器人双脚距离、角度,良好适配不同病情的患者,提高患者的舒适度。
2、为了实现上述目的,本实用新型的技术方案是:
3、一种下肢康复机器人双脚距离、角度调节机构,包括运动机构和调节机构,所述运动机构包括上连接杆,所述上连接杆与调节机构连接,所述调节机构包括后跟块、固定块、大压块、小压块、固定把手和调节轴,所述后跟块一端开设有与上连接杆形状匹配的凹槽,所述上连接杆一侧位于后跟块凹槽内、另一侧设有固定块,所述固定块与后跟块连接,所述固定块上设有小压块,所述上连接杆上对应小压块处开设有调节孔,所述调节轴从后跟块两侧穿过,所述后跟块另一端设有大压块,所述大压块顶在调节轴一侧,所述固定把手穿过大压块、后跟块和调节孔后与小压块连接。通过转动固定把手将大压块和小压块拧松,使后跟块能够在调节轴上滑动,上连接杆能够在后跟块的凹槽内转动,使康复机器人根据患者的情况对双脚进行调节,良好的适配不同病情的患者,提高患者使用的舒适度。
4、进一步地,所述调节轴两端分别设有调节轴端盖和踝关节后上连接块。调节轴端盖防止后跟块从调节轴上滑脱。
5、进一步地,所述运动机构包括下连接杆,所述下连接杆和上连接杆均呈“u”形。“u”形的下连接杆和上连接杆能够更好的适应人体脚部形状,使患者使用更舒适。
6、进一步地,所述下连接杆一端转动连接有关节轴承,所述上连接杆对应关节轴承处一端设有脚踝中间连接块,所述脚踝中间连接块与关节轴承连接。
7、进一步地,所述下连接杆一端设有踝关节内侧连接块,所述踝关节内侧连接块上设有旋转固定轴。
8、进一步地,所述上连接杆一端设有踝关节外侧连接块,所述踝关节外侧连接块通过旋转固定轴与内侧连接块连接,所述踝关节外侧连接块围绕旋转固定轴转动。通过关节轴承和旋转固定轴使上连接杆能够转动,适应患者双脚运动时的踝关节活动。
9、通过上述技术方案,本实用新型的有益效果为:
10、本实用新型通过大压块和小压块分别对调节轴和上连接杆进行压紧,通过转动固定把手将大压块和小压块拧松,使后跟块能够在调节轴上滑动,上连接杆能够在后跟块的凹槽内转动,实现对双脚距离、角度的调节,调节轴的长度限制双脚的调节距离,上连接杆上的调节孔限制双脚的调节角度,使康复机器人根据患者的情况对双脚进行调节,良好的适配不同病情的患者,提高患者使用的舒适度。
技术特征:
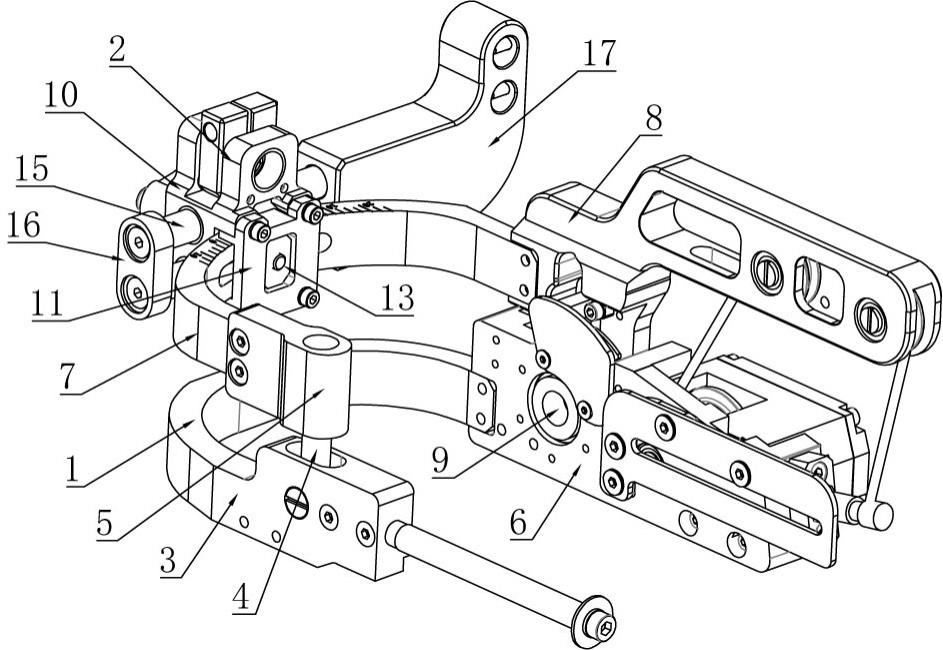
1.一种下肢康复机器人双脚距离、角度调节机构,其特征在于,包括运动机构(1)和调节机构(2),所述运动机构(1)包括上连接杆(7),所述上连接杆(7)与调节机构(2)连接,所述调节机构(2)包括后跟块(10)、固定块(11)、大压块(12)、小压块(13)、固定把手(14)和调节轴(15),所述后跟块(10)一端开设有与上连接杆(7)形状匹配的凹槽,所述上连接杆(7)一侧位于后跟块(10)凹槽内、另一侧设有固定块(11),所述固定块(11)与后跟块(10)连接,所述固定块(11)上设有小压块(13),所述上连接杆(7)上对应小压块(13)处开设有调节孔,所述调节轴(15)从后跟块(10)两侧穿过,所述后跟块(10)另一端设有大压块(12),所述大压块(12)顶在调节轴(15)一侧,所述固定把手(14)穿过大压块(12)、后跟块(10)和调节孔后与小压块(13)连接。
2.根据权利要求1所述一种下肢康复机器人双脚距离、角度调节机构,其特征在于,所述调节轴(15)两端分别设有调节轴端盖(16)和踝关节后上连接块(17)。
3.根据权利要求1所述一种下肢康复机器人双脚距离、角度调节机构,其特征在于,所述运动机构(1)包括下连接杆(3),所述下连接杆(3)和上连接杆(7)均呈“u”形。
4.根据权利要求3所述一种下肢康复机器人双脚距离、角度调节机构,其特征在于,所述下连接杆(3)一端转动连接有关节轴承(4),所述上连接杆(7)对应关节轴承(4)处一端设有脚踝中间连接块(5),所述脚踝中间连接块(5)与关节轴承(4)连接。
5.根据权利要求3所述一种下肢康复机器人双脚距离、角度调节机构,其特征在于,所述下连接杆(3)一端设有踝关节内侧连接块(6),所述踝关节内侧连接块(6)上设有旋转固定轴(9)。
6.根据权利要求5所述一种下肢康复机器人双脚距离、角度调节机构,其特征在于,所述上连接杆(7)一端设有踝关节外侧连接块(8),所述踝关节外侧连接块(8)通过旋转固定轴(9)与内侧连接块(6)连接,所述踝关节外侧连接块(8)围绕旋转固定轴(9)转动。
技术总结
本技术涉及下肢康复器械技术领域,具体涉及一种下肢康复机器人双脚距离、角度调节机构,包括运动机构和调节机构,所述运动机构包括上连接杆,所述上连接杆与调节机构连接,所述调节机构包括后跟块、固定块、大压块、小压块、固定把手和调节轴。本技术通过转动固定把手将大压块和小压块拧松,使后跟块能够在调节轴上滑动,上连接杆能够在后跟块的凹槽内转动,使康复机器人根据患者的情况对双脚进行调节,良好的适配不同病情的患者,提高患者使用的舒适度。
技术研发人员:王景信,牛栓柱,李强,李军威,唐浩鹤,罗彬彬,梁建伟,张君喜
受保护的技术使用者:创世纪智能机器人(河南)有限公司
技术研发日:20230214
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!